第5课
约 1628 个字 29 张图片 预计阅读时间 5 分钟
Dynamic Scheduling¶
1. 模型概述¶
- Method: out of order execution(乱序执行)
- 如下是比较早的模型:
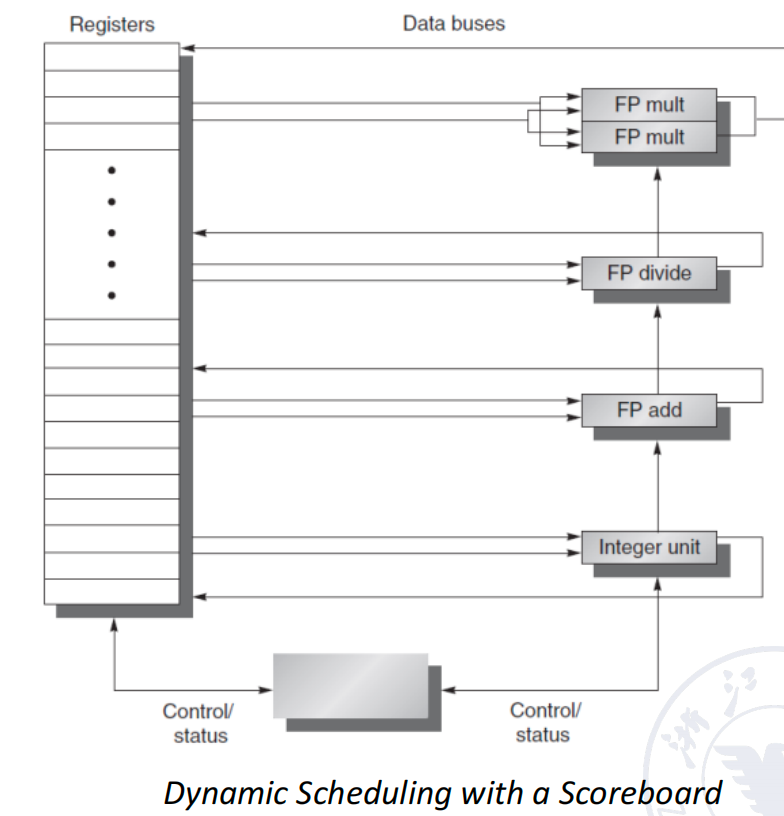
- scoreboard用来记录一些指令的状态信息和控制信号,比如功能部件的busy与否、指令所在的状态、寄存器(什么寄存器要被写,什么寄存器要被读入);
- register寄存器存放变量;
- 右边的是一些部件,两个乘法一个除法一个加法(这些都是浮点数的)和一个整数部件(load和store指令都要通过整数部件);
2. 整体实现¶
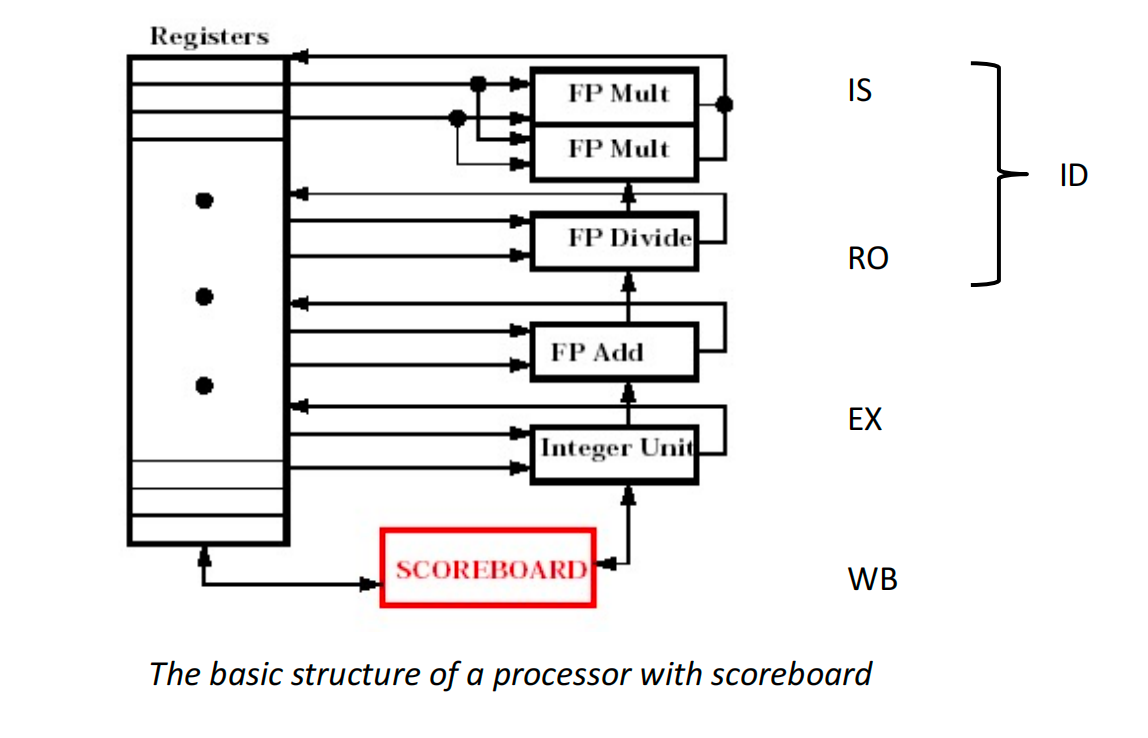
- 把ID段的功能再进行细分,去检查结构冲突和数据冲突;
- 即把ID段分成两个段:
- IS(Issue):解码指令,检查是否有结构(运算部件)冲突;(in-order issue)
- RO(Read Operands):(检查数据冲突)等待直到没有数据冲突,然后读操作数 (out of order execution),相当于之前的ID;
- 乱序在RO段就已经发生了,如果后面的指令和前面的指令元操作数没有冲突,而且没有结构冲突,那就直接先执行了;
- 对于顺序执行来说,WAR和WAW不会有任何问题,但是一旦有乱序,那么结果就会出现问题;

3. Scoreboard Algorithm¶
3.1 概况¶
- 这是一种调度指令的算法;
-
把一个指令执行过程分成四个阶段:
- IS:检测是否有结构冲突,如果没有,则IS段完成;
- RO:检测操作数(相当于原来流水线的ID),如果乱序从RO开始就是乱的;
-
加法周期短,所以一个就够了,而乘法比较慢,而且相对除法出现的概率较高;
3.2 Example¶
3.2.1 第一阶段¶
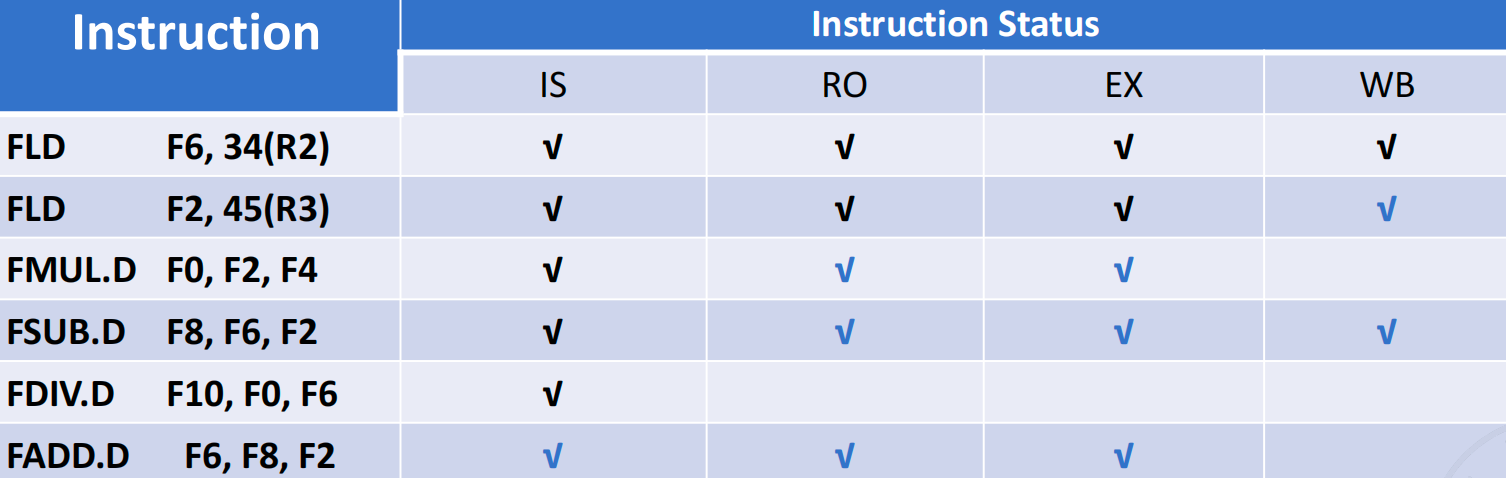
- 指令状态表
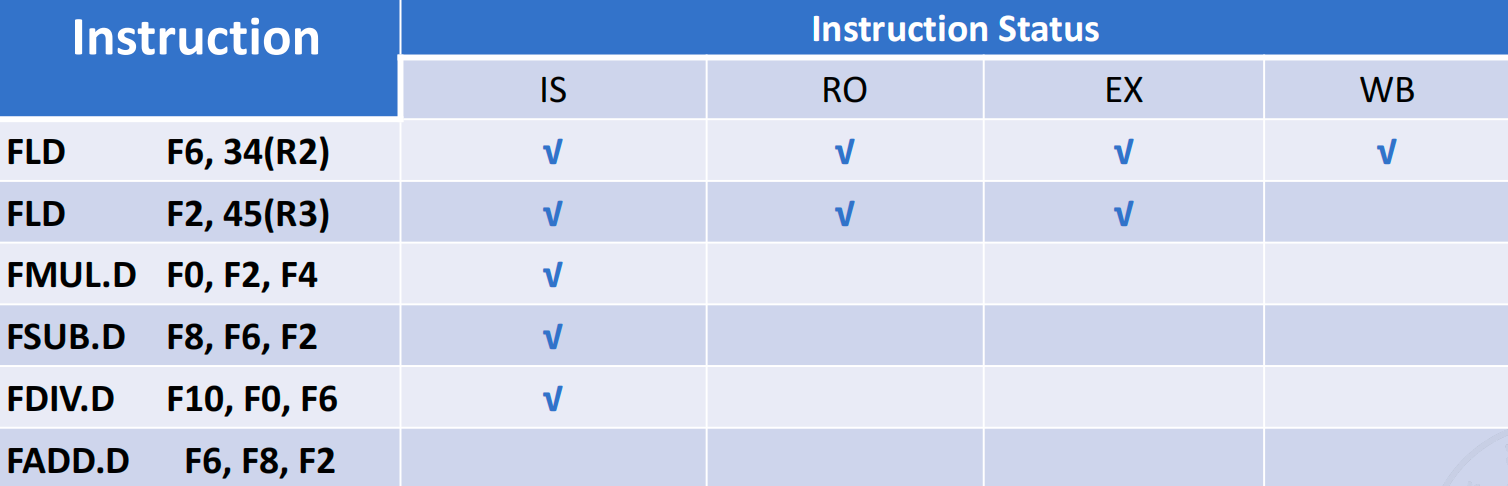
- 前面两个都可以执行没有问题;
- 第三到第五条因为数据有依赖,所以在RO卡住了;
- 而第六条,因为ADD部件被SUB占了,结构有冲突,所以在IS就卡住了;
-
寄存器状态表(存放结果寄存器的状态)

-
功能部件状态表
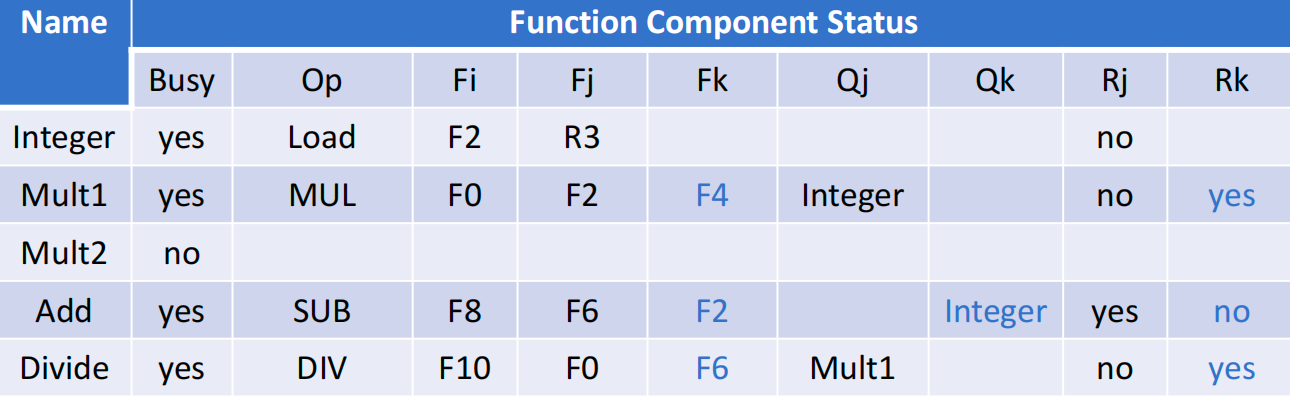
- 目前有四条指令在执行,所以有四个部件是处于忙碌状态;
- Op记录当前的操作;
- F代表源操作数和目的操作数(Fi是目的操作数,其实就是对应着寄存器状态表);
- Q表示从哪个功能部件来,比如第二行Mult1,F2就从Integer里来,可以表示等待的关系;
- R表示源操作数在哪,yes表示要等另一个源操作数ready;

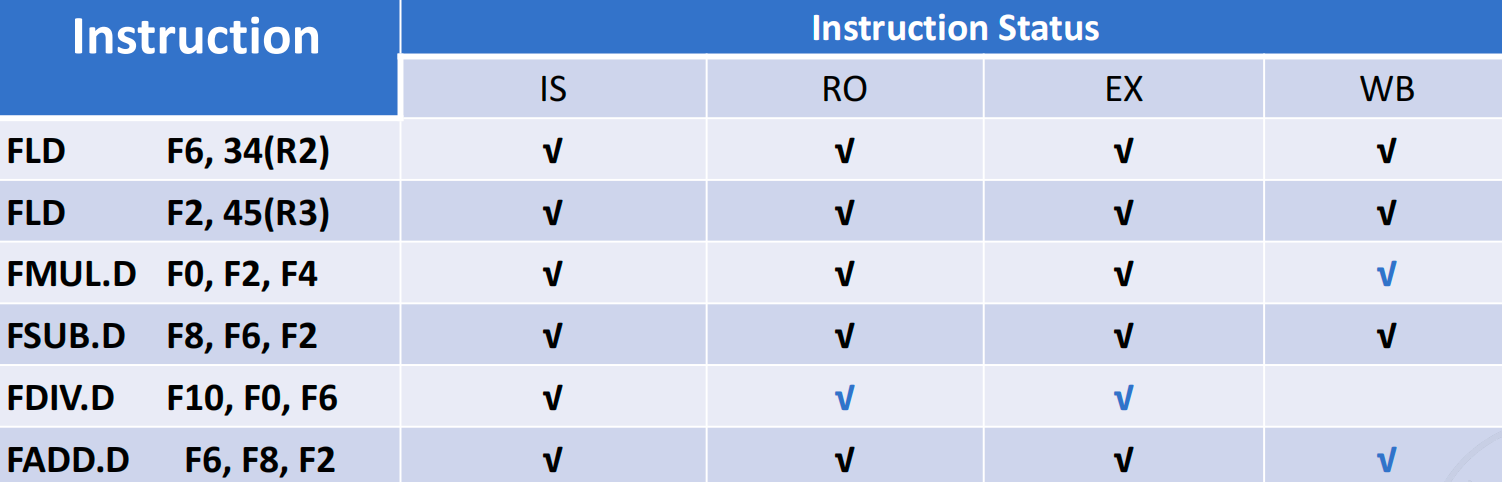
3.2.2 第二阶段¶
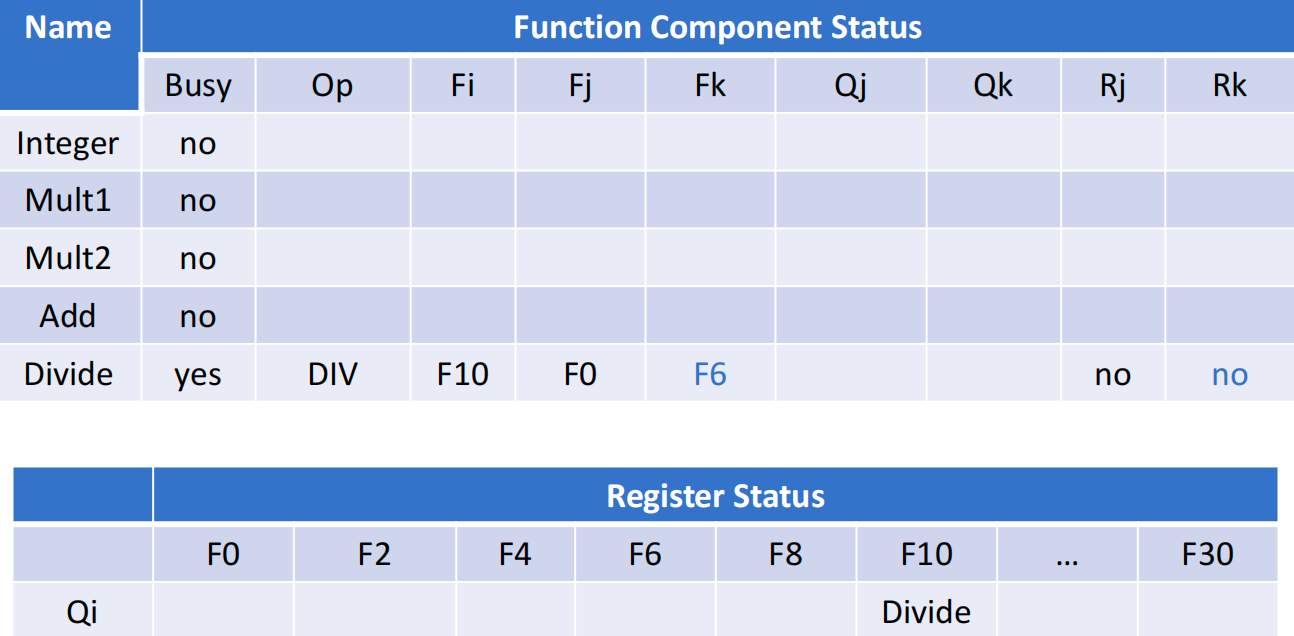
- 指令状态表(假设乘法需要很多拍,还没有写结果)
- FUML卡住了FDIV,而FDIV没有读F6,导致FADD无法写回F6;
- 寄存器状态

- 功能部件状态
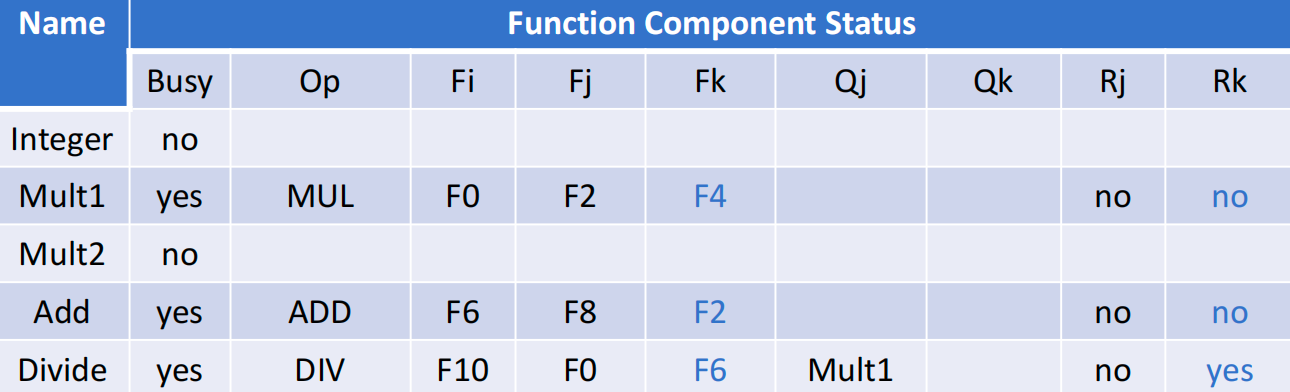
3.2.3 第三阶段¶
- 指令状态表(假设除法还没有写结果)
- 寄存器状态、功能部件状态
4. Tomasulo¶
4.1 作用¶
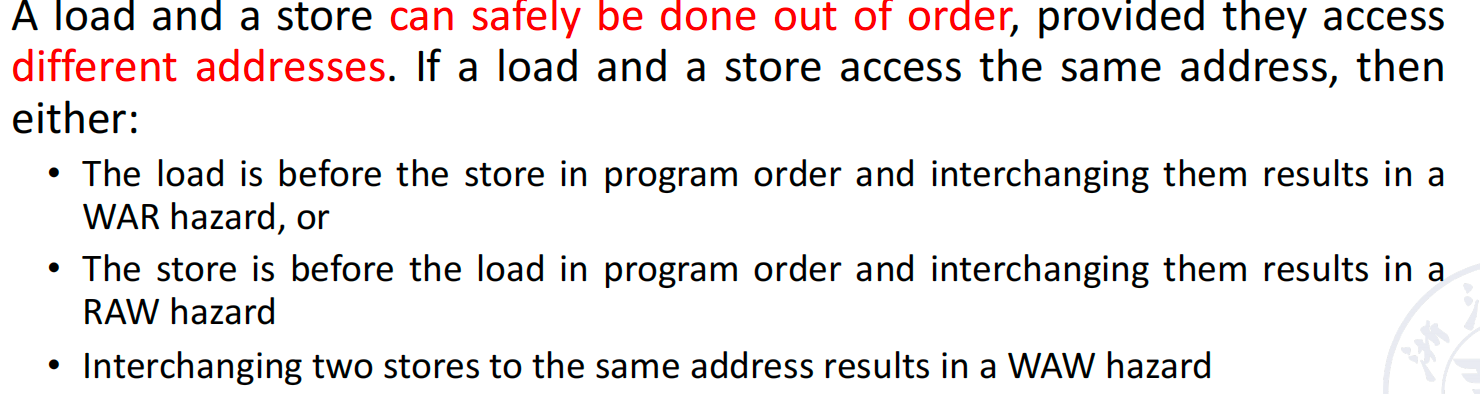
- 解决问题
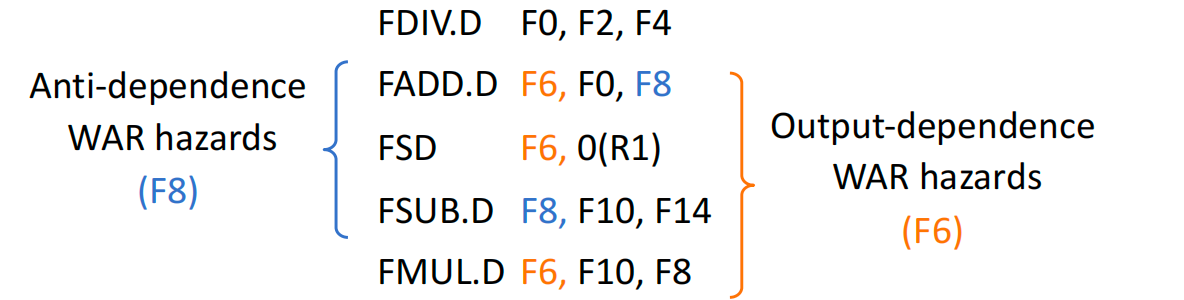
- 反相关;
- 输出相关;
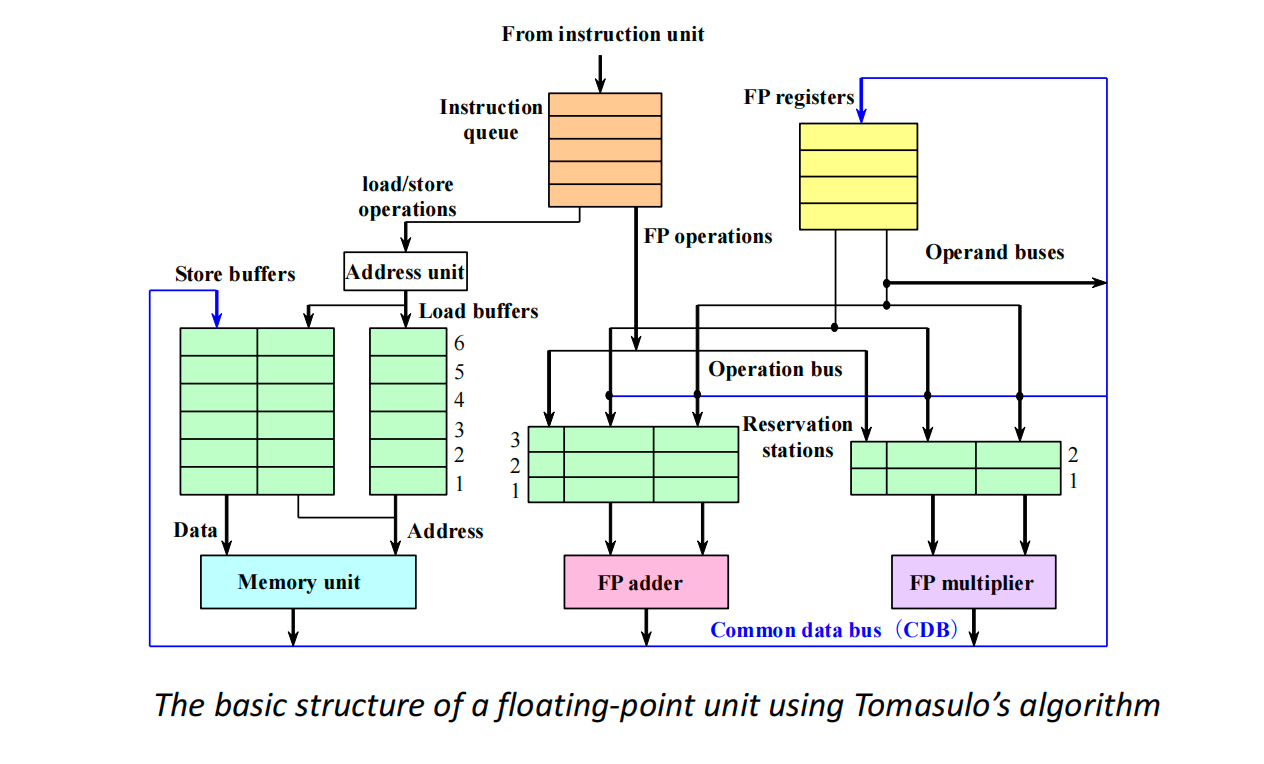
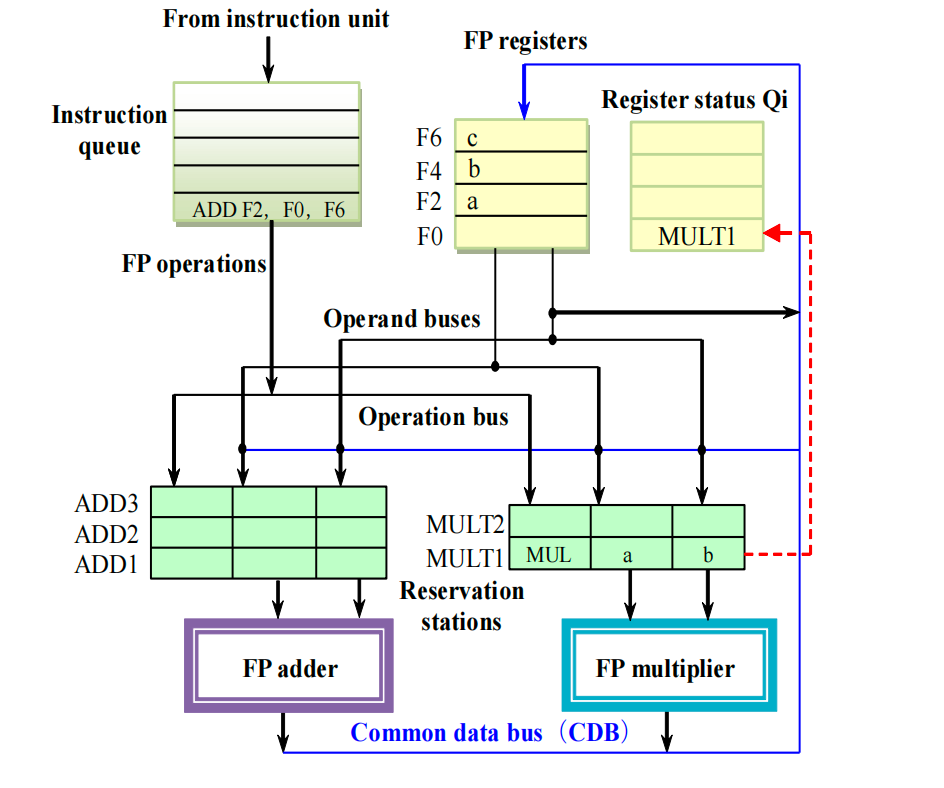
4.2 基本结构¶
对于load和store指令有六个buffer,对于mult指令有两个,对于add指令有三个,运算完后的数据线连到所有部件,给所有需要运用到这个数据的地方分别送过去;
保留栈就是实现乱序的主要结构,什么时候所有源操作数都ready了,先ready先计算,那么就可以从保留栈里面出来进入到运算部件中进行运算;
检测结构冲突就相当于变成了检测保留栈是否有空位,只要进了保留栈,就相当于过了结构冲突的检测,相当于功能部件扩容了,以前只有一条,现在是可以同时拥有保留栈大小的指令(虽然还是只能有一条指令执行);
重命名也是在保留栈完成的,只要之前没有真实的数据依赖,那么进入了保留栈就相当于重命名。
4.3 主要思想¶
-
它跟踪指令操作数何时可用,以减少RAW危害;
-
它在硬件中引入了寄存器重命名,以最小化WAW和WAR的危害;
4.4 过程¶
把一条指令的执行过程分成三步:
- Issue(可以重命名寄存器,消除WAR和WAW的影响)
- 从指令队列拿出指令(FIFO);
- 如果保留栈有空位,那么将指令放进去;
- 如果没空位,则结构冲突,等待知道有空位;
- 如果操作数不在寄存器里,就要追踪那些会产生这些操作数的功能部件;
- Execute
- 当所有的操作数都有了,就可以在对应的功能部件进行执行了;
- PS:load和store需要两个步骤
- 首先判断base register是否就绪,并计算地址;
- 把计算后的有效地址放到loadstore的buffer里;
- Write results
- 当结果计算出来后,就通过CDB总线传输到所有需要这个结果的保留栈(包括store buffer)和寄存器中;
- store指令在store buffer中等待,直到要存储的值和存储地址都可用,然后在内存单元可用时立即写入结果
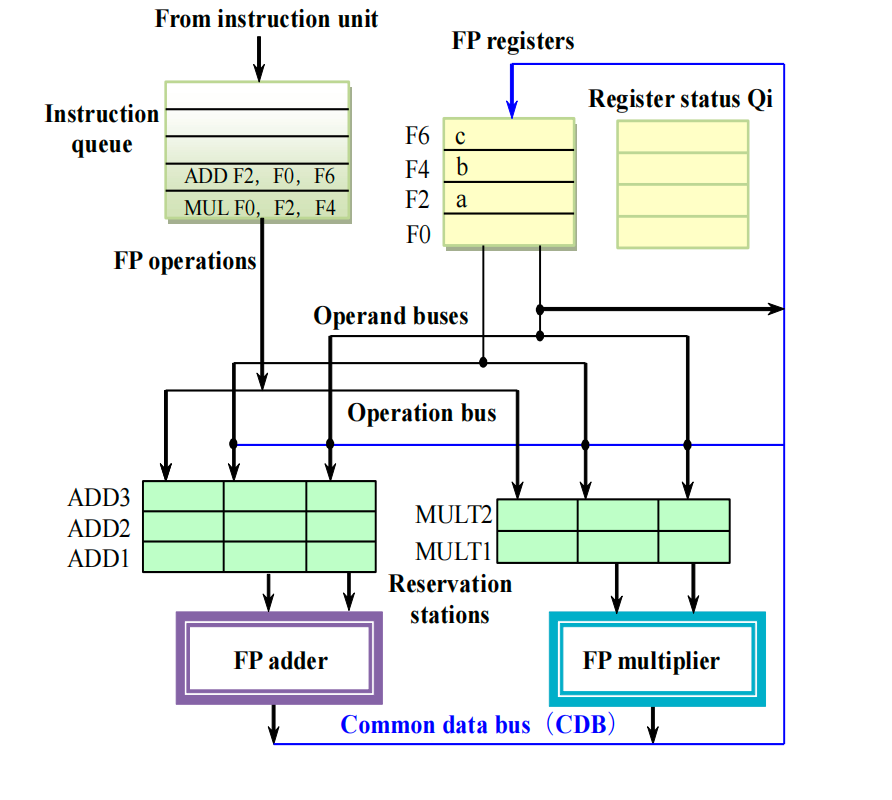
4.5 Example¶
-
-
分析:MUL指令的F2和ADD的F2没有关系,F0有关系;
-
MUL进入保留栈,结果是MULT1(通过结果寄存器识别)
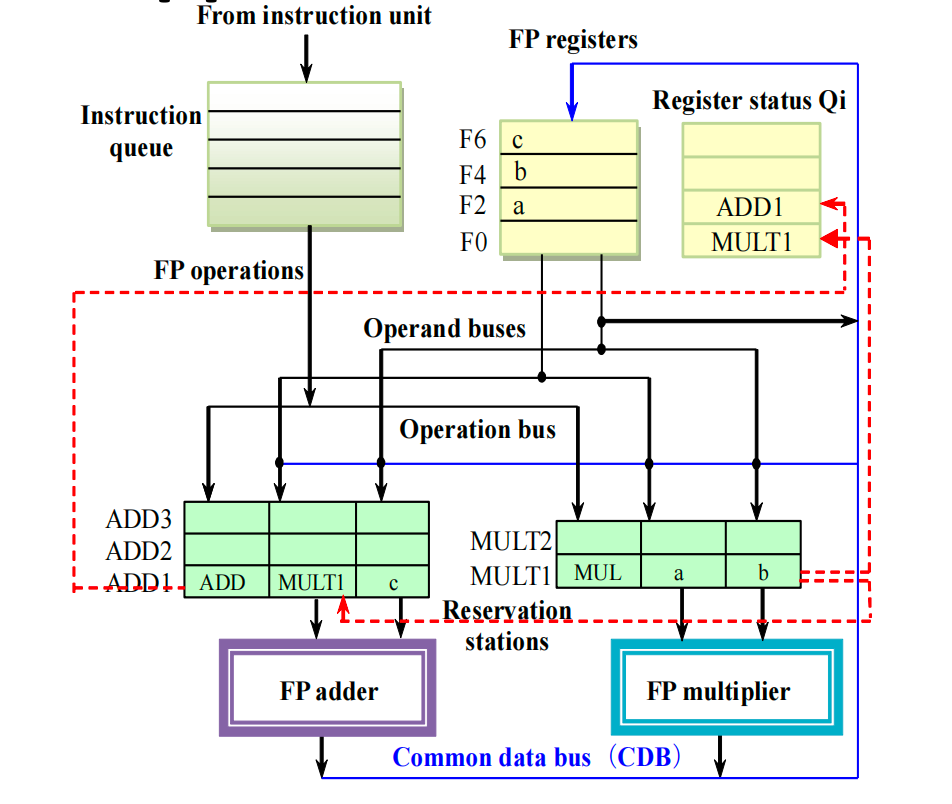
-
ADD的MULT1直接从运算部件里来,而不是从F0里来
-
当MUL的WB写完了之后,F0和ADD里同步变成了e;
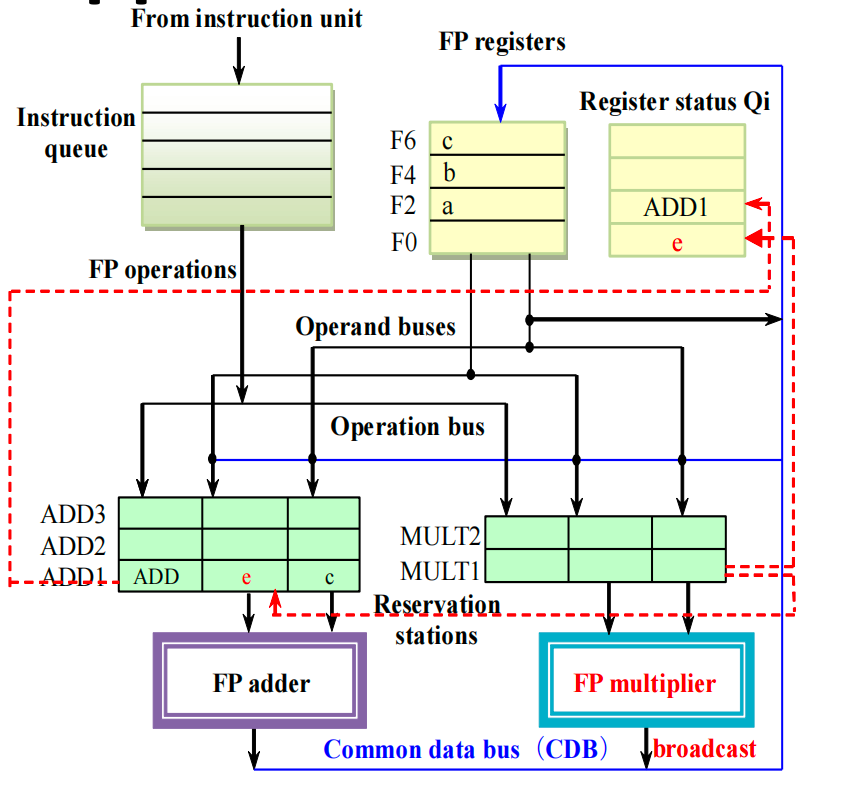
-
现代计算机中会增加多条CDB来改善性能;
4.6 三张表记录信息¶
-
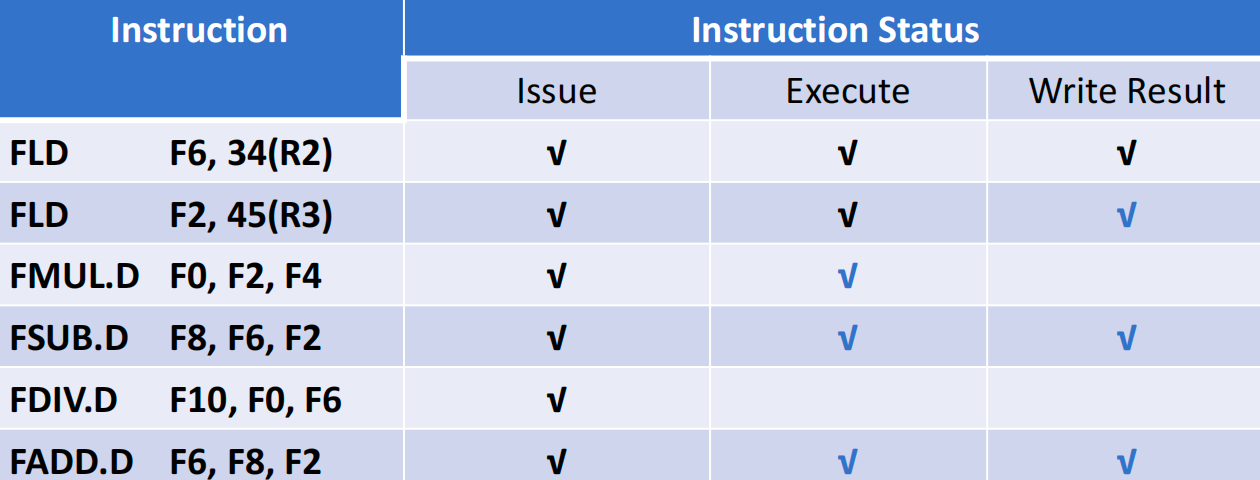
指令状态表
-
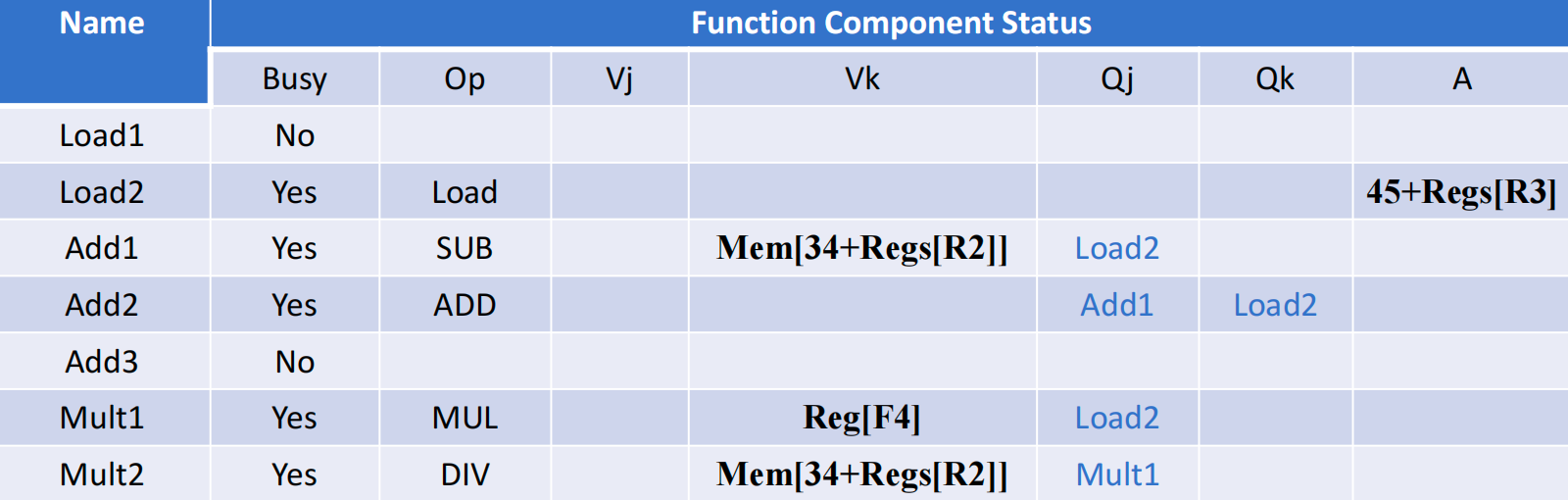
保留栈状态表(对应于scoreboard中的功能部件表)
- Op:当前的操作;
- Qj, Qk:表示从哪个功能部件来;
- Vj, Vk:源操作数的value;
- Busy:保留栈位置是否被占用;
- A:对于load和store,记录memory的地址;
-
结果寄存器状态表(Field Qi)
4.6‘ 一个例子¶
-
假设第一条指令已经执行完,第二条指令还没写回;
- 指令状态表:
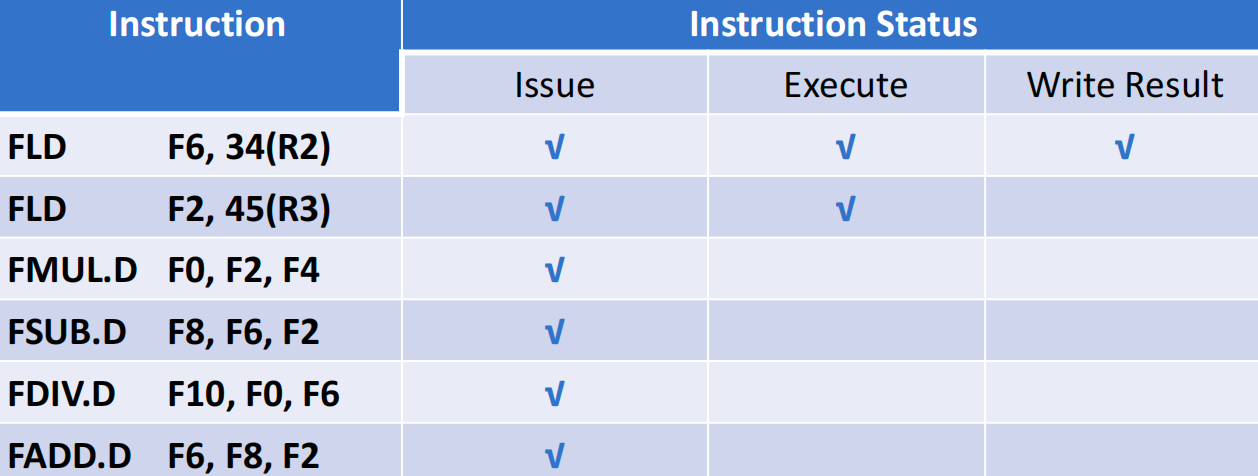 三四六要等F2,五要等F0;
三四六要等F2,五要等F0; - 保留栈状态表:
- 寄存器状态表:

- 指令状态表:
-
假设第二条指令load已经执行完了,乘法指令还没有写结果,除法要等F0;
- 指令状态表:
- 保留栈状态表:
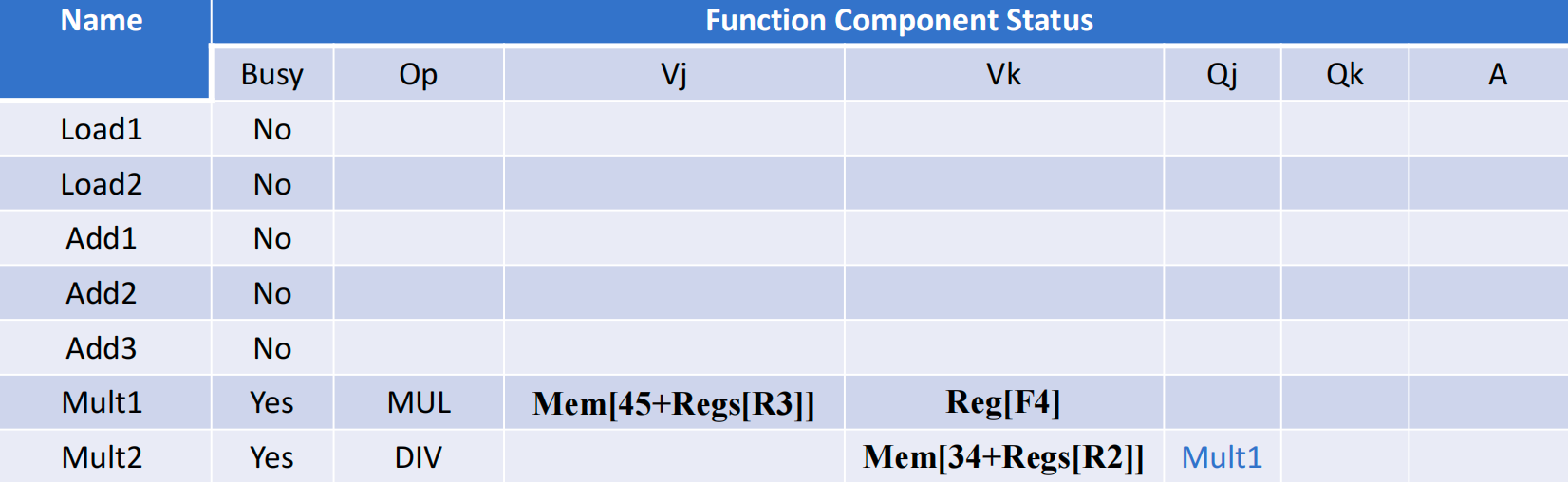
- 寄存器状态表:

- 指令状态表:
5. 总结¶
-
Tomasula算法优点:
- Dynamic scheduling;
- Register renaming---eliminatining WAW and WAR hazards;
- Load/store disambiguation;
- Better than Scoreboard Algorithm;
-
缺点:
- 结构比较复杂;
- Its performance is limited by Common Data Bus;
-
ILP方法的局限性直接导致了多核技术的发展;
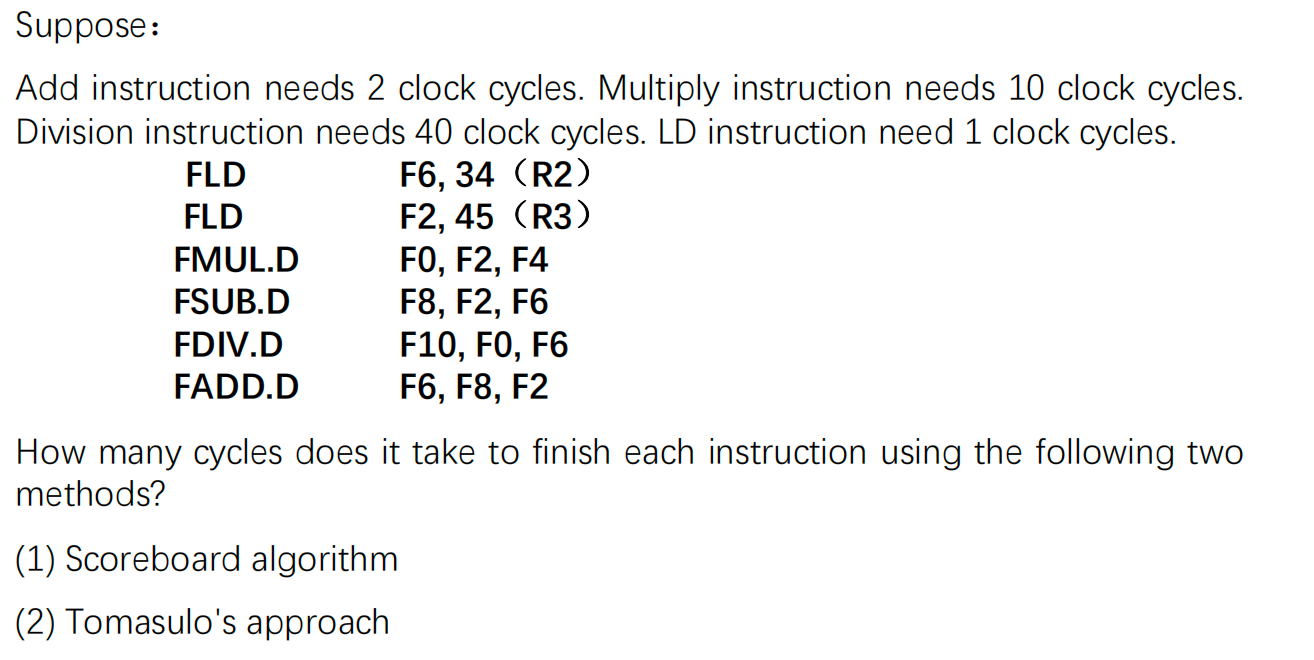
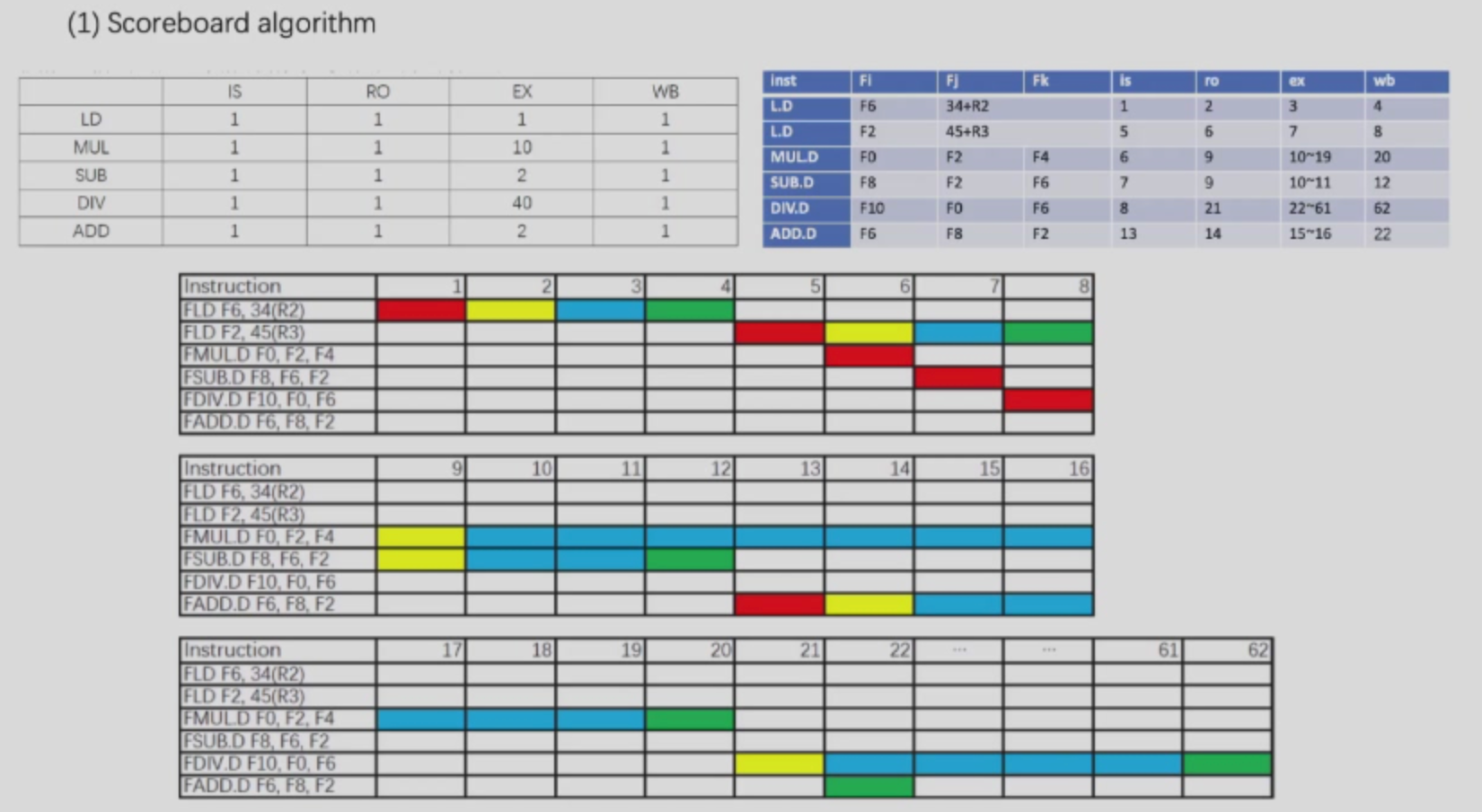
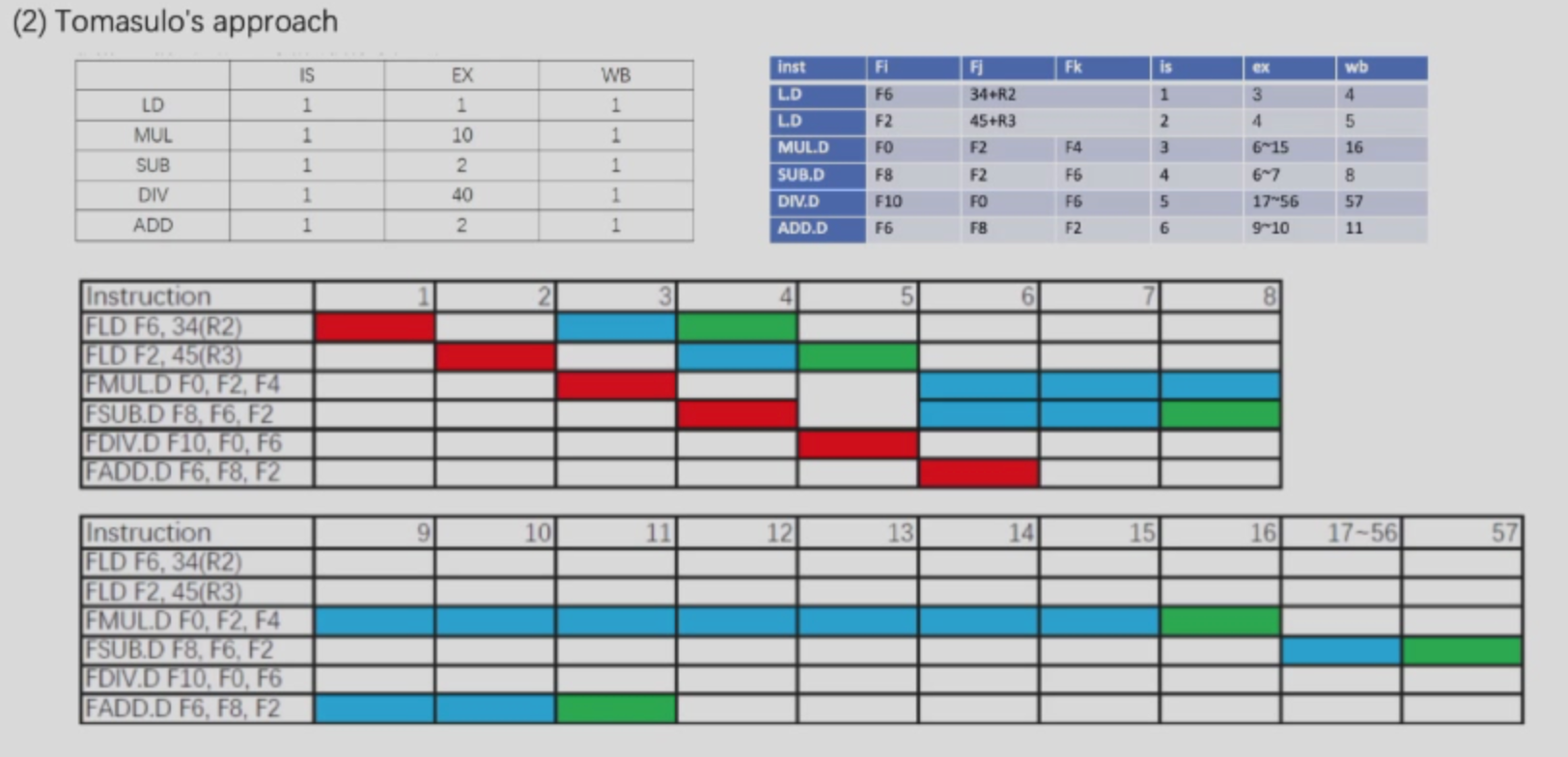
6. Homework¶
本文总阅读量次