第七课 机器人设计与传动-1
约 1070 个字 18 张图片 预计阅读时间 4 分钟
4. 舵机工作原理¶
4.1 模拟舵机¶
通过不同PWM脉冲,控制位置和角度;电机一般和齿轮组一起工作进行驱动;点位器是为了检测当前的角度信息,反馈到控制电路,所以这是全闭环控制;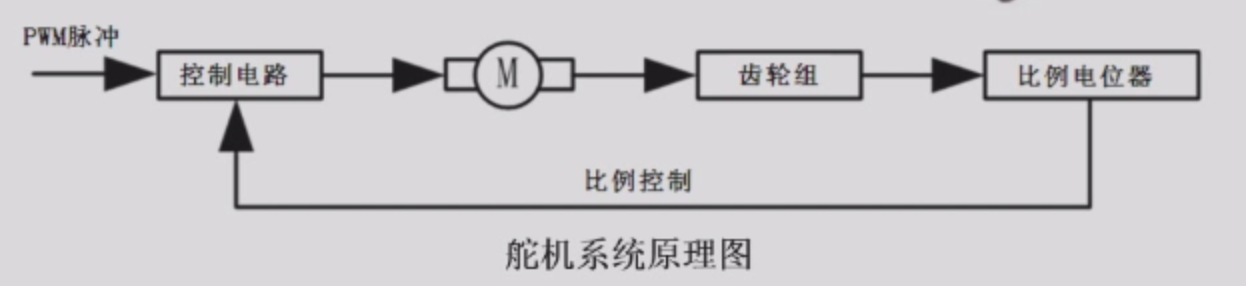 标准舵机有三条控制线,分别为电源线、地线和控制线;控制线连接到控制芯片上。
标准舵机有三条控制线,分别为电源线、地线和控制线;控制线连接到控制芯片上。
4.2 舵机位置控制¶
舵机转动角度由PWM(脉冲宽度调制)信号的占空比来实现;PWM周期为20ms,脉宽分布在0.5-2.5ms之间;不同脉宽对应不同角度,为线性变化;
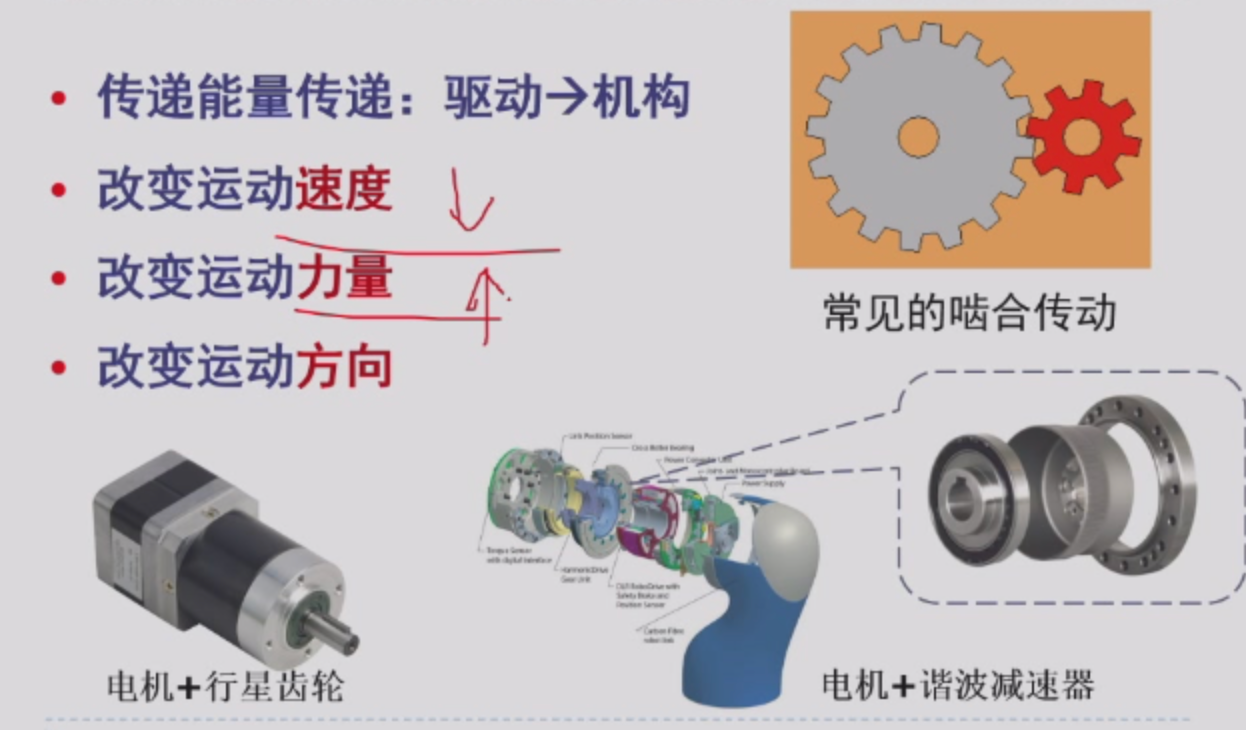
4.3 电机+减速器¶
机器人设计与传动-1¶
0. 概述¶
The Design Process: As a Flow Chart(流程图)
首先明确用户需求,然后分解问题(用户需求,功能分解,用户条件等),概念设计,初步设计(形成一些图纸和模型),细节设计,最后形成设计文档;
分解和迭代是必不可少的;
problen:在传动机构中,由旋转运动变成直线运动的机构有哪些?
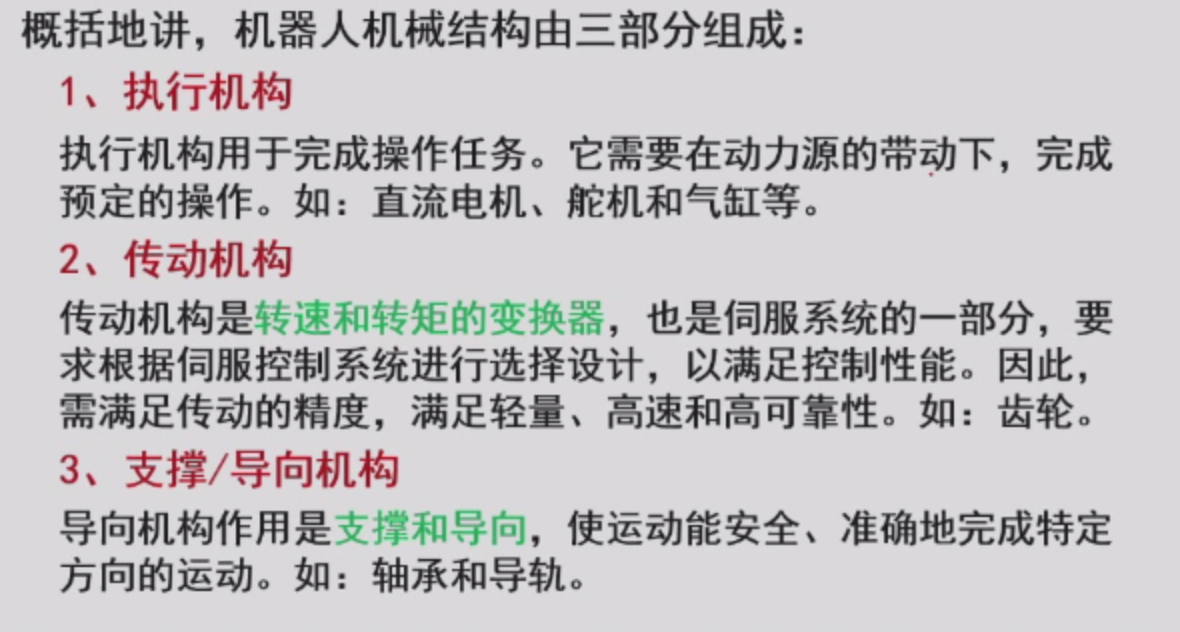
1. 机器人机构的组成¶
1.1 机器人机构的组成¶
-
设计的流程:明确执行机构、确定传动方式、设计导向机构、结构设计、优化分析、组装与测试;先明确电机大小(选型),然后选减速器(也就是从执行机构下手),然后按顺序往下进行设计;
-
传动机构的性能要求:
- 转动惯量:传动机构的质量和转动惯量应尽量小。否则,机构的负载会增大;系统响应会降低;固有频率会降低,易产生谐振;
- 刚度(越大越好):伺服系统动力损失小(变形损失能量小);频率要高,超出机构的频带宽度,使之不易产生共振;闭环系统更加稳定;
- 阻尼:阻尼越大,振动的振幅就越小,衰减也越快。但大阻尼会使系统稳态误差增大、精度降低。共振区域阻尼越大越好;远离共振区域阻尼越小越好;
- 其他:摩擦小、抗振性好、传动间隙小等。
-
减速比:
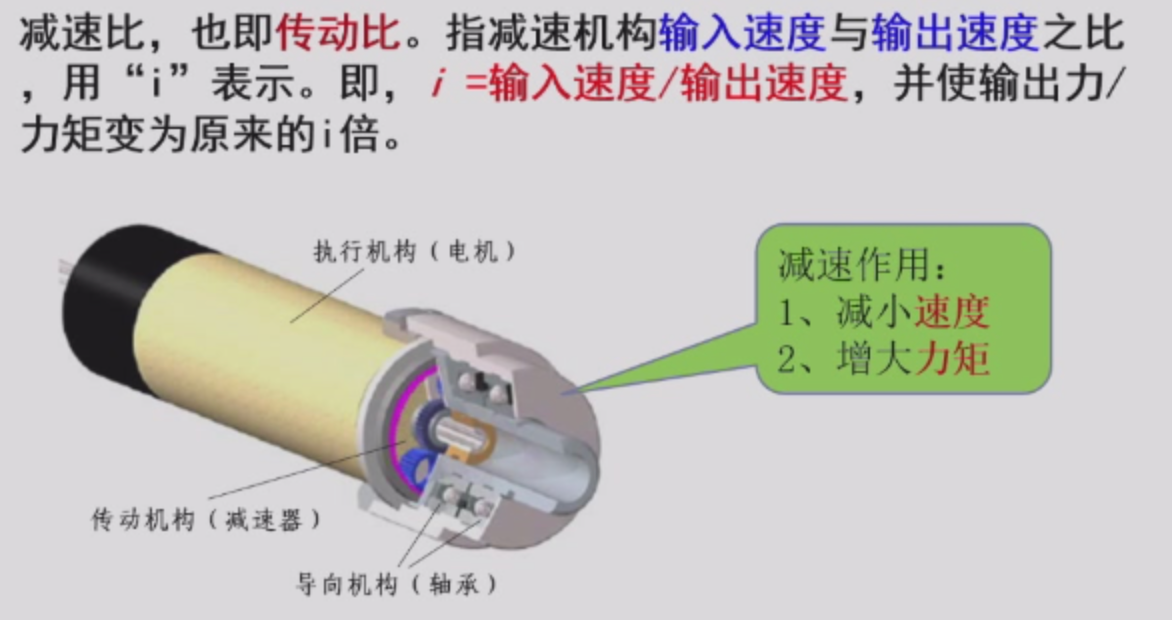
-
强度与刚度:刚度和强度没有关系,比如玻璃,强度小刚度大;比如很薄的钢板,强度高刚度小;刚度与结构设计(比如“工字型”)有关系;
-
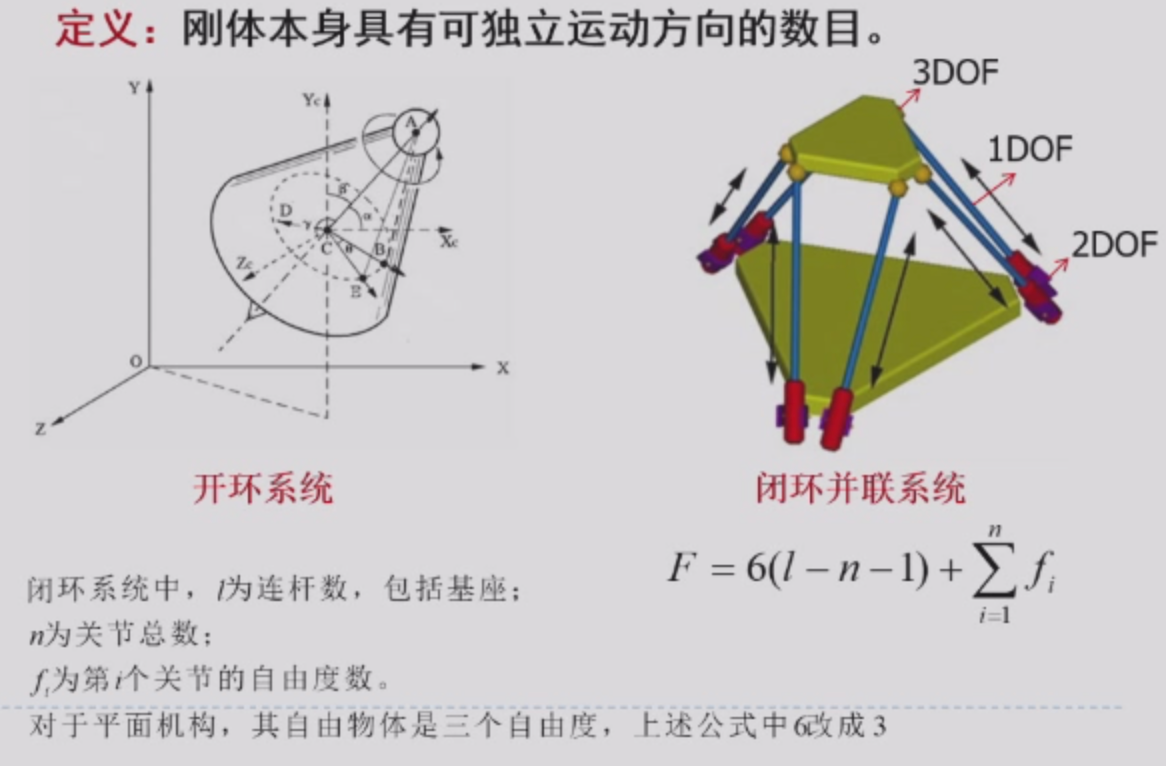
刚体的自由度:比如手臂有三个关节,七个自由度(肩关节前后、左右、旋转,手肘前后、旋转,手腕前后、左右、旋转),机械手一般有六个自由度;空间有六个自由度(xyz和绕着他们旋转),所以六个自由度代表可以到达空间中的任何位置;人的腿有六个自由度;
-
支撑和导向机构

3. 齿轮传动¶
齿轮传动是指由齿轮副传递运动和动力的装置,它是现代各种设备中应用最广泛的一种机械传动方式。优点:传动比较准确、效率高、结构紧凑、工作可靠、寿命长。
很多器件都是一个轴套两个齿轮。
齿形——渐开线:一个圆形,一支笔绕着圆做纯滚动运动,笔尖的轨迹就是渐开线;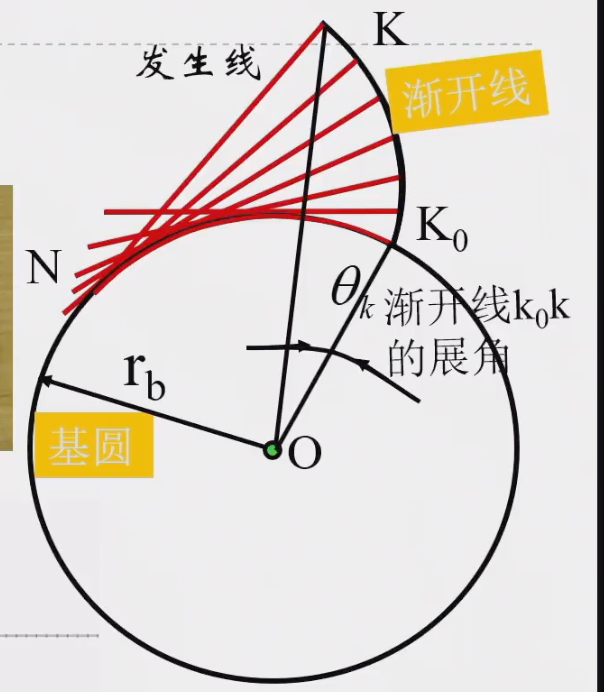
术语¶
-
齿顶圆就是外面的圆,齿根圆就是里面的圆。
-
基圆不太重要,其实就是生成这个齿轮圆弧所需要的基准圆。
-
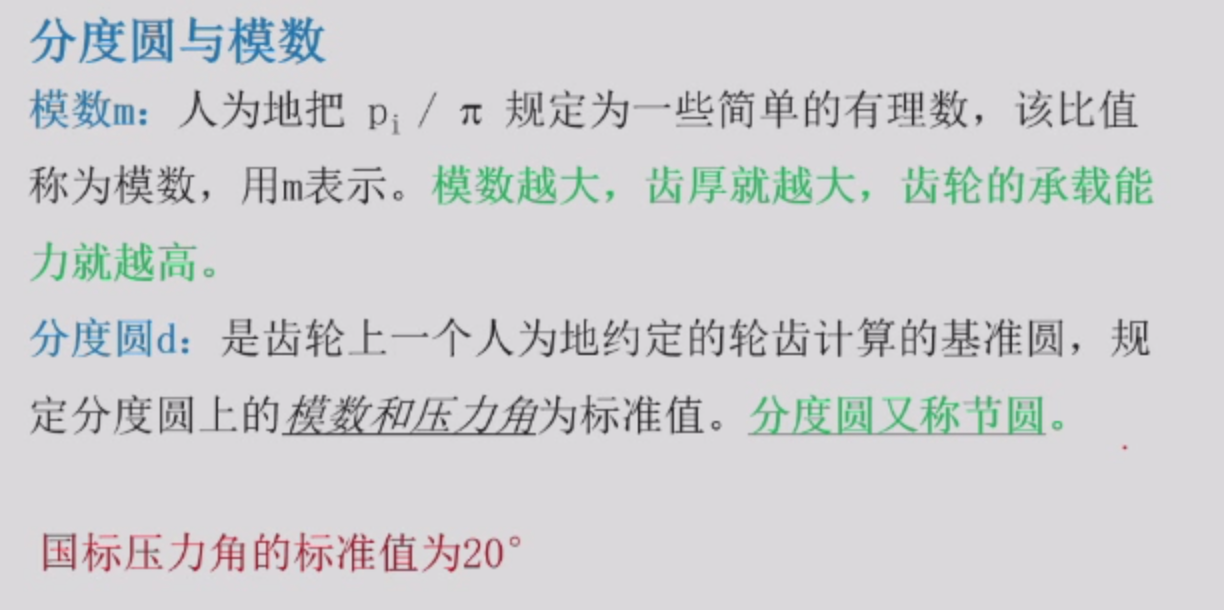
齿距和齿厚都在分度圆上。同一圆周上,pi = si + ei;

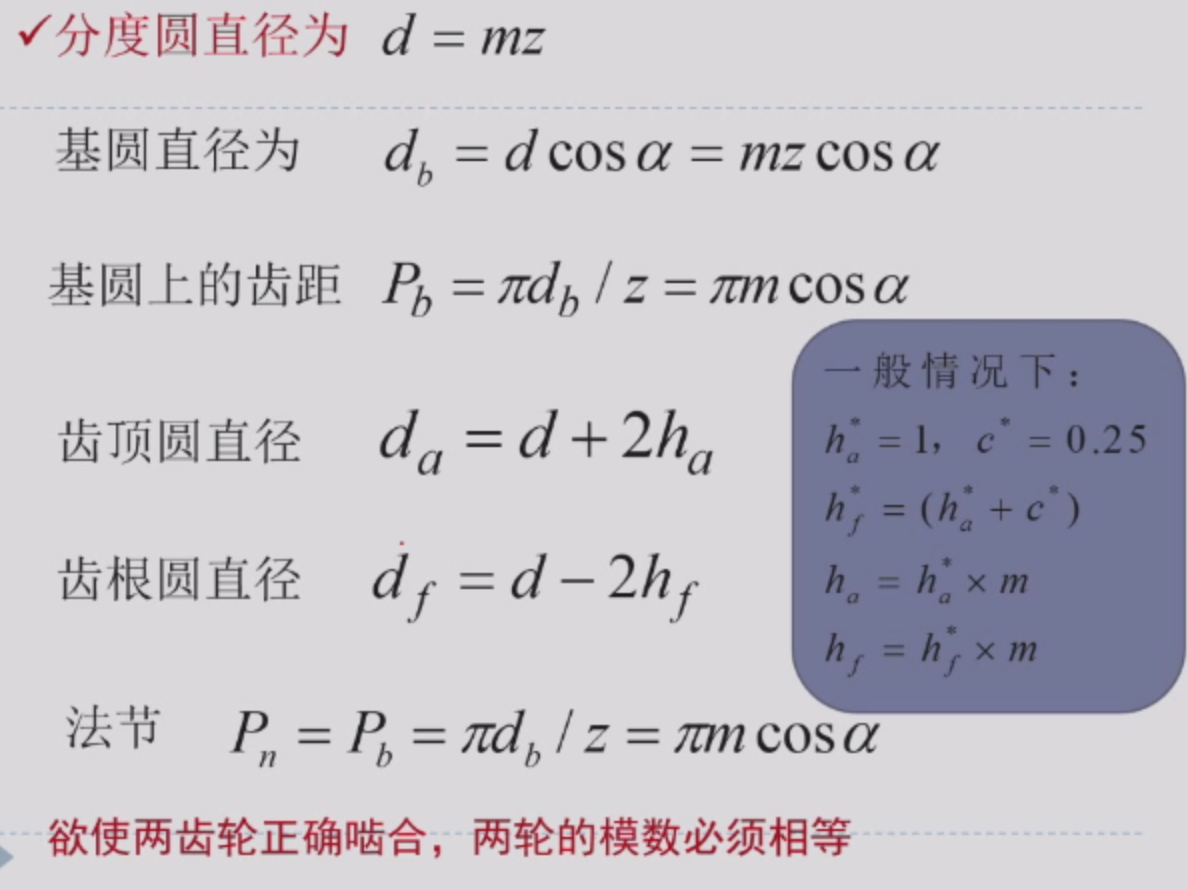
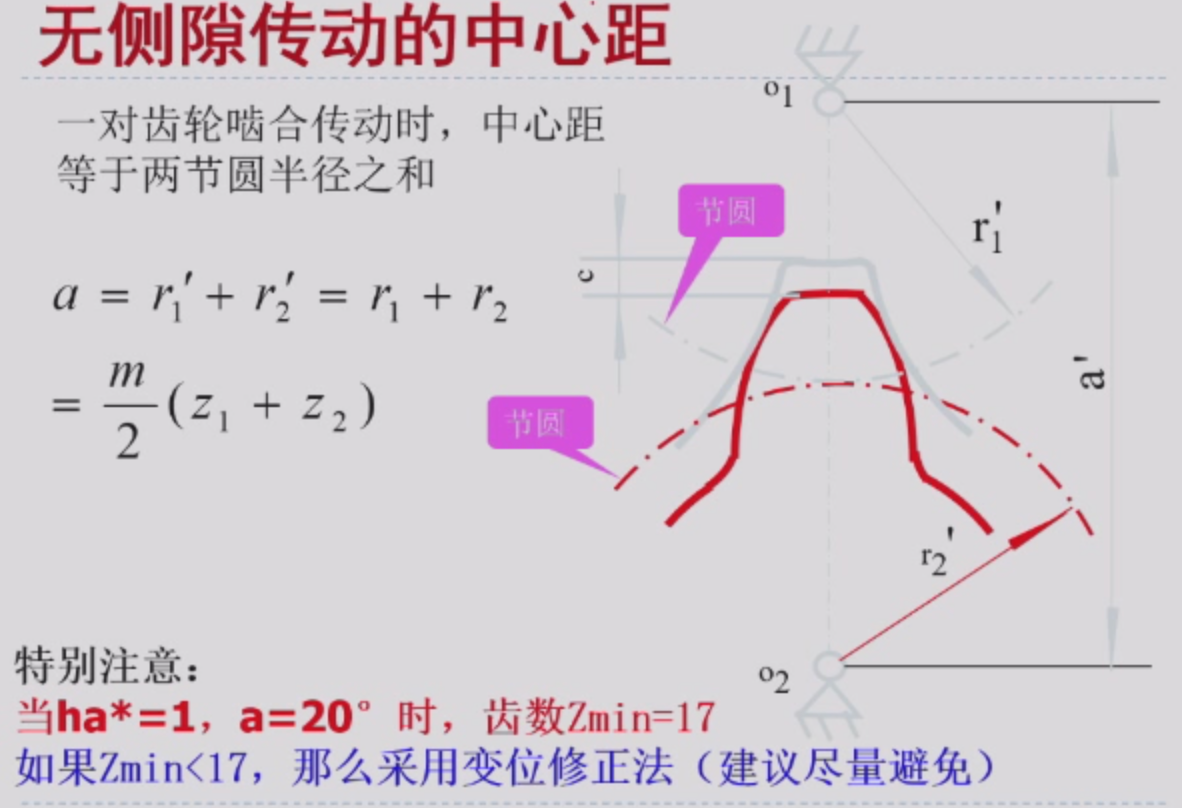
- 中心距就是两个分度圆的半径和
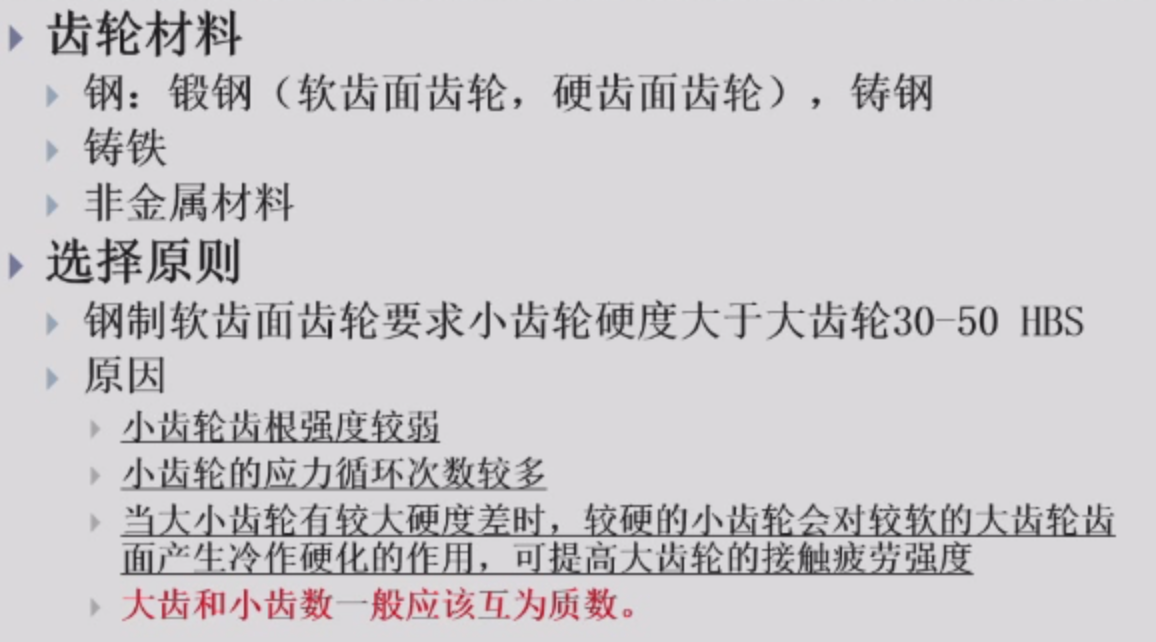
齿轮材料及选择原则¶
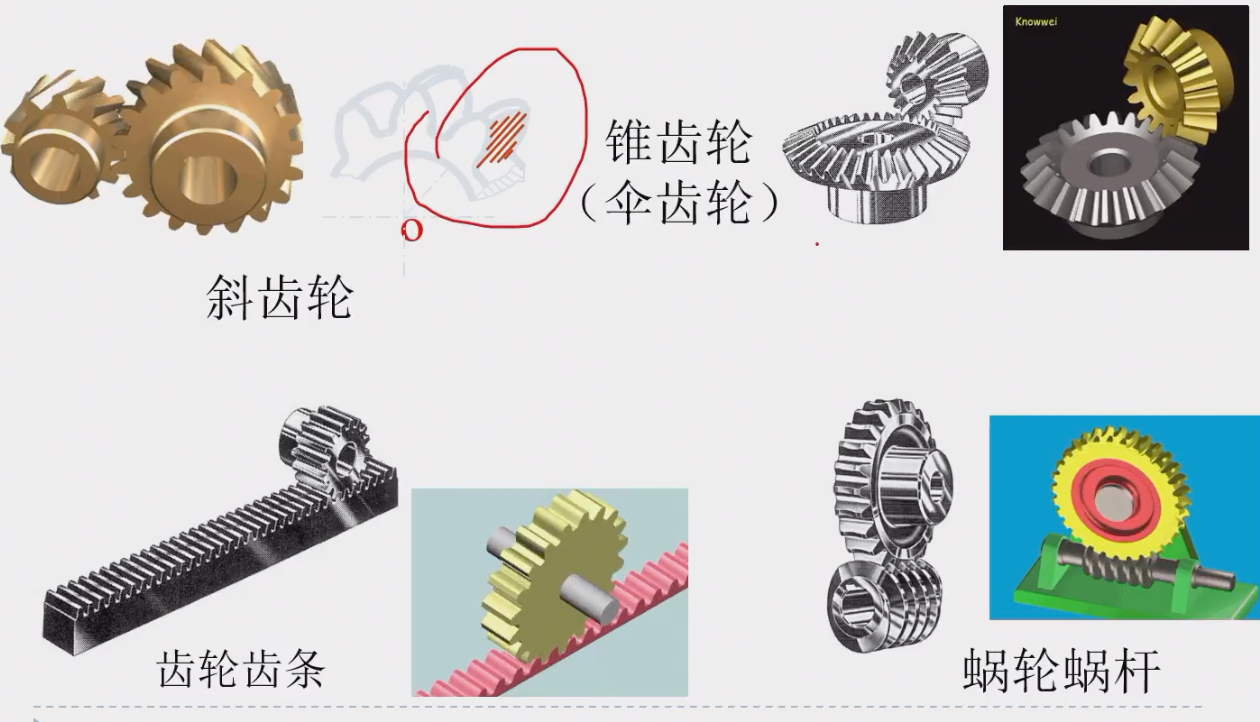
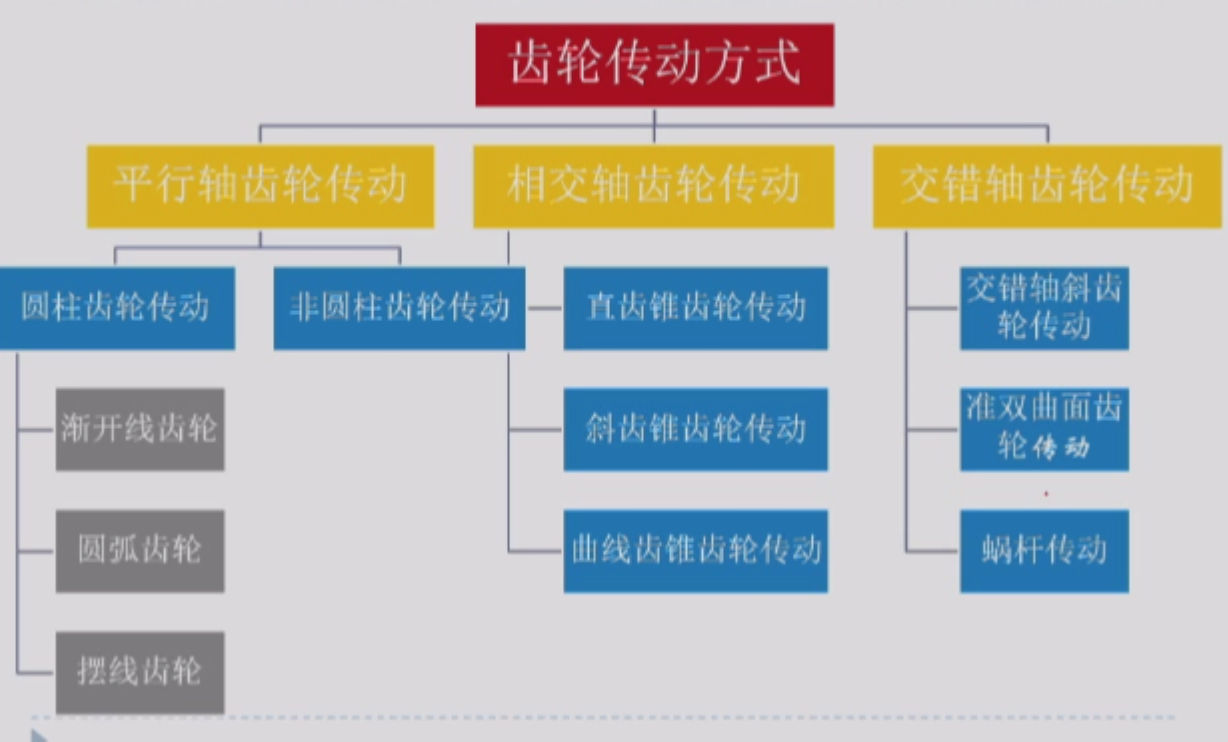
齿轮传动方式¶
- 斜齿轮:比较平稳,承重比较好;
- 锥齿轮:可以改变运行方向;
- 齿轮齿条:由旋转变成直线运行;
- 蜗轮蜗杆:带不动负载,有锁定功能,比如汽车的车窗,不是旋转变成直线运动,而是旋转变旋转;
- 内啮合齿轮:转动方向一致;
- 外啮合齿轮:转动方向内外相反;
齿轮轮系(大于两个齿轮)¶
分为定轴轮系和周转轮系;
-
定轴轮系,传动的时候所有的齿轮的几何轴线都是固定的。
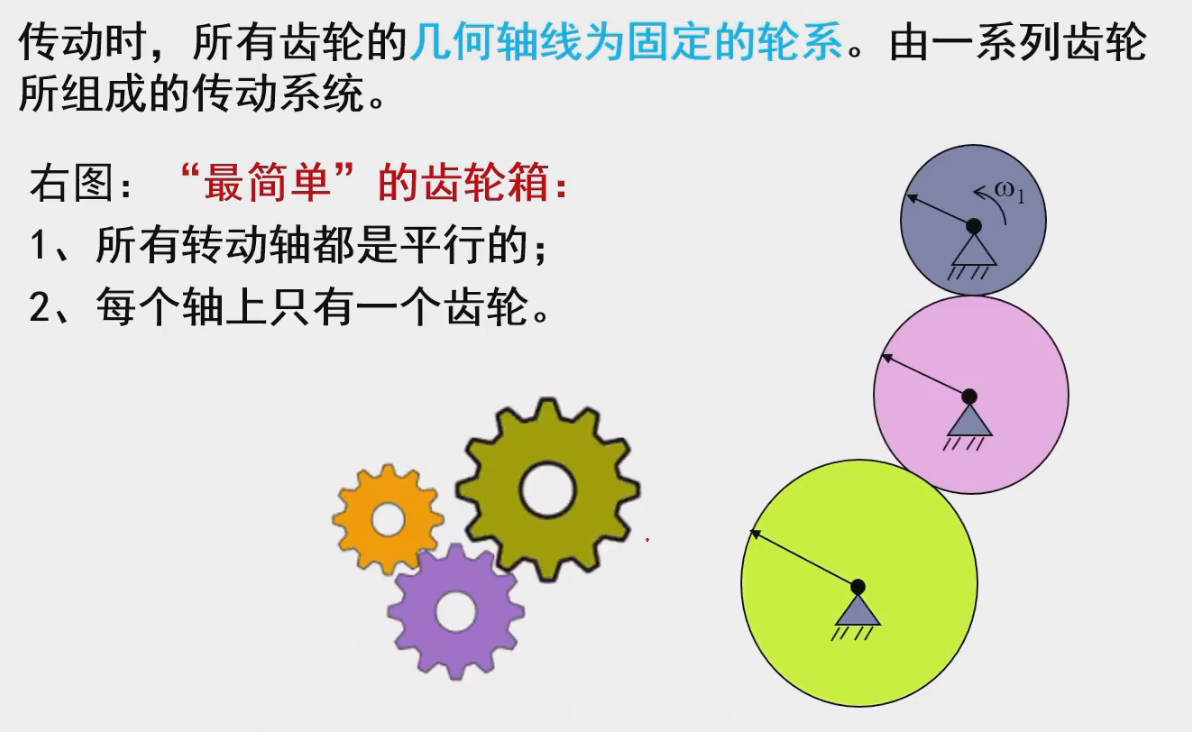
-
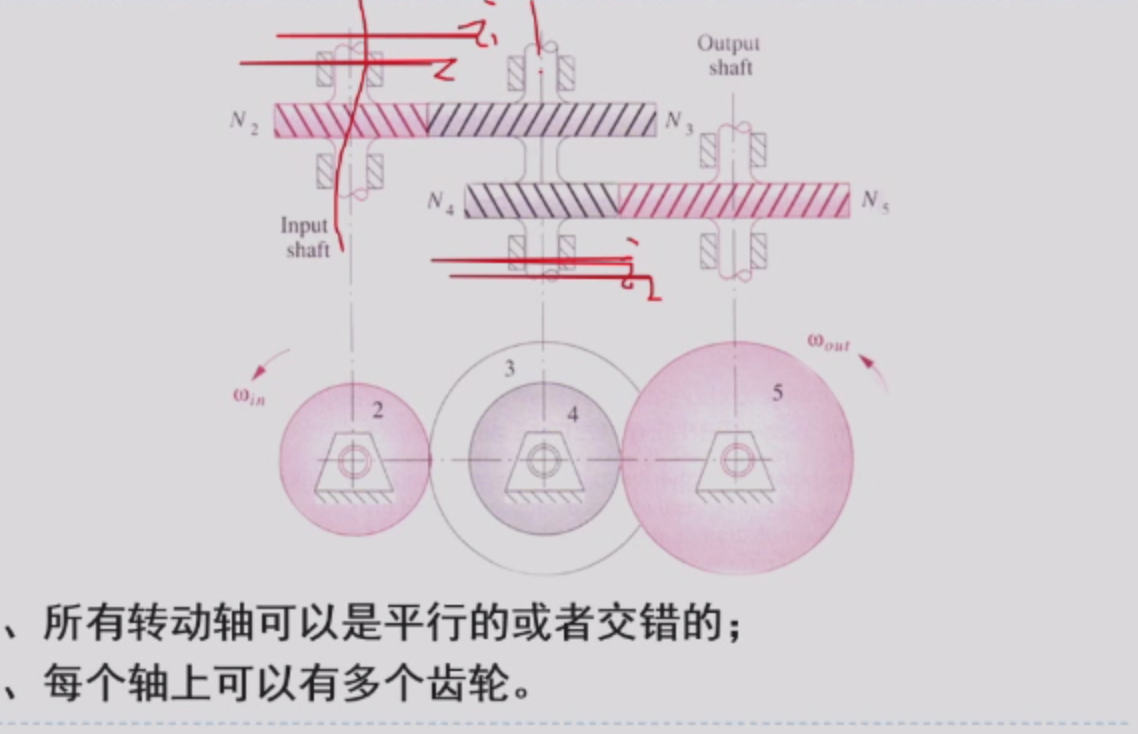
定轴齿轮箱:
本文总阅读量次