第九课 机器人运动学和坐标变换
约 271 个字 25 张图片 预计阅读时间 1 分钟
课程回顾¶
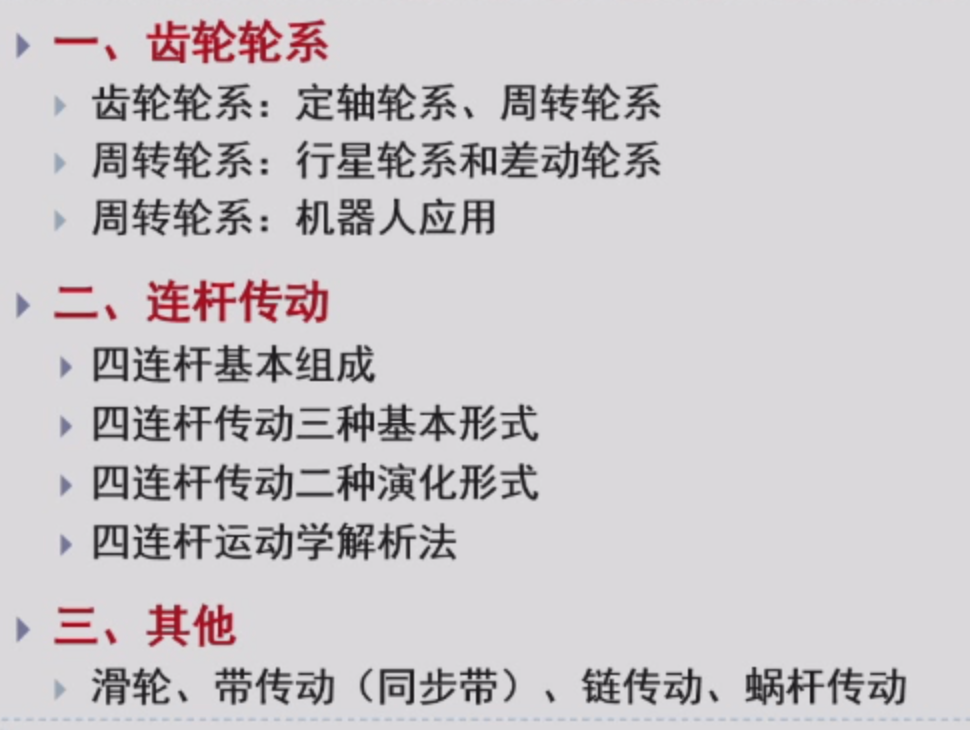
机器人机械设计¶
1. 机械设计——轴系和链接¶
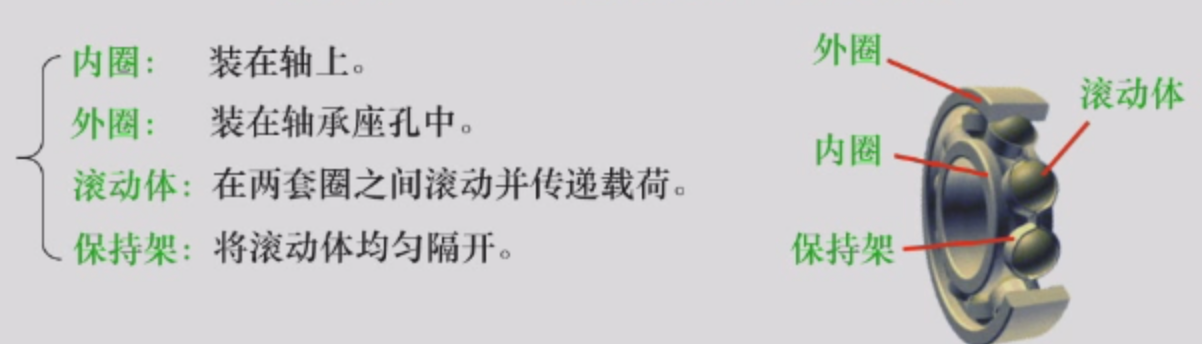
1.1 轴系设计——滚动轴承¶
- 作用:用来支撑轴;(滚动摩擦代替滑动摩擦)
- 滚动轴承是标准件,非常精密;
- 特点:旋转精度高、气动力矩小、是标准件,选用方便;
-
组成:
-
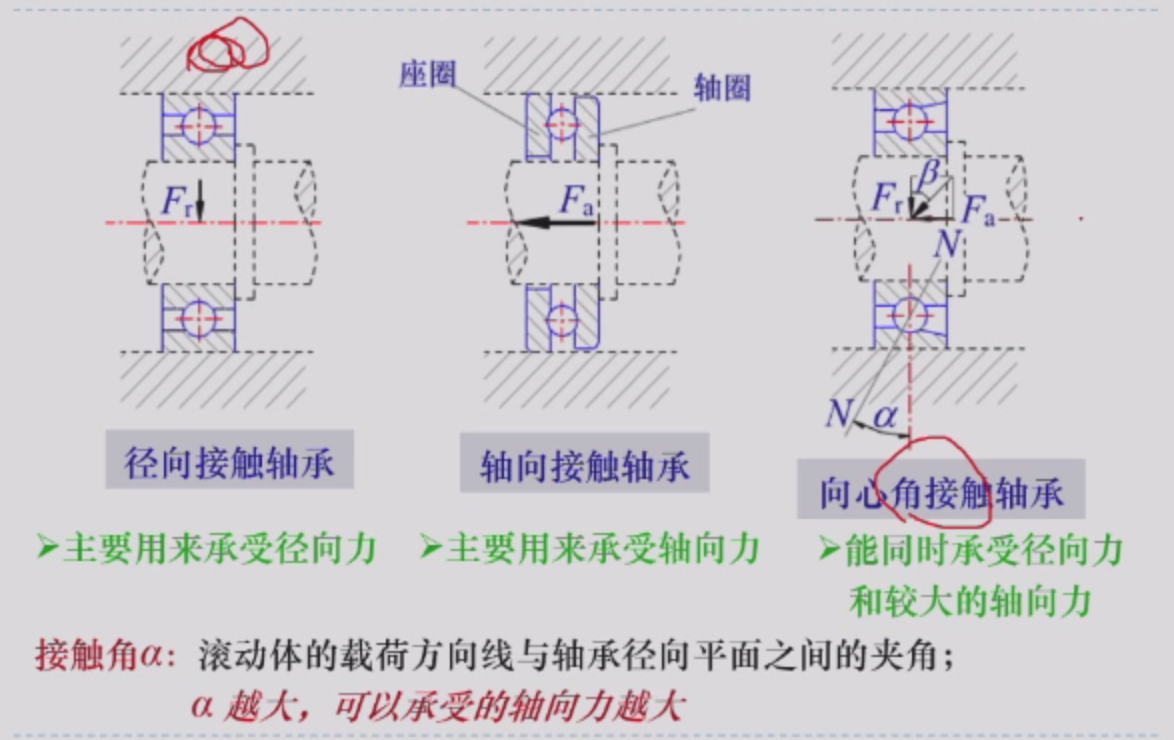
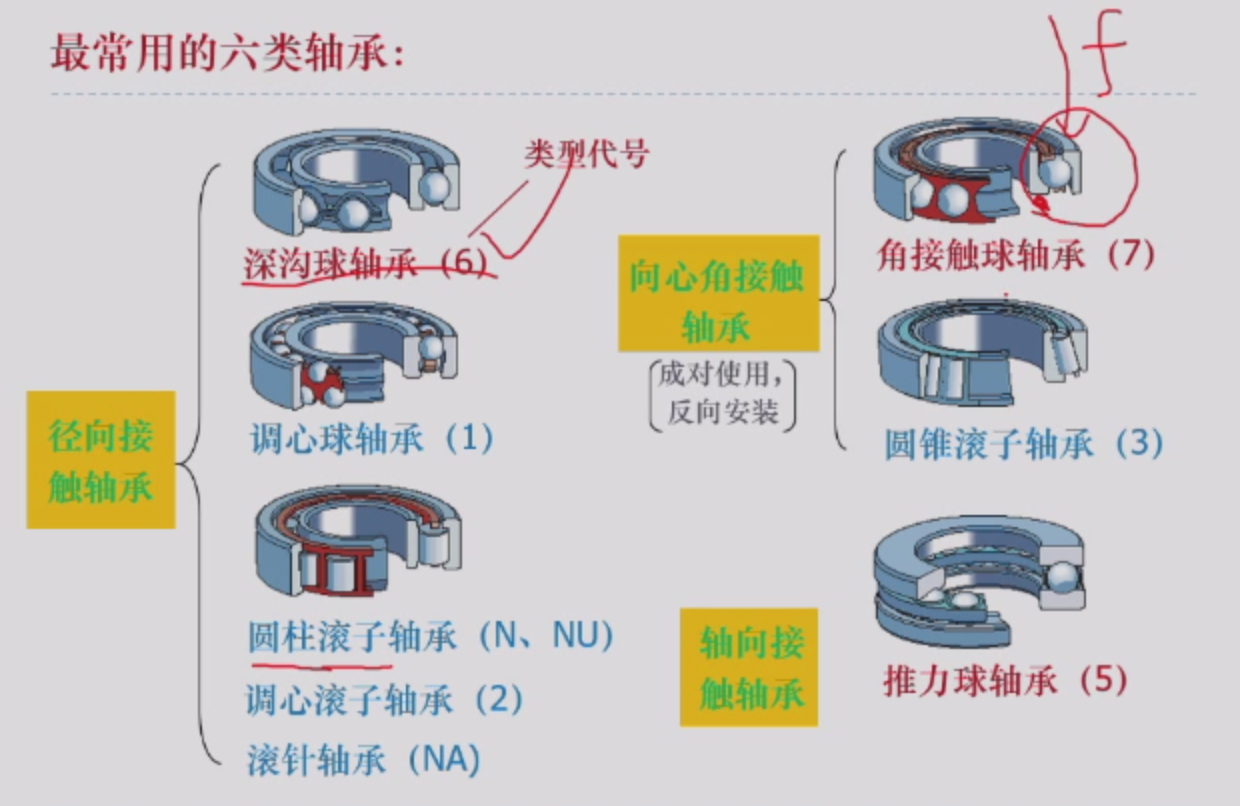
按照可承受的荷载方向不同,滚动轴承分为三类(但是径向接触轴承其实可以承受一定的轴向力):
-
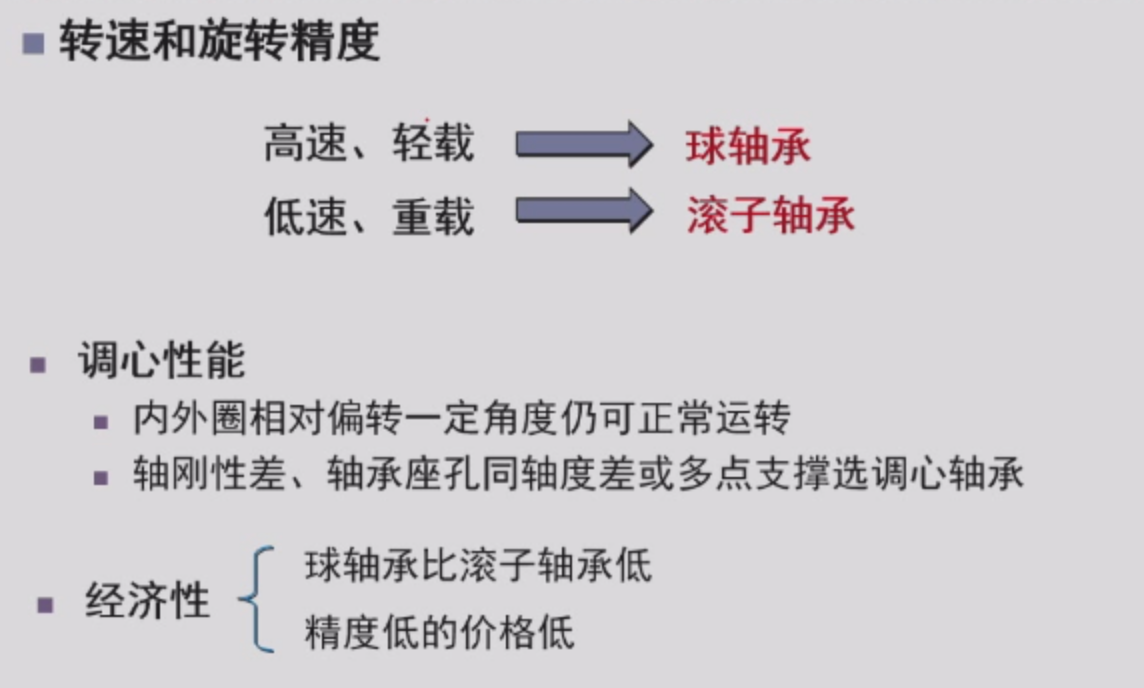
选择:
-
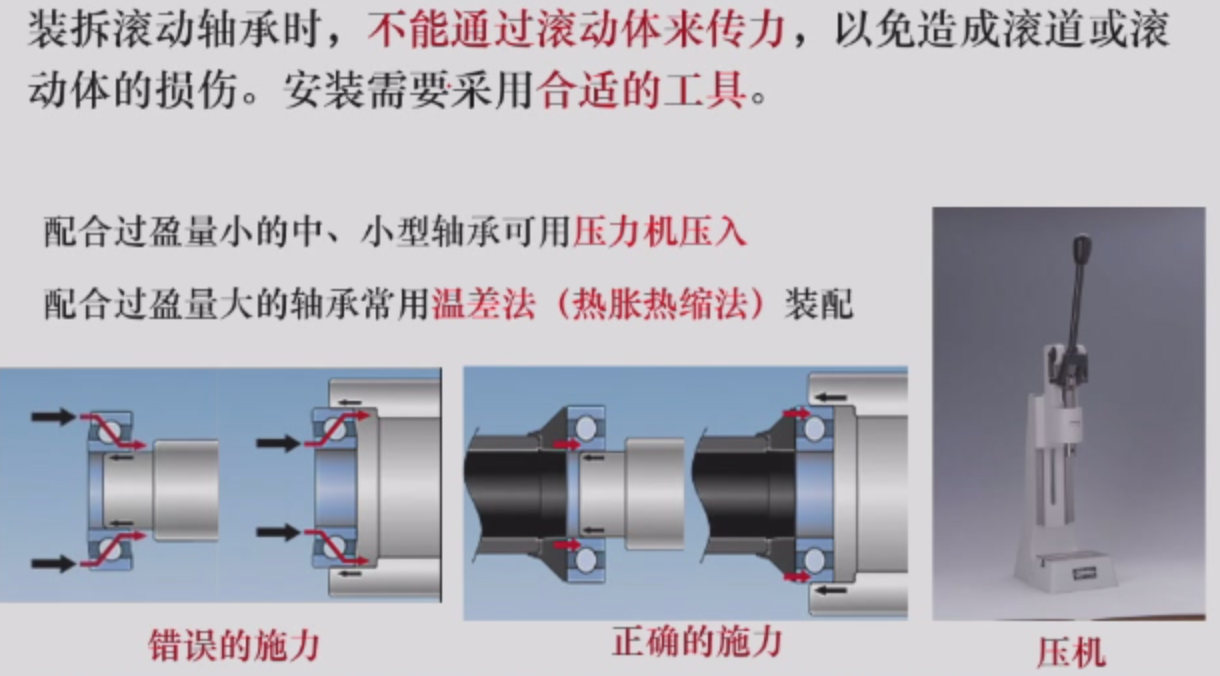
滚动轴承的安装:
-
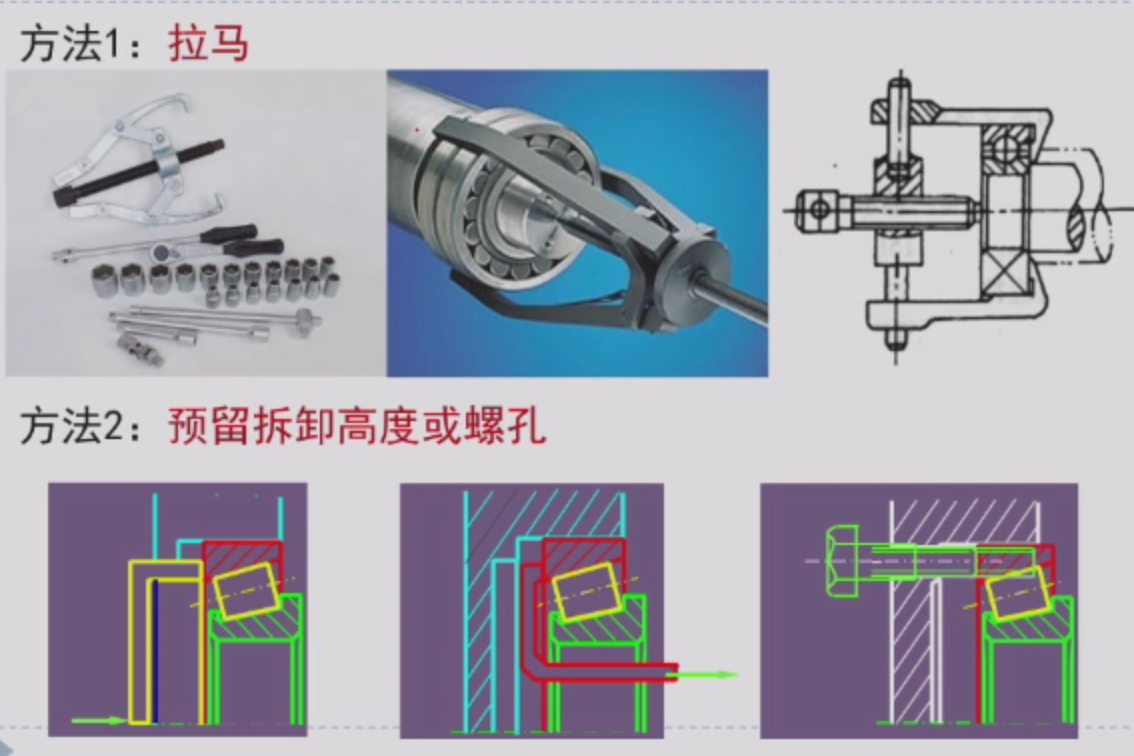
滚动轴承的拆卸:
-
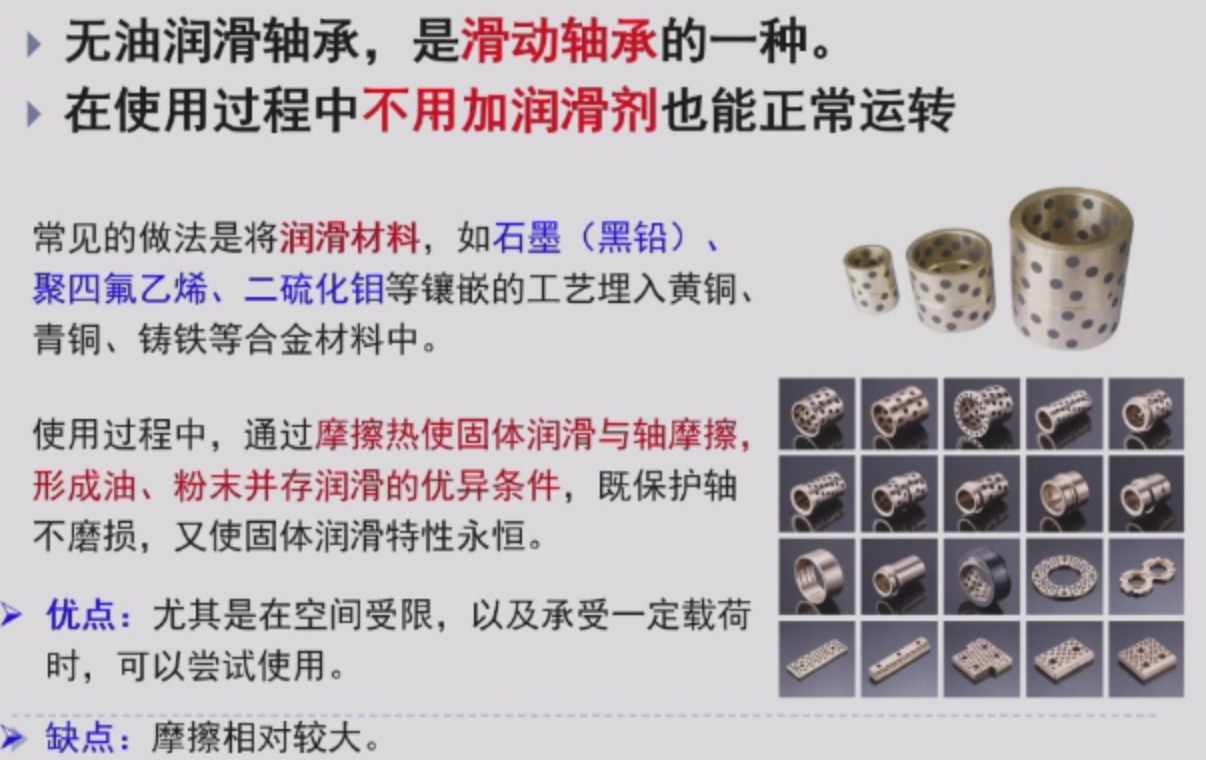
无油润滑轴承:
-
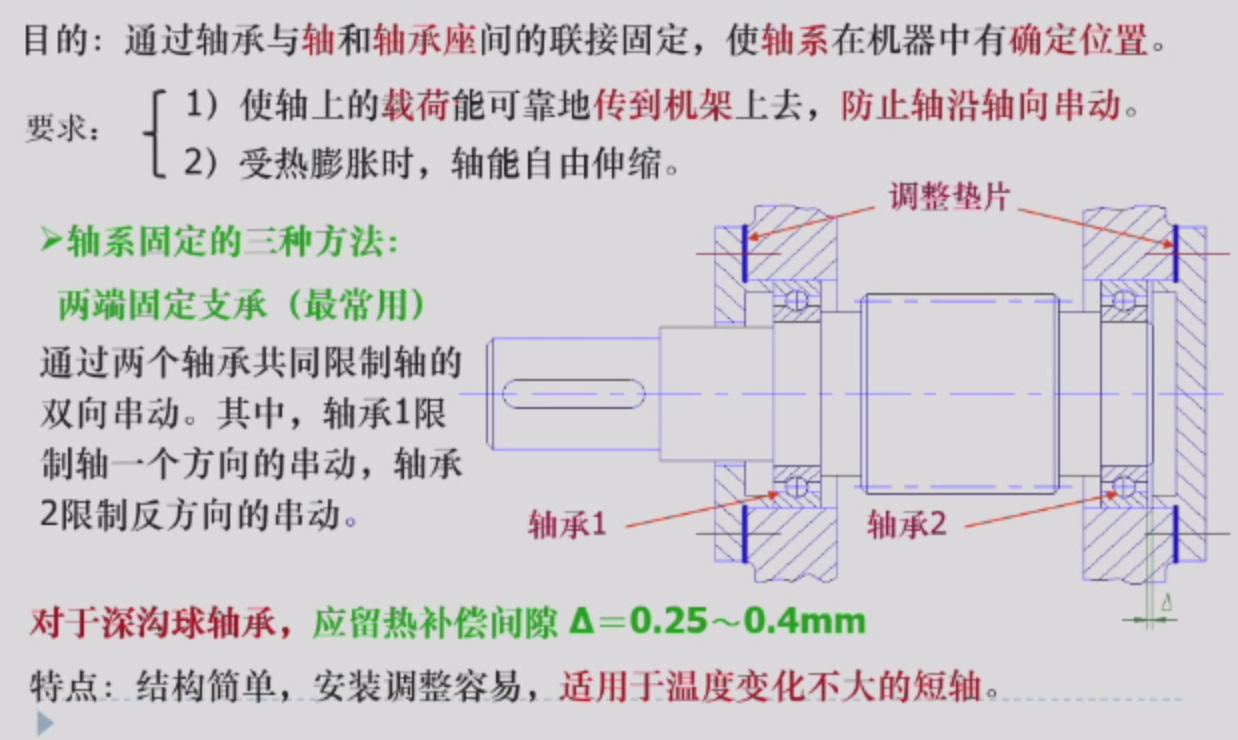
轴承的安装与固定
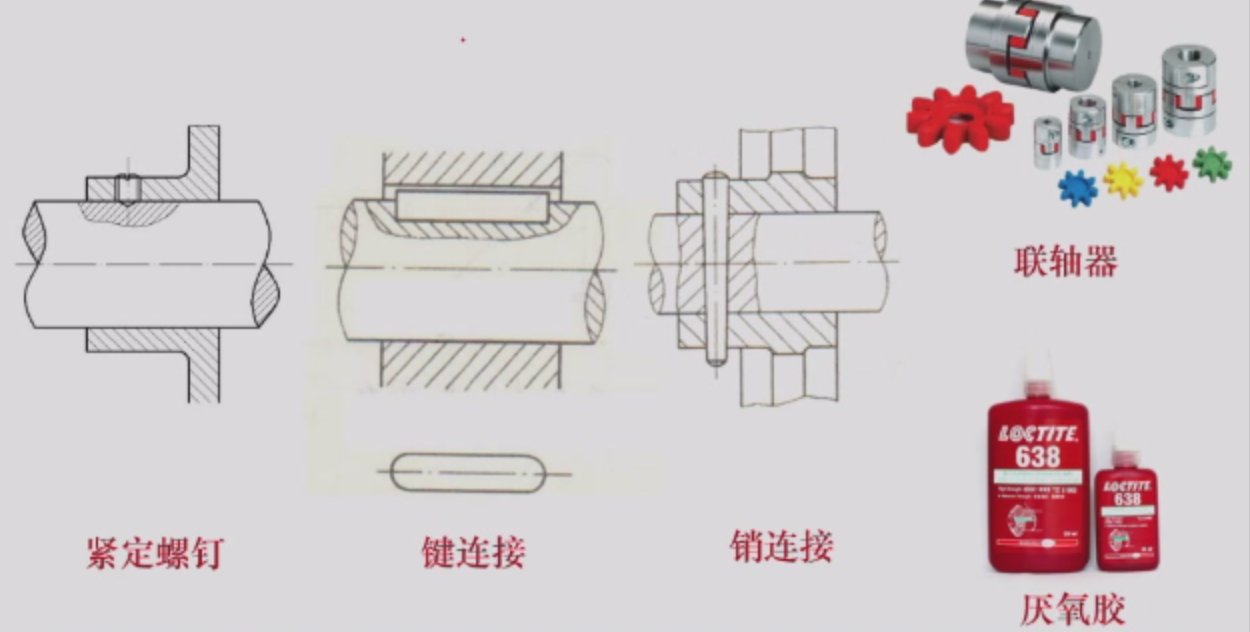
1.2 轴系设计——联接(轴向固定)¶
- 轴在轴向上的固定
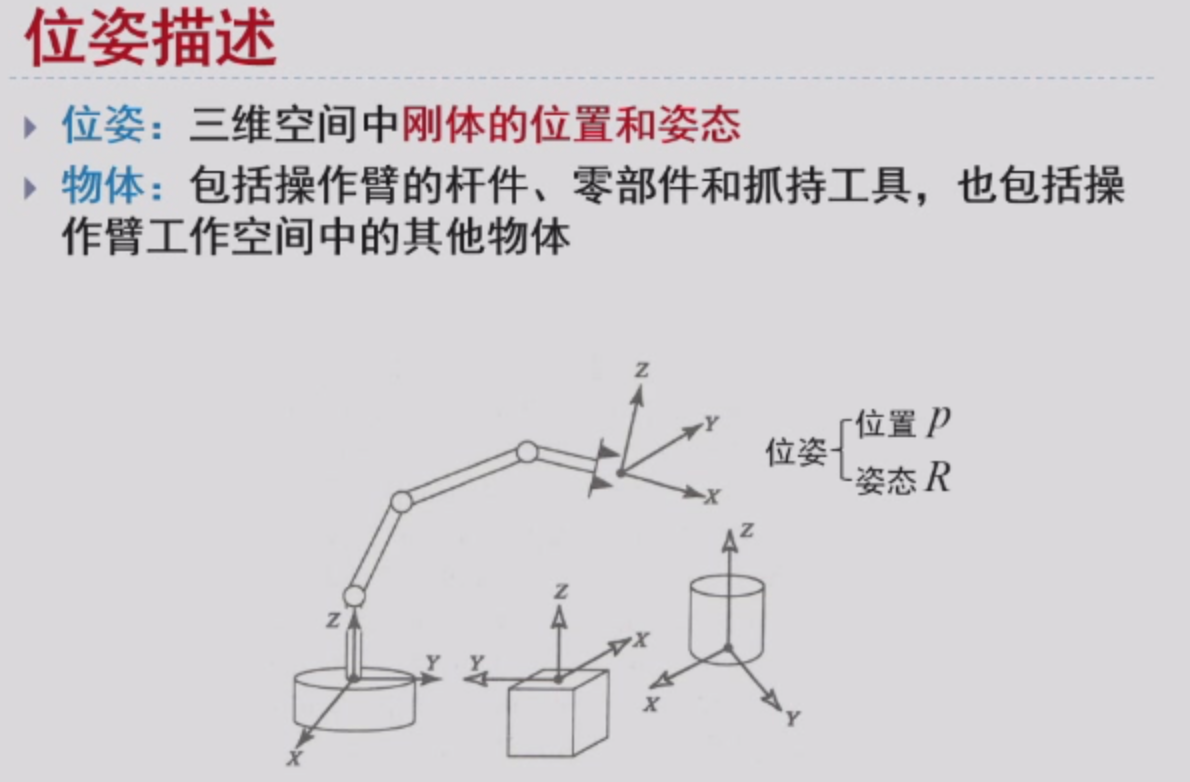
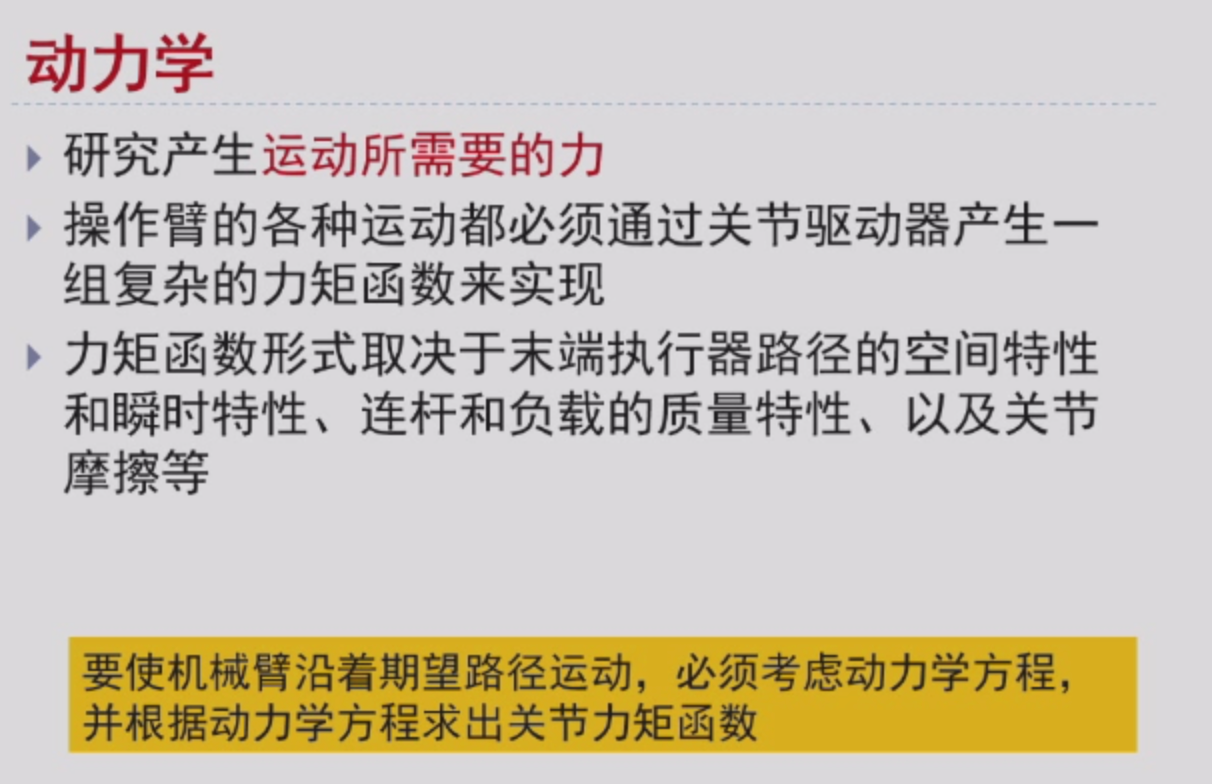
机器人运动学¶
- 分类:平面四连杆运动学、三维机器人运动学
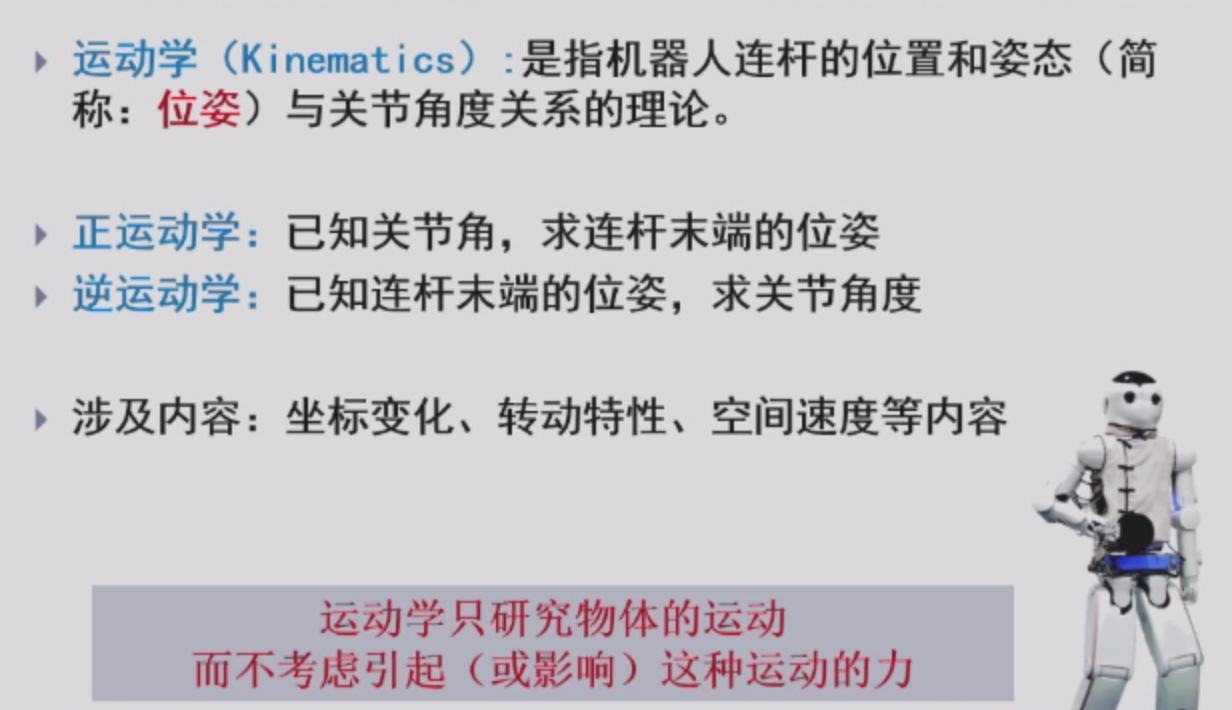
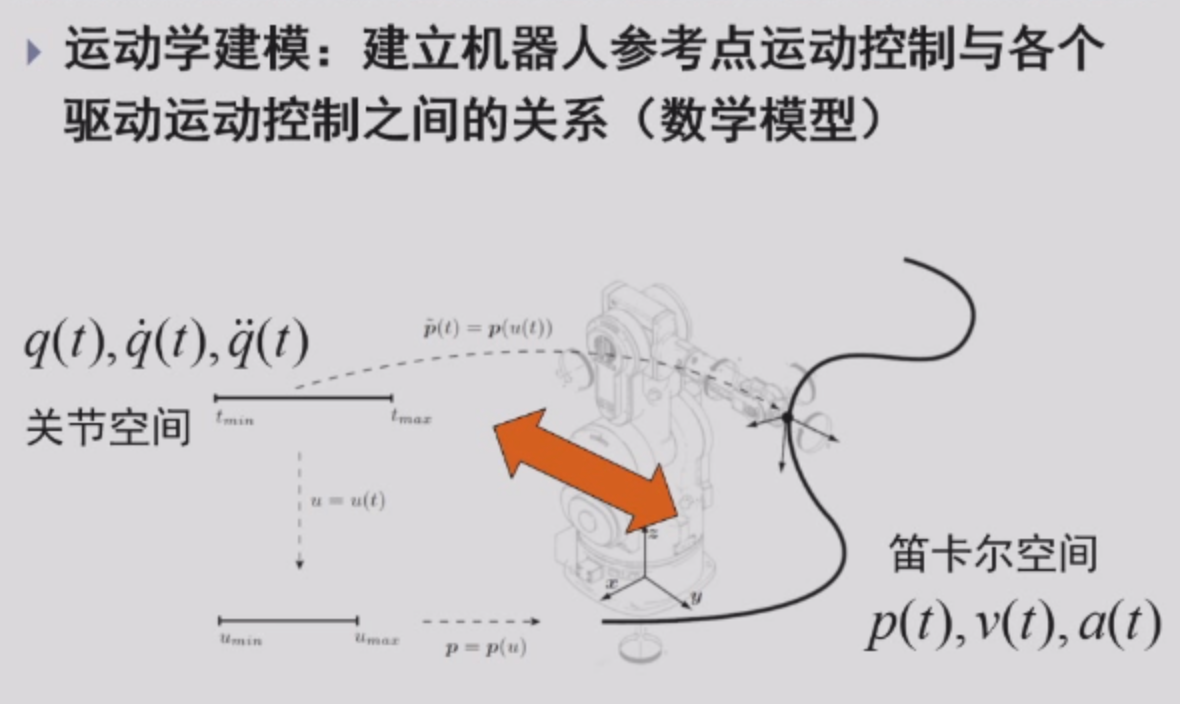
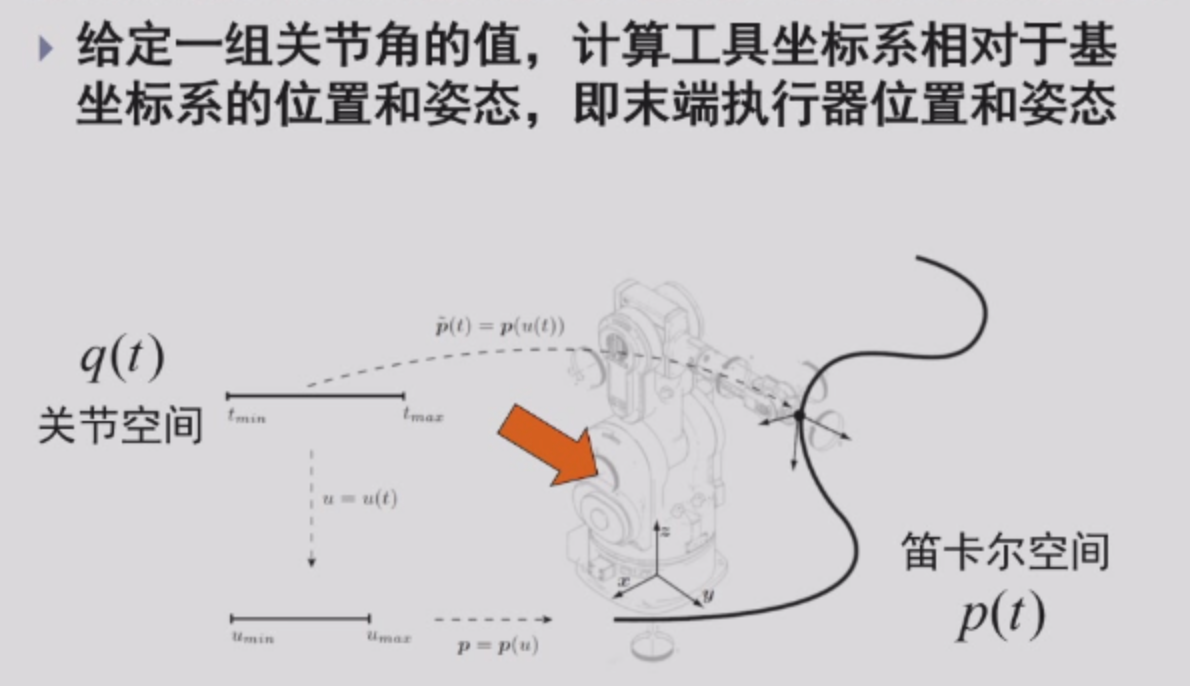
- 正运动学
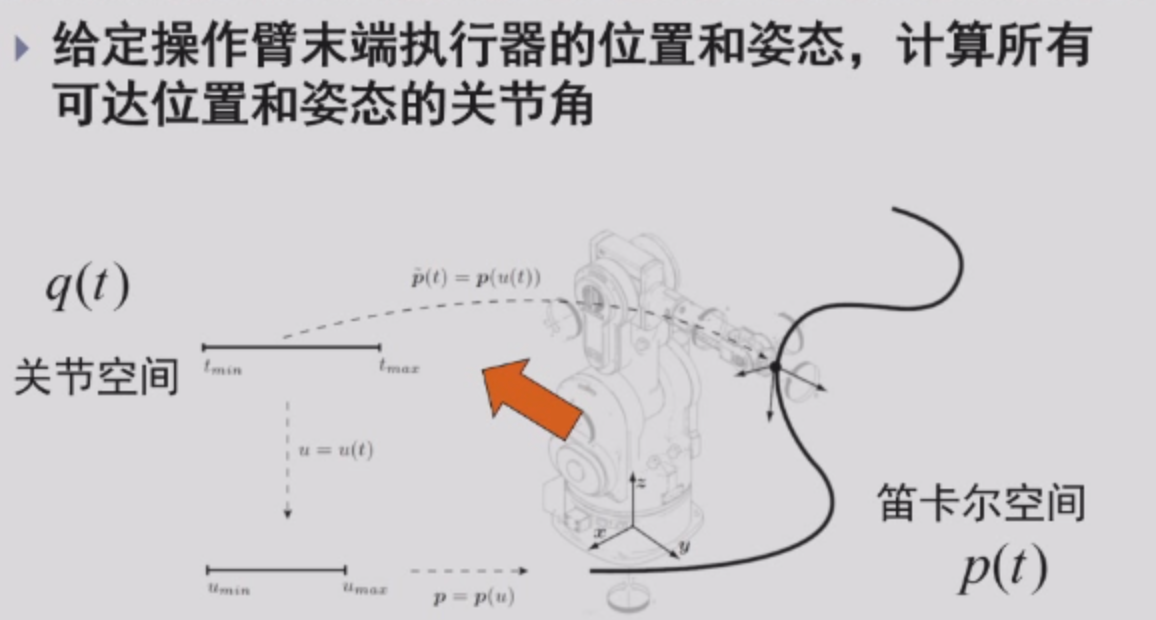
- 逆运动学
路径没有时间概念,轨迹有时间概念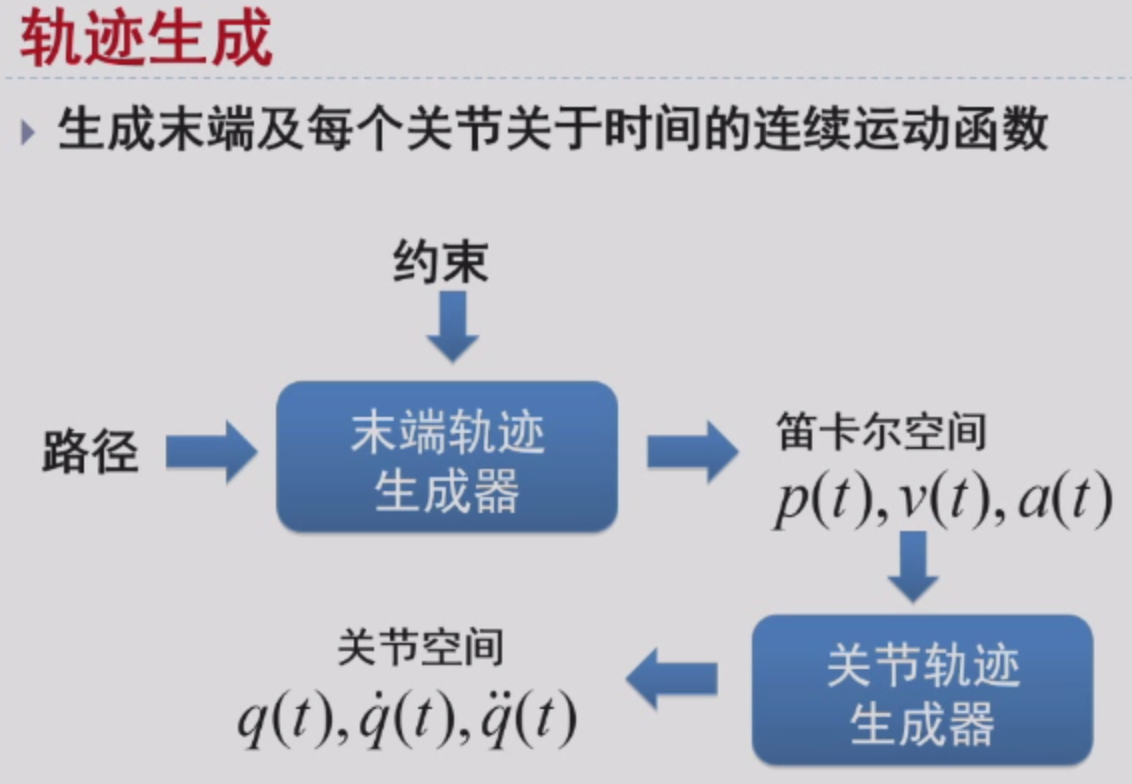
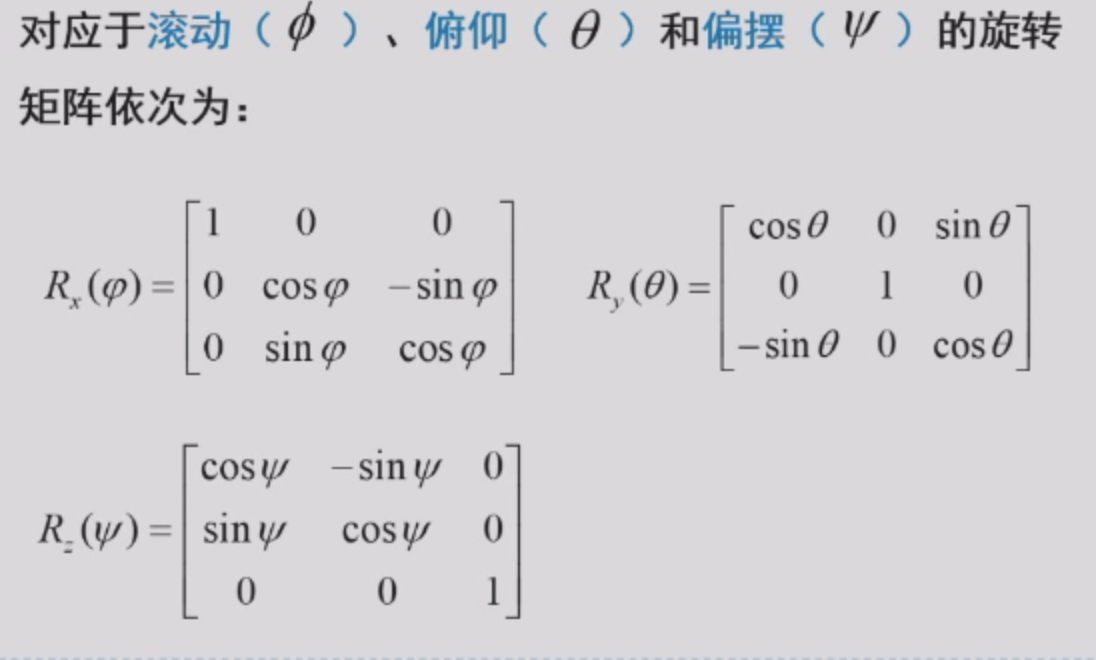
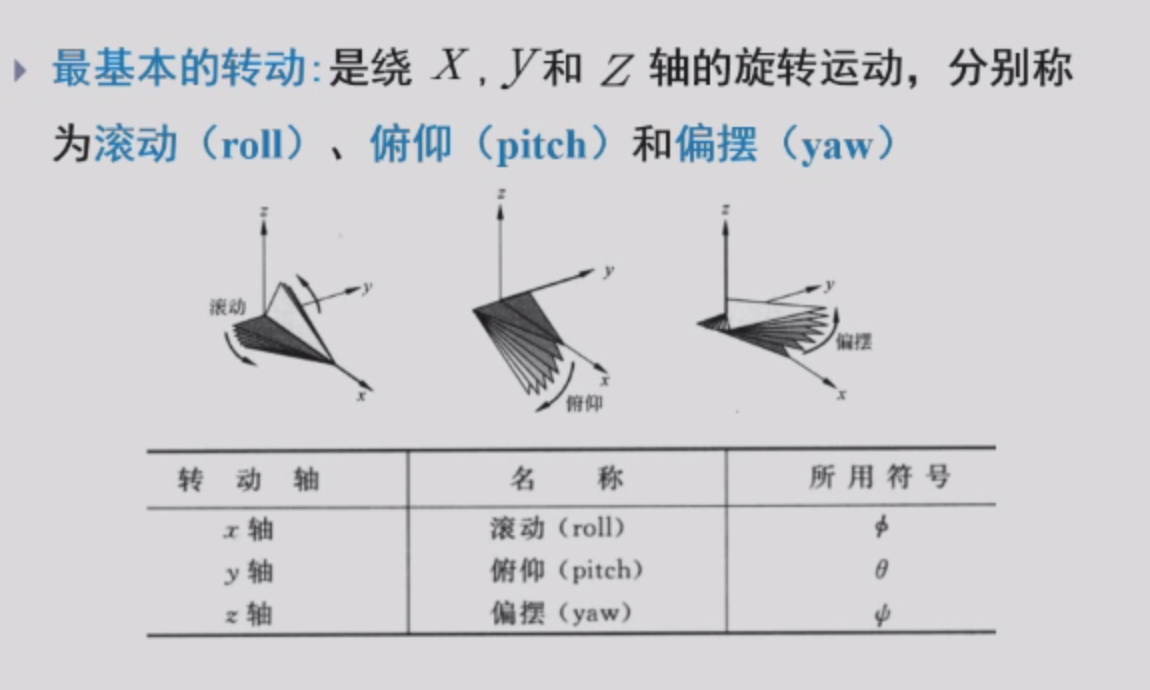
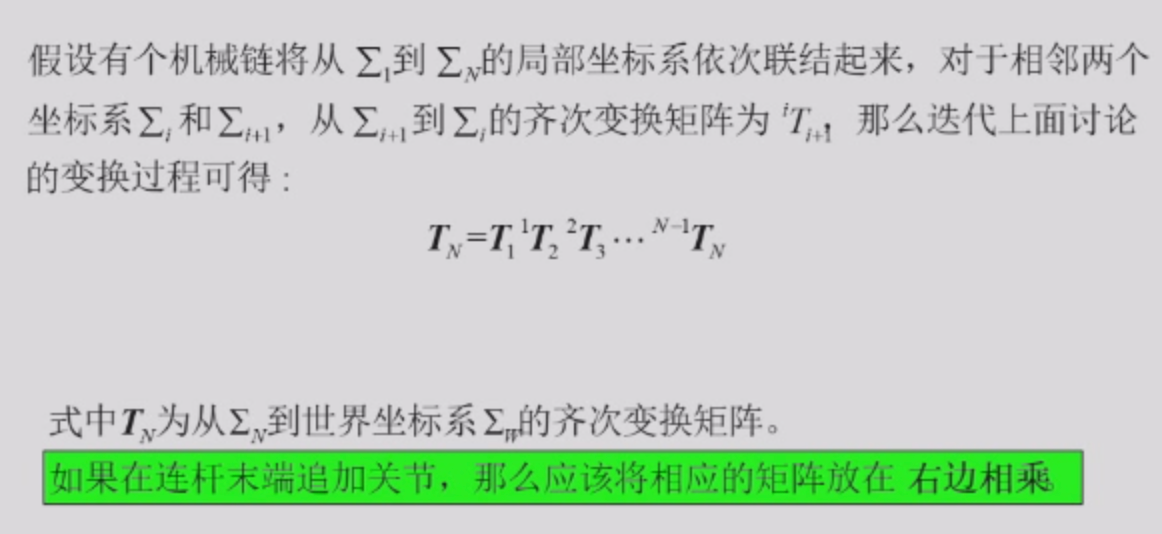
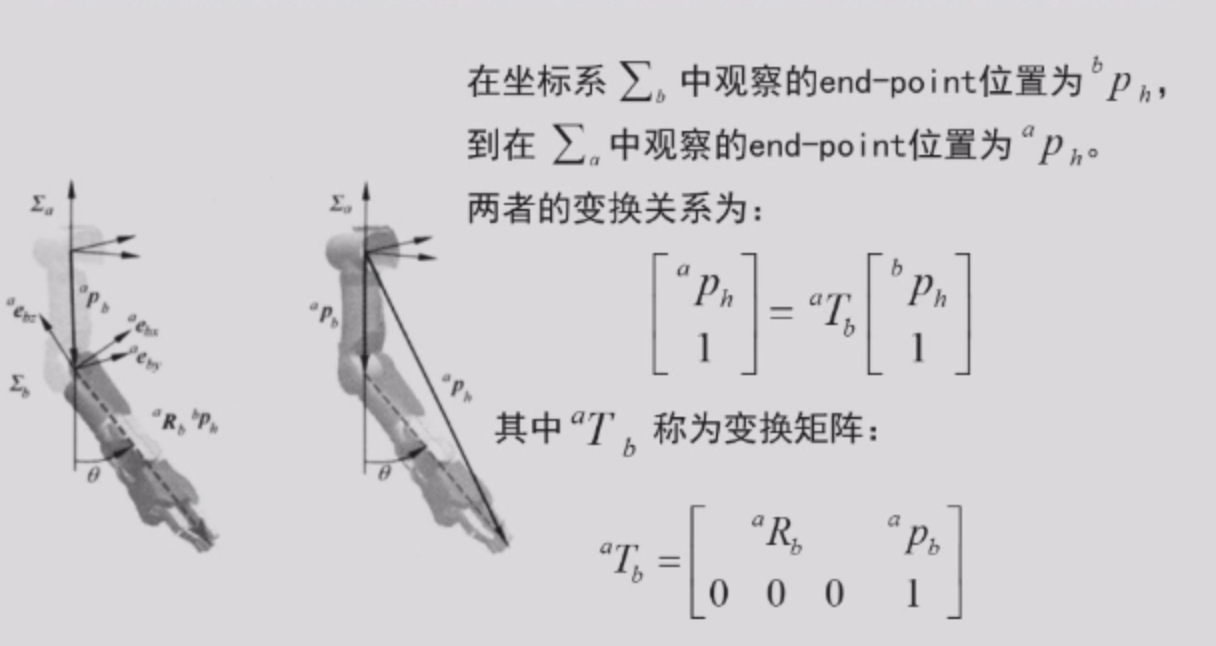
坐标变换(重点!)¶
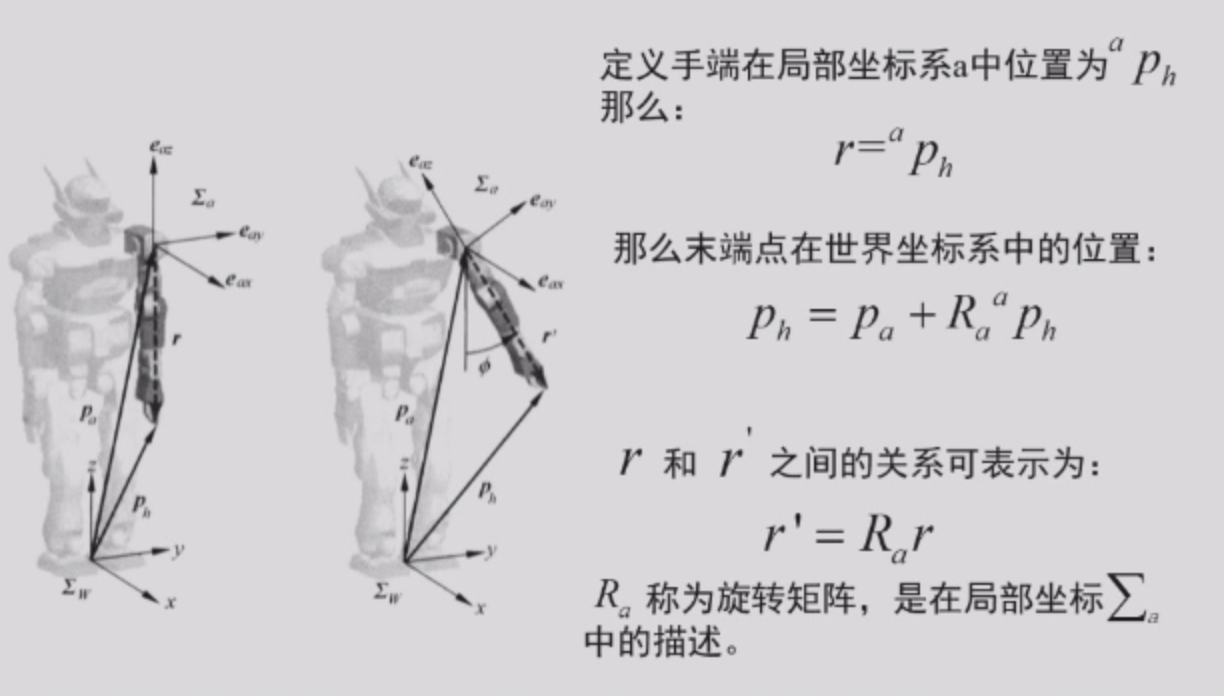
-
考试会考,但是不需要把这个东西记住,会给出公式
 如果只有两个,那么不动的维度角度为0代进去
如果只有两个,那么不动的维度角度为0代进去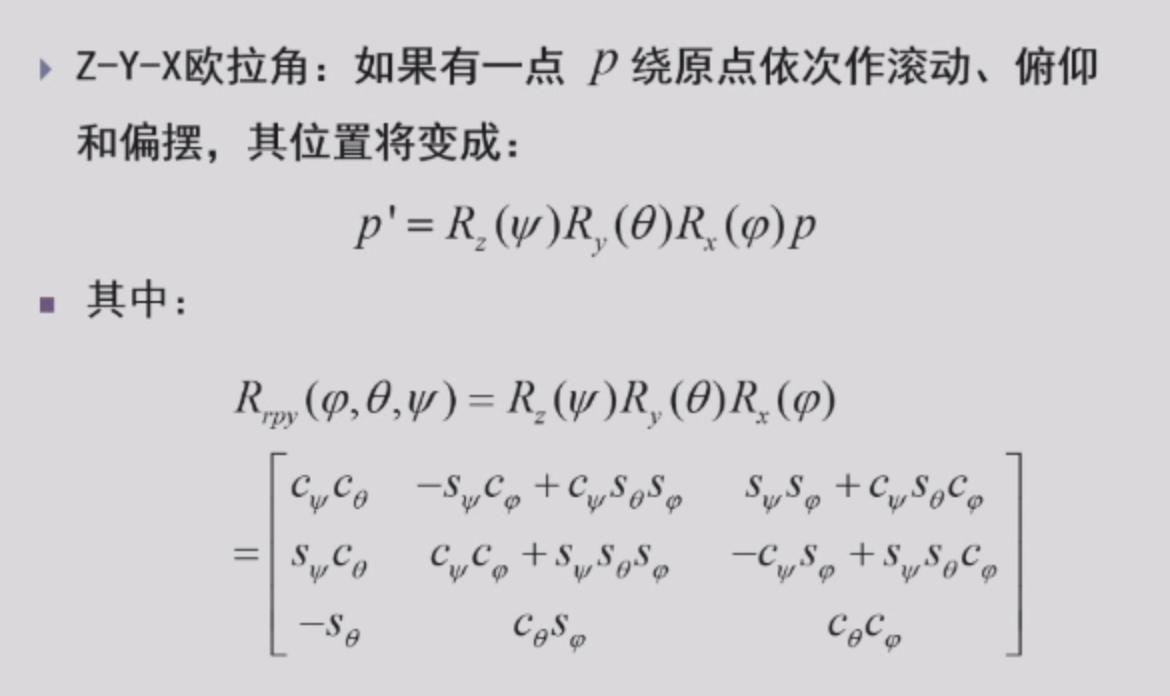
-
转动特性
-
坐标变换
本文总阅读量次