第八课 机器人设计与传动-2
约 373 个字 25 张图片 预计阅读时间 1 分钟
4. 齿轮轮系¶
定轴轮系¶
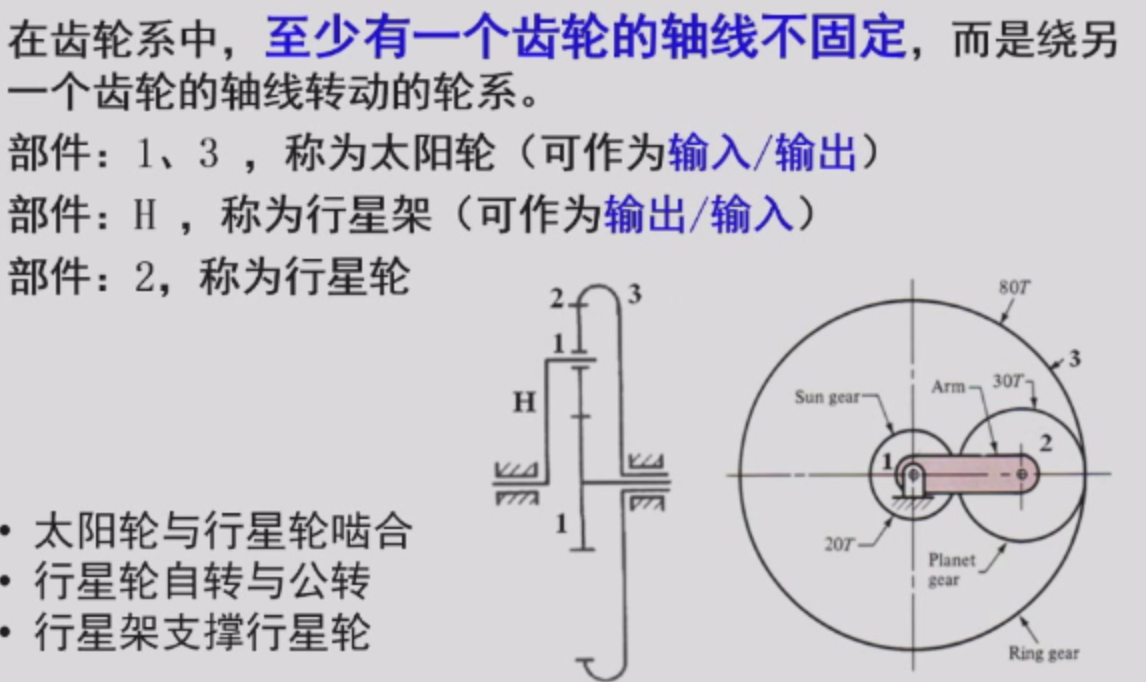
周转轮系¶
-
-
2和1通过行星架连接,2和3通过内啮合传动;
-
-
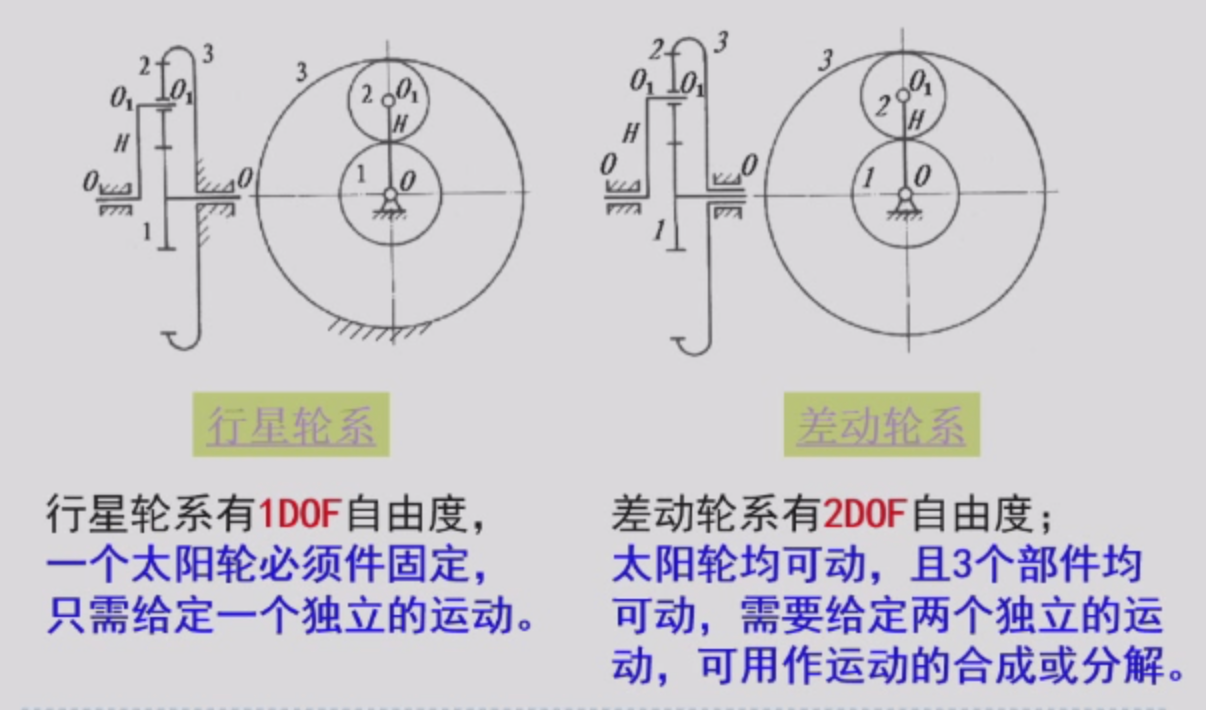
行星轮系:1输入、H输出或者H输入、1输出;
-
差动轮系:需要运动的合成与分解;
-
-
减速比的计算和转向方向没讲;
- 讲了一下行星轮的应用,没听懂……
机器人设计与传动-2¶
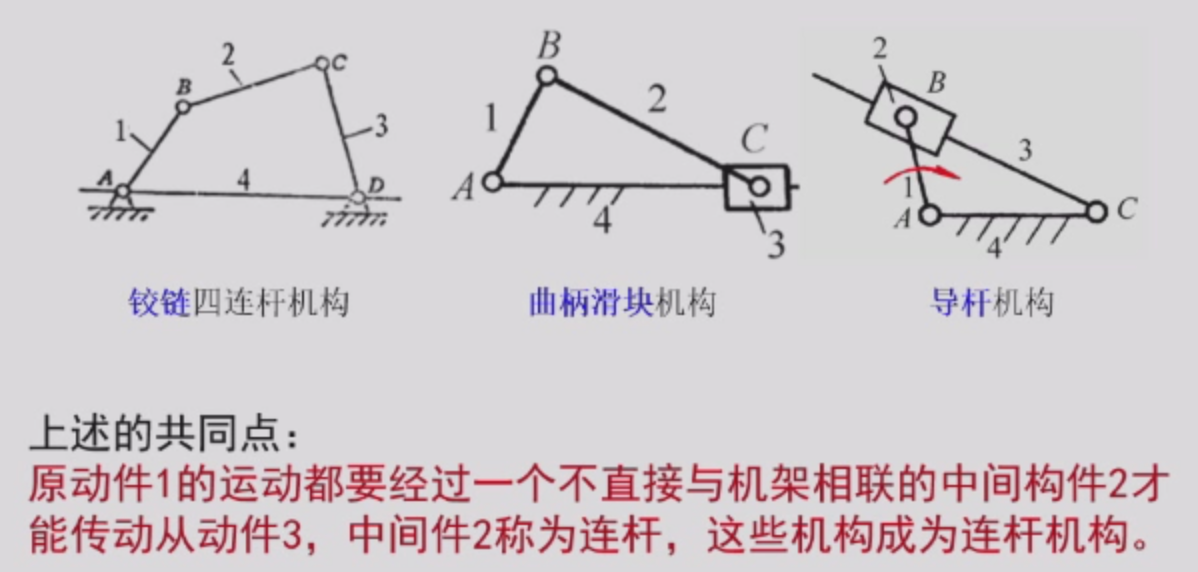
5. 连杆传动¶
- 平面连杆:公交车车门、火车车轮、缝纫机、起重机……
-
平面四连杆机构:1输入,通过连杆2,3输出;
-
优点:
-
缺点:
-
组成:
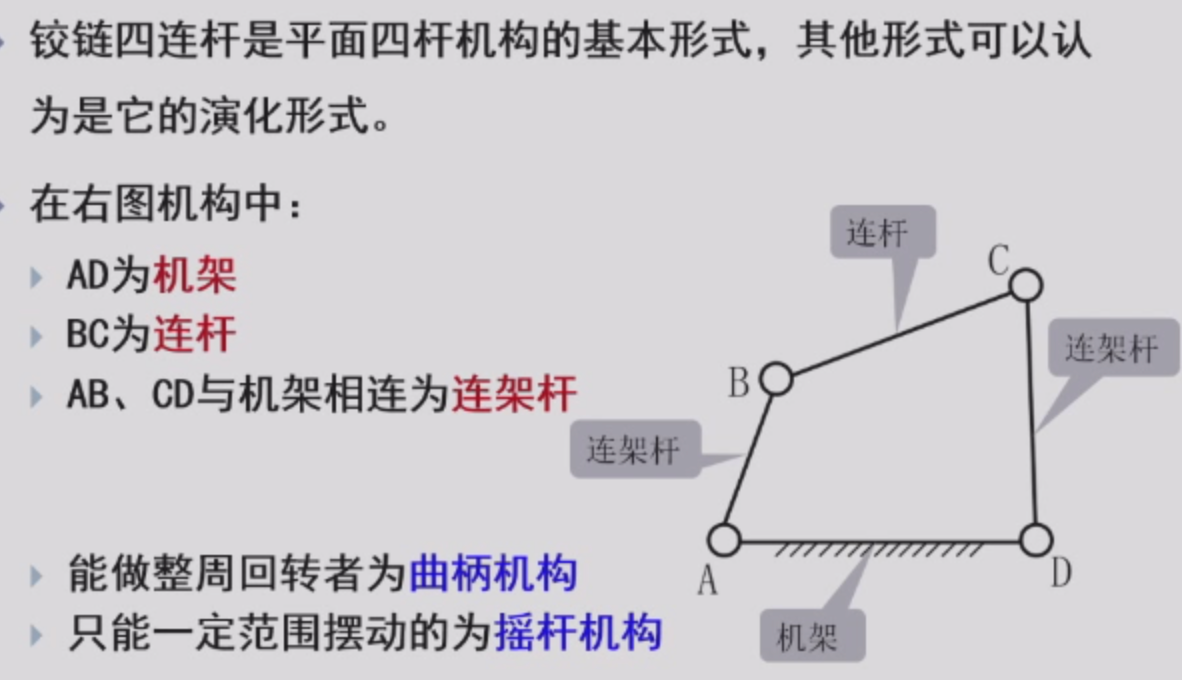
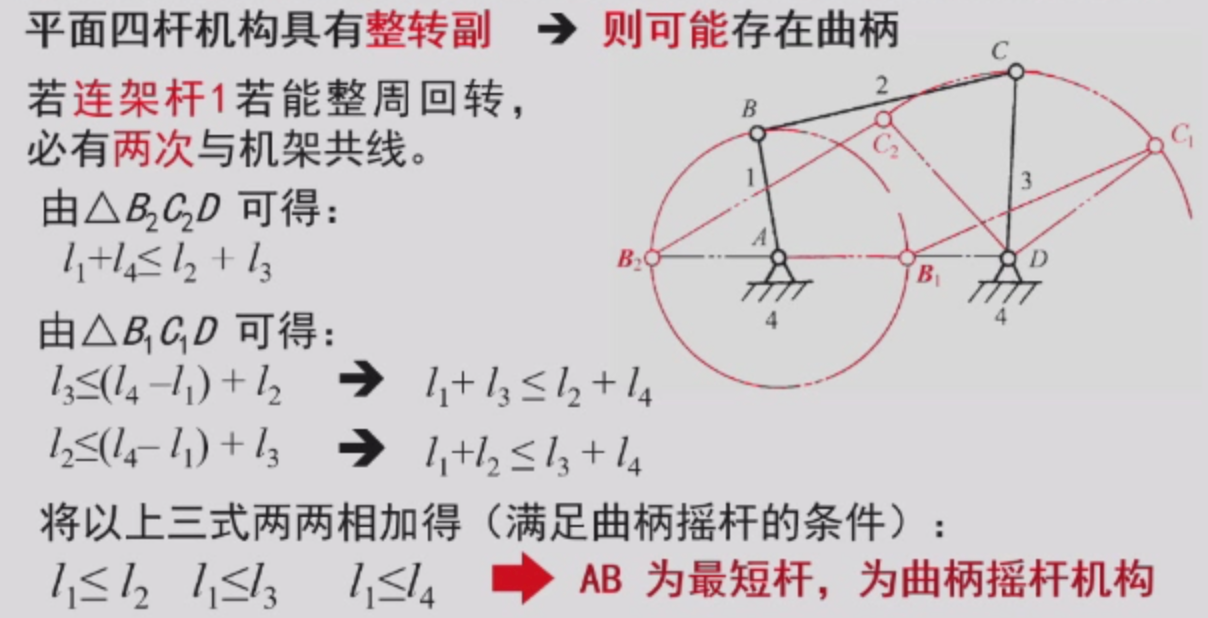
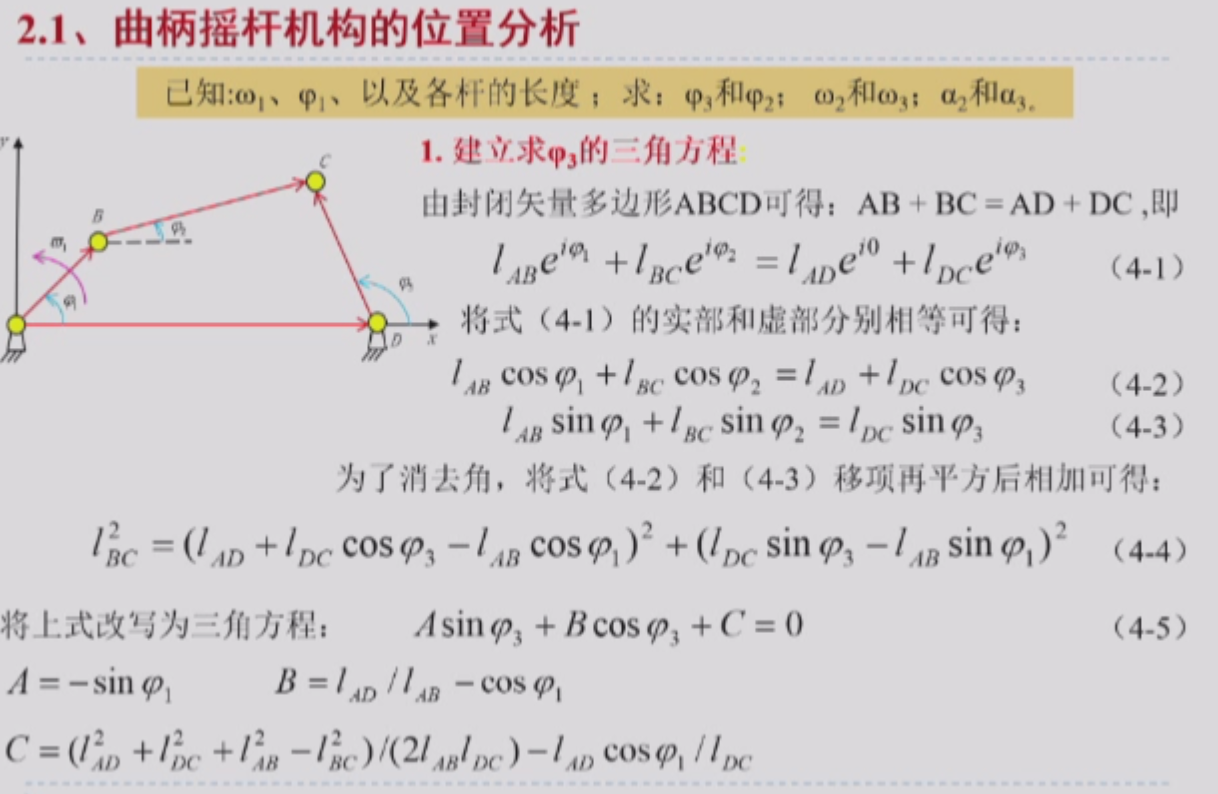
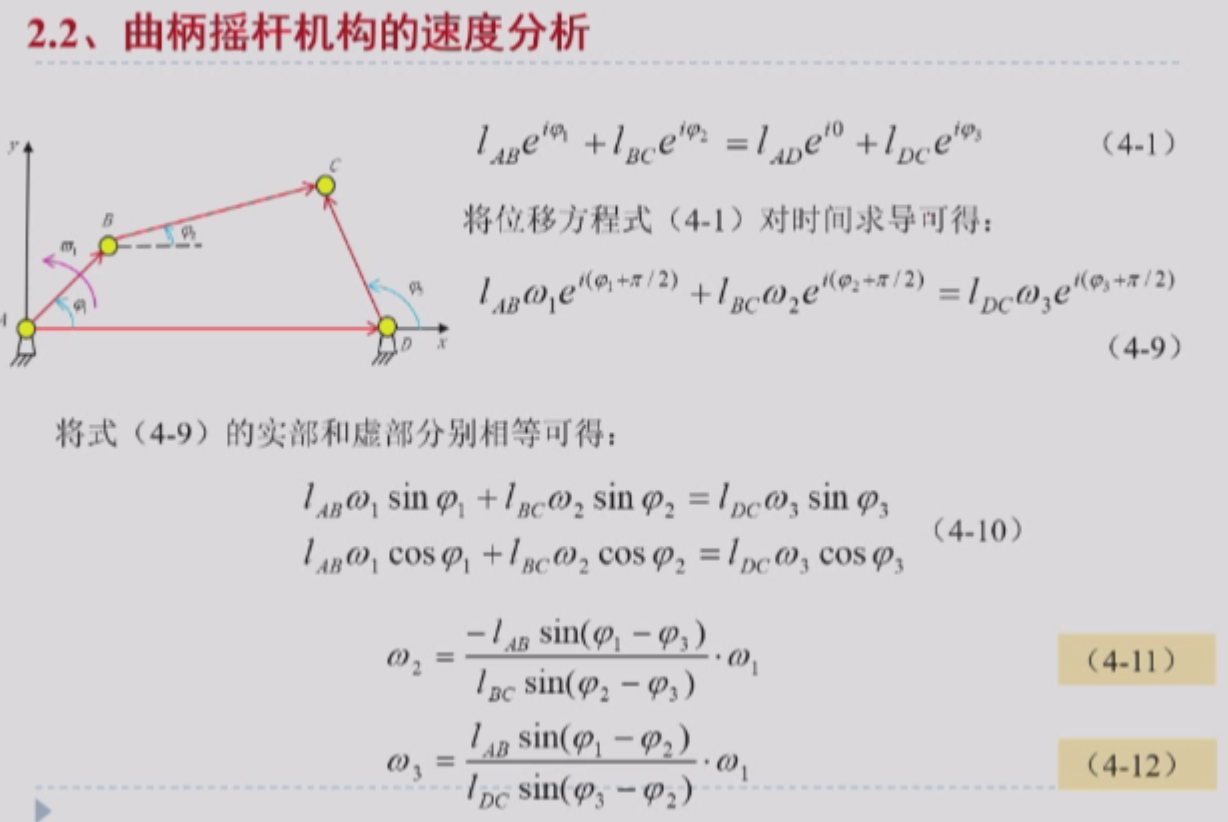
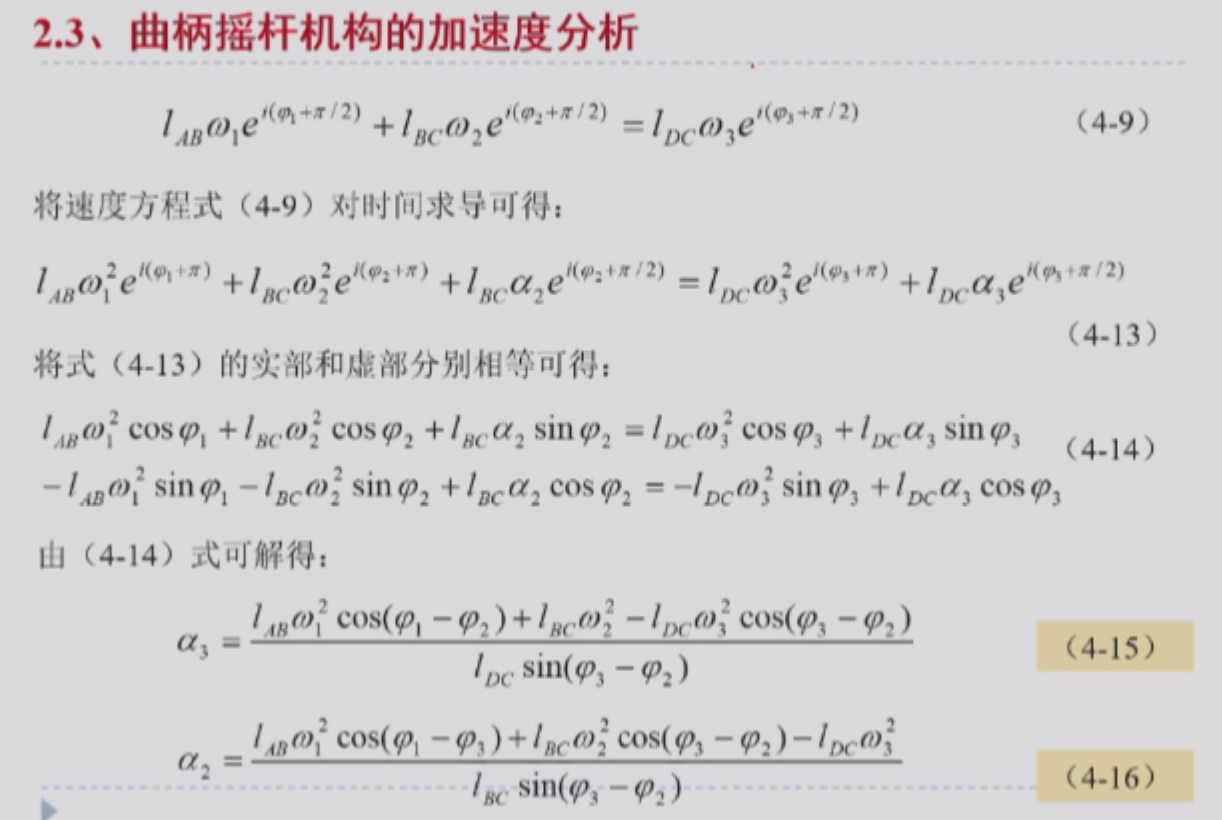
5.1 基本形式一:曲柄摇杆机构¶
- 铰链四杆机构的两个连架杆中,有一个为曲柄,另一个为摇杆;
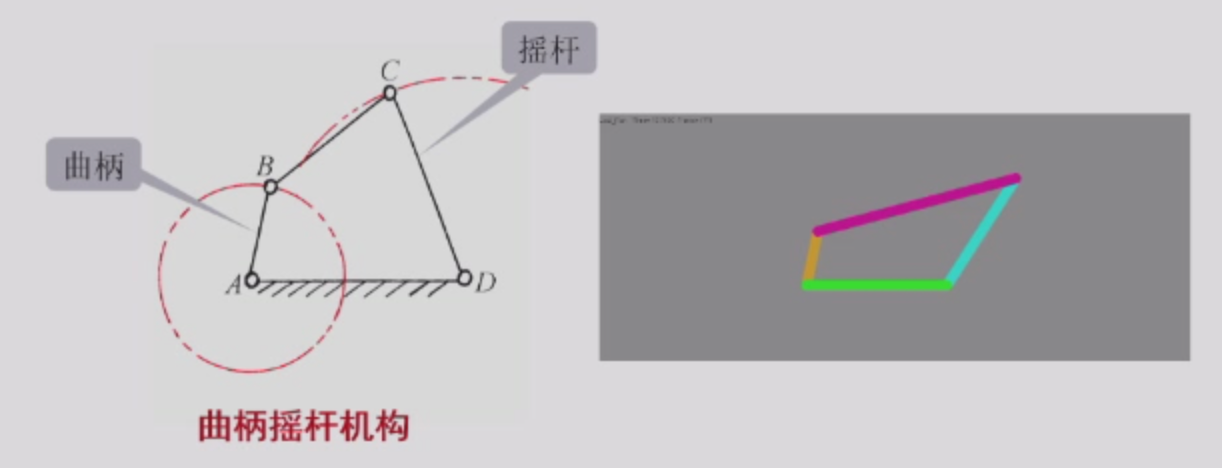
- 条件:输入杆必须是最短的;
5.2 基本形式二:双曲柄机构¶
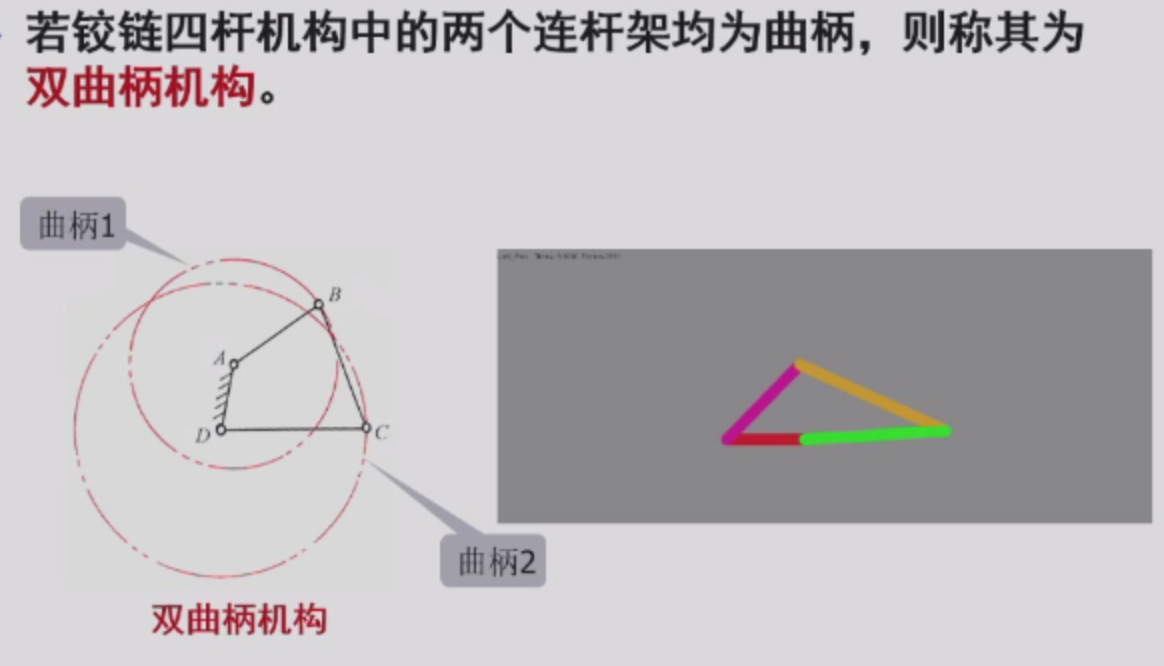
- 当最短杆为机架l4时,则为双曲柄机构;
5.3 基本形式三:双摇杆机构¶
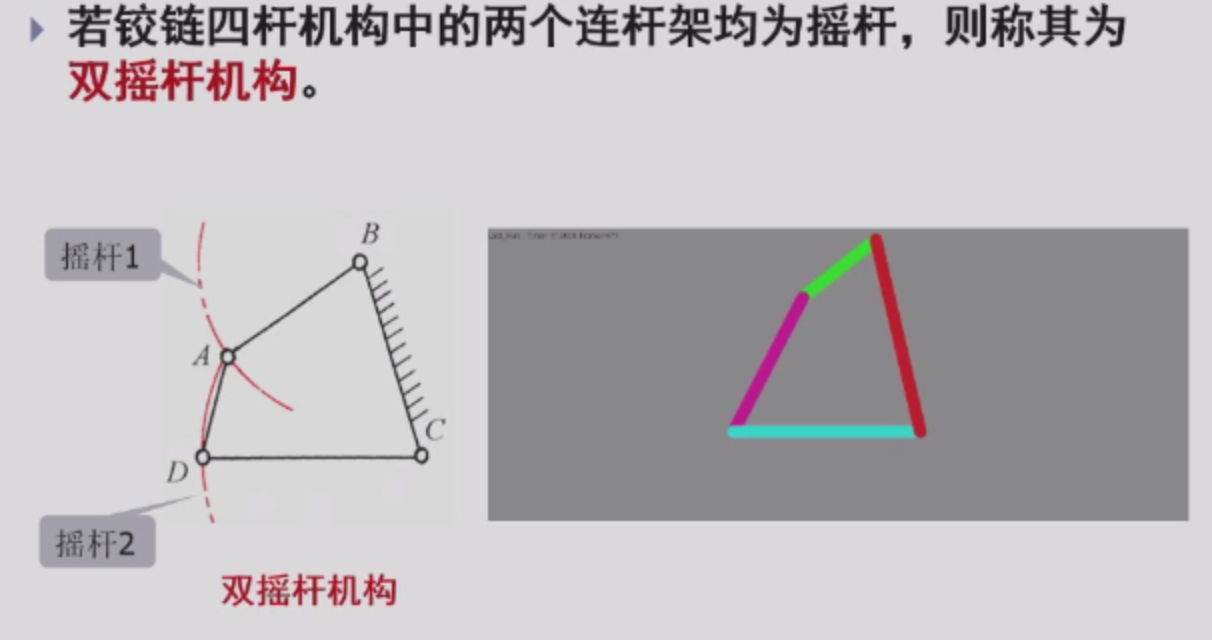
- 当最短杆为连杆l2时,则为双摇杆机构;
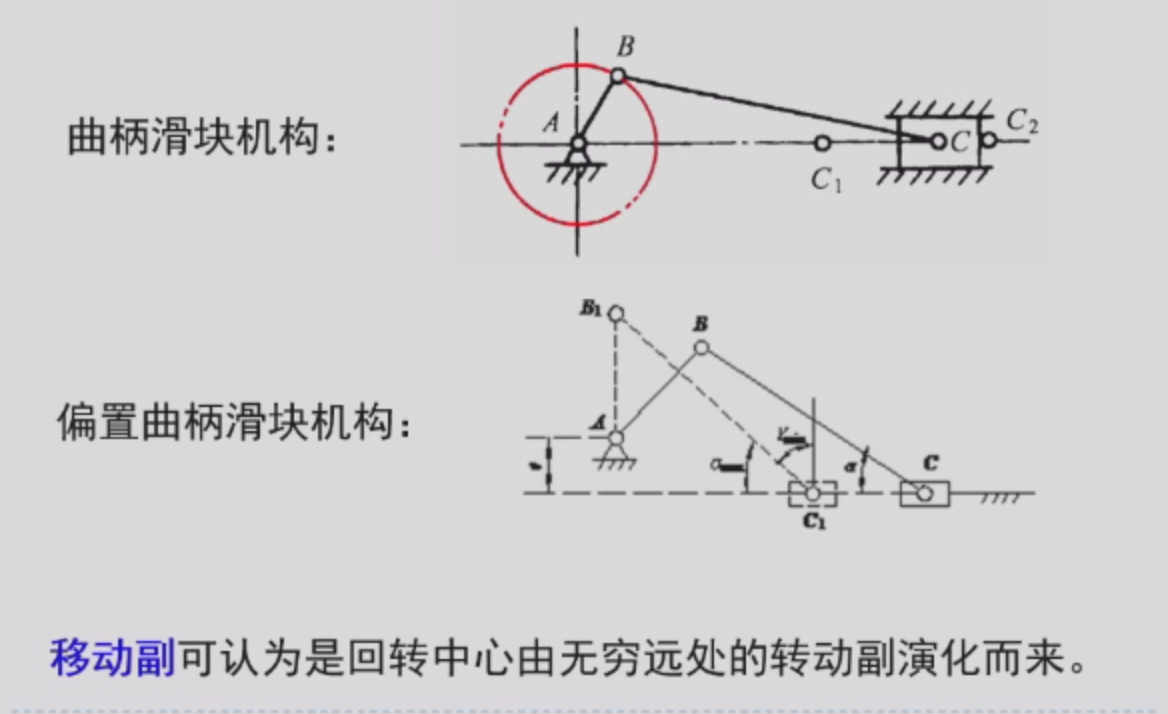
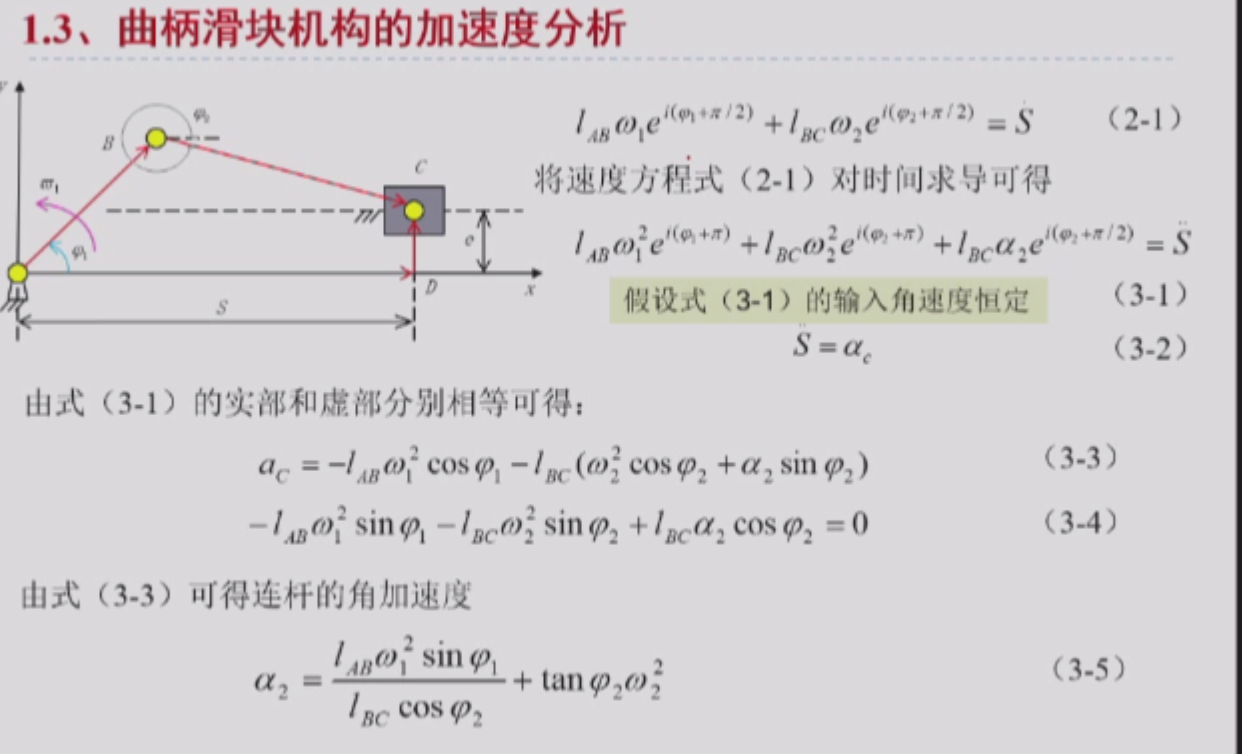
演化形式一:曲柄滑块机构¶
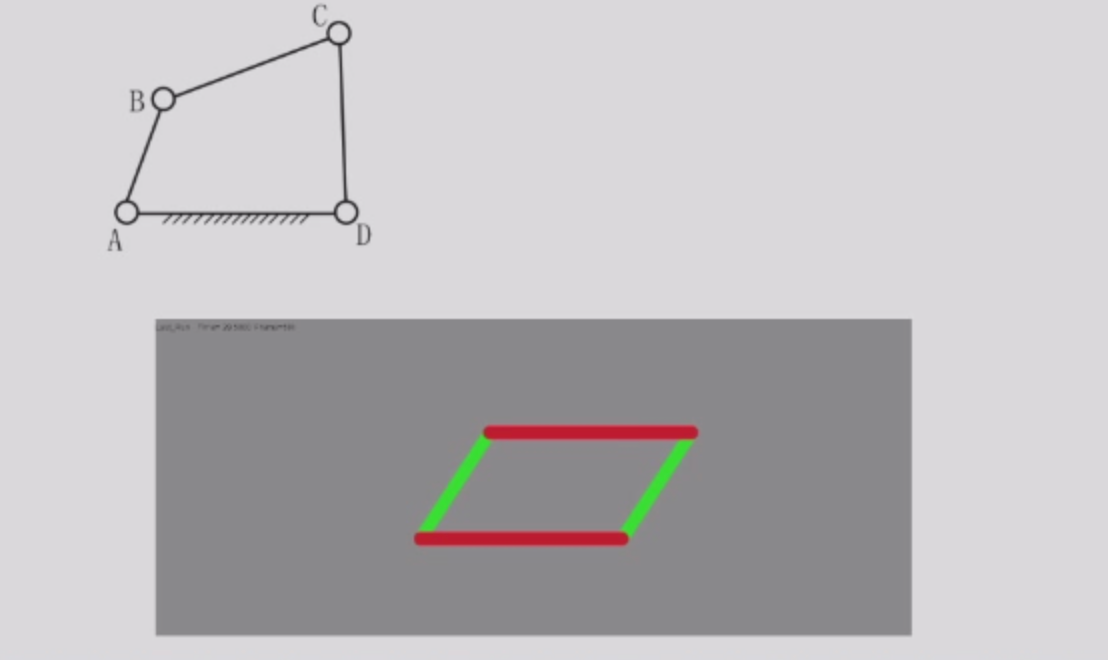
演化形式二:平行四边形机构¶
- 连杆始终与地面平行,但是不一定是真的平行于水平面(地面),固定在地面上也是可以的。
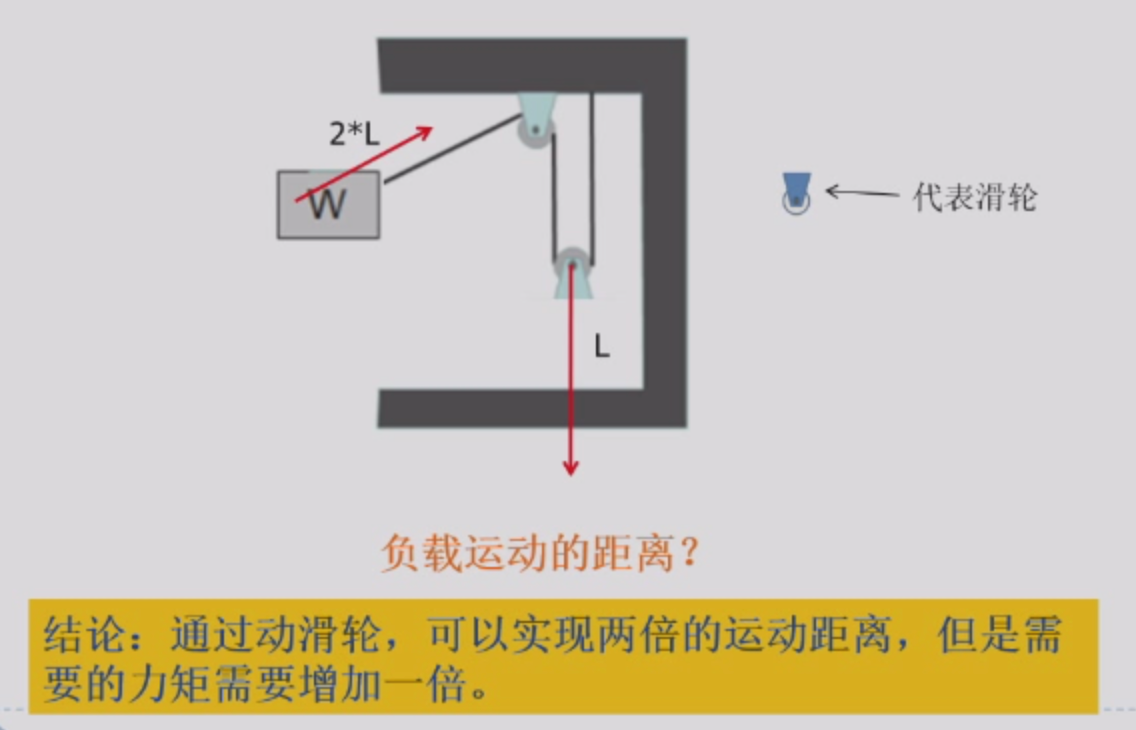
6. 滑轮组¶
- 固定轮只能用于改变力的方向,而运动轮可以降低输入力量的大小;
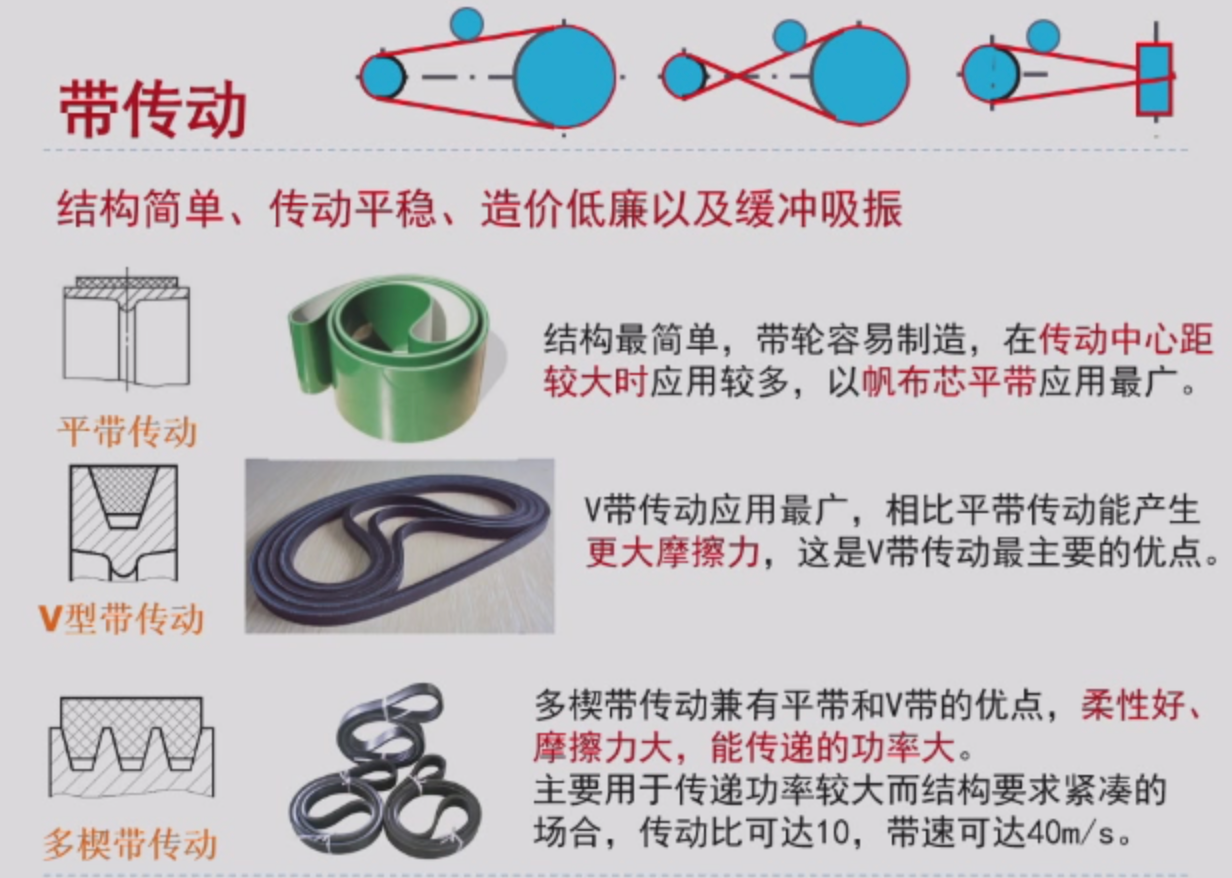
7. 带传动¶
-
容易打滑,传动精度不太好;
-
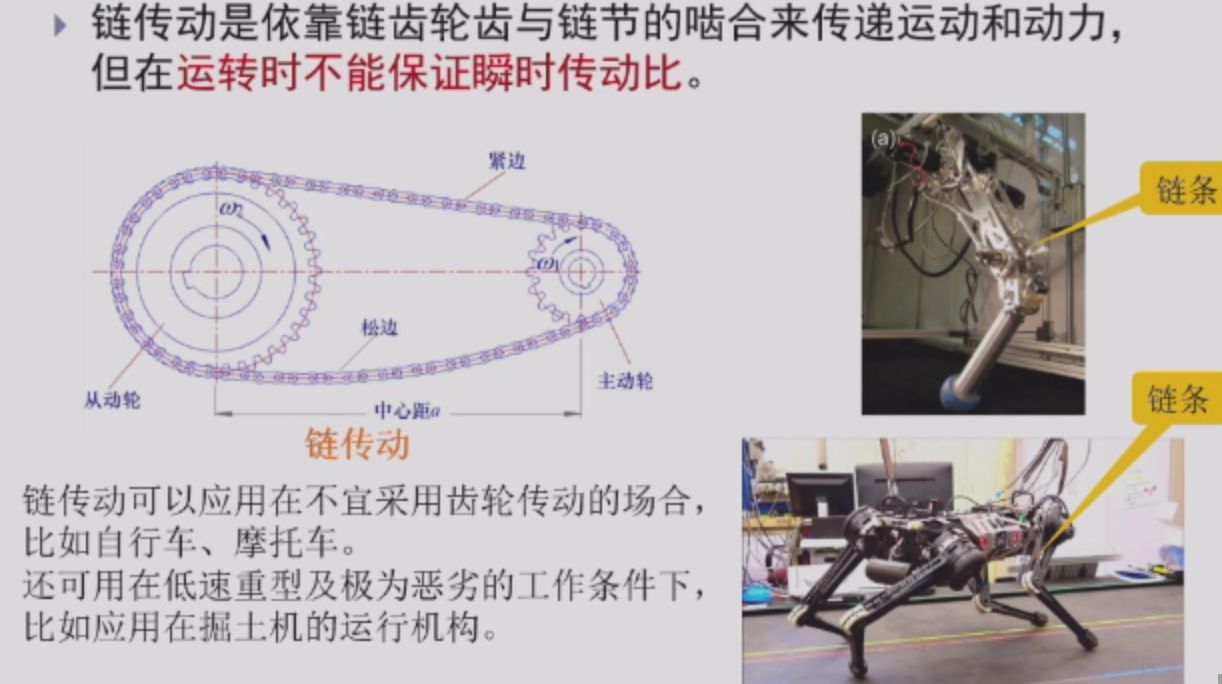
8. 链传动¶
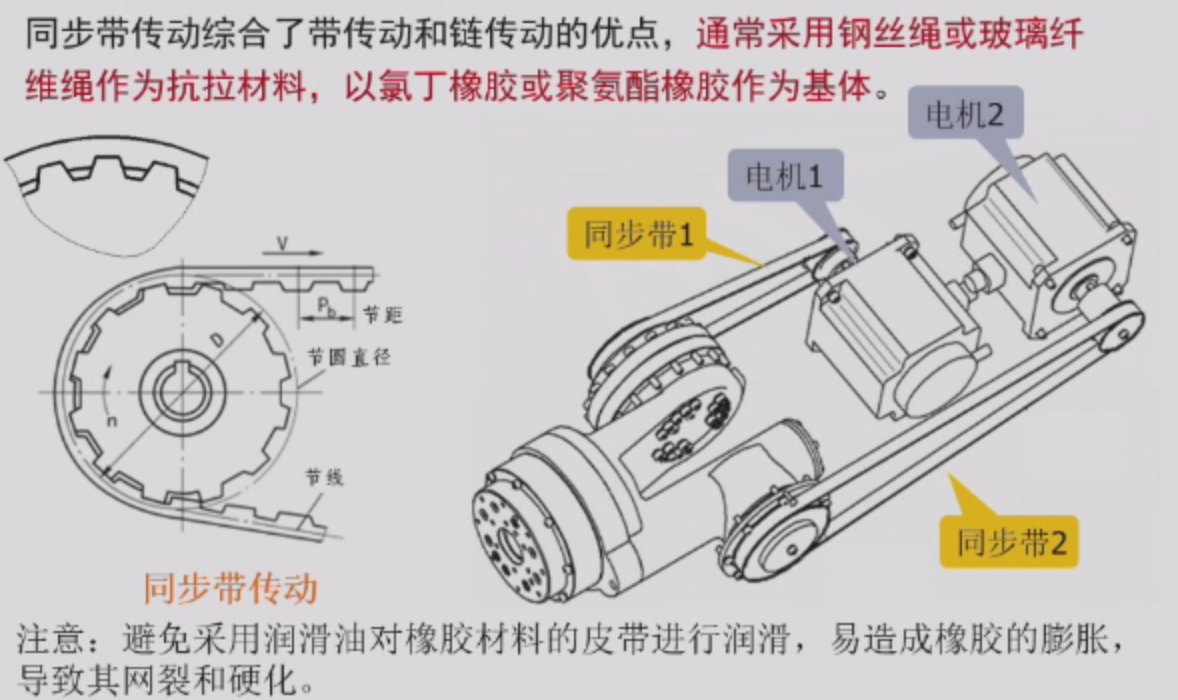
9. 同步带¶
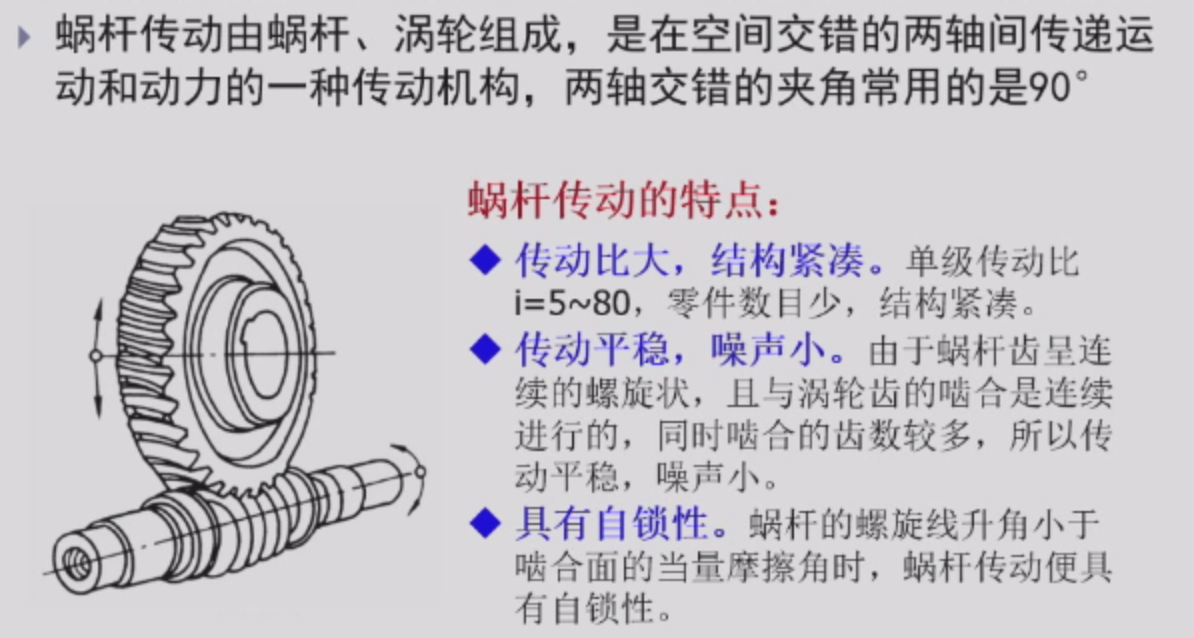
10. 蜗杆传动¶
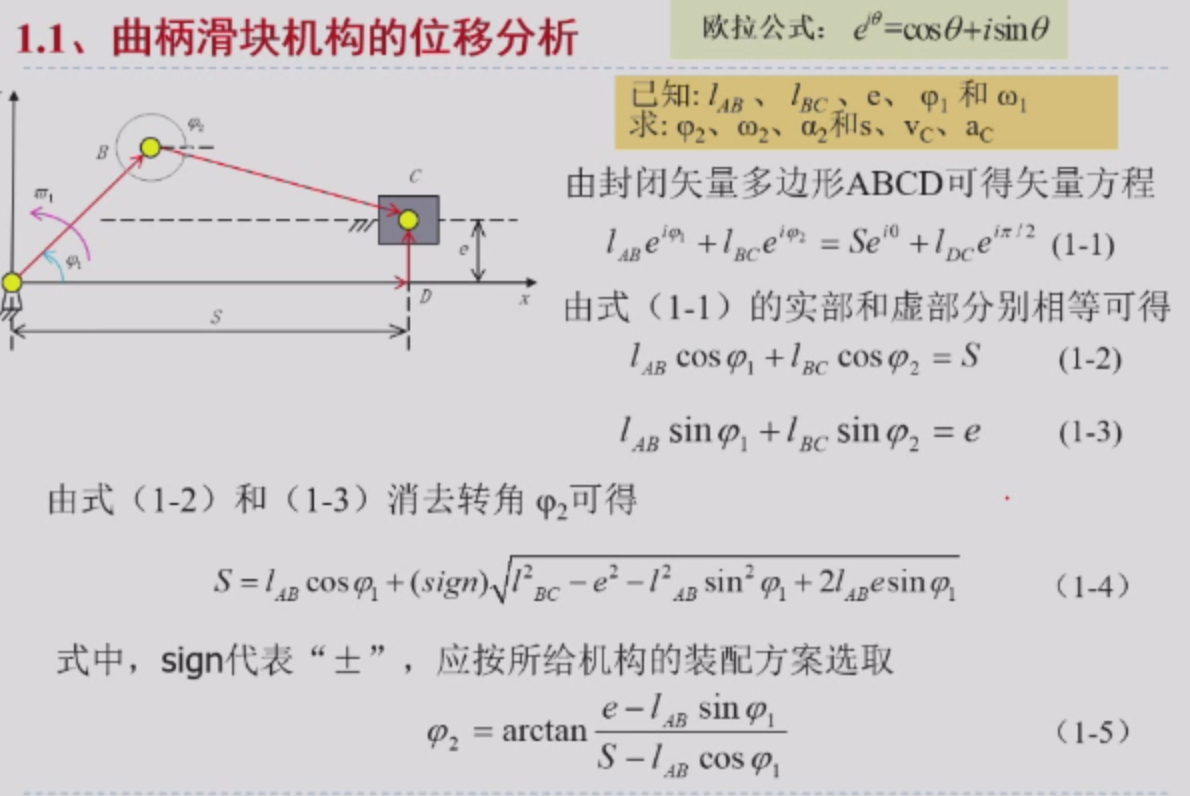
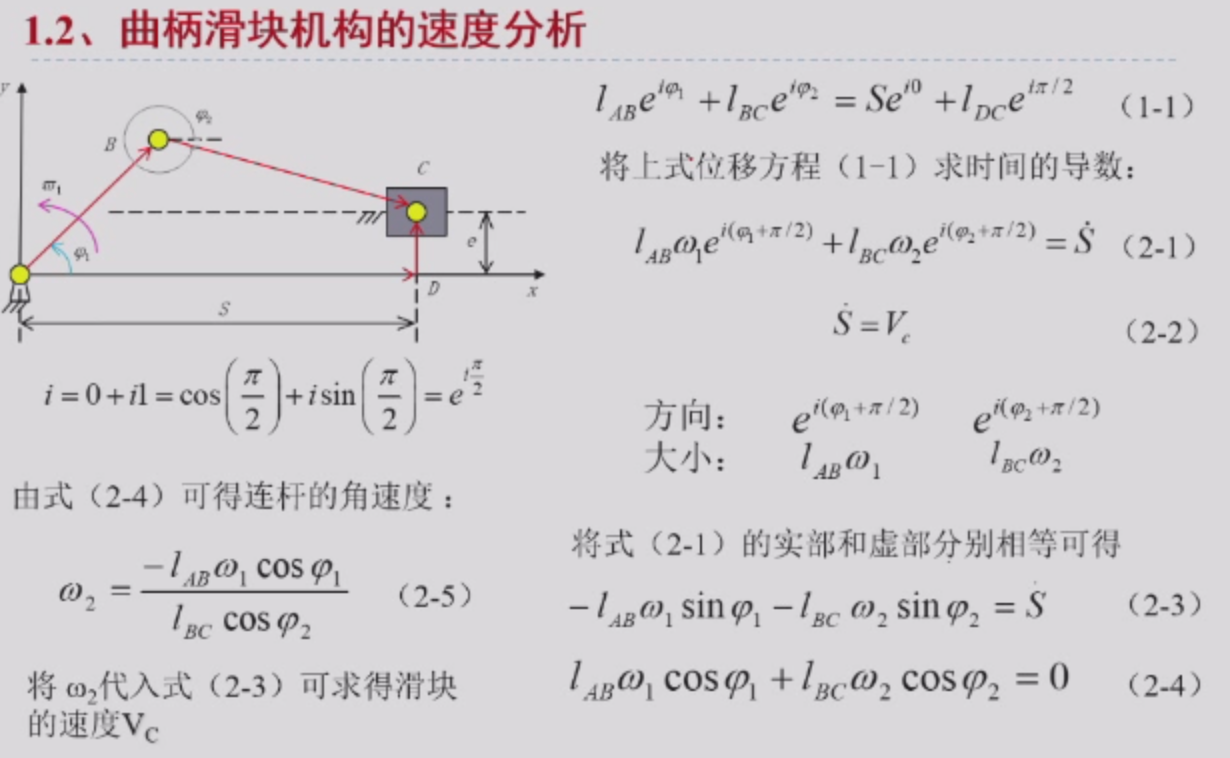
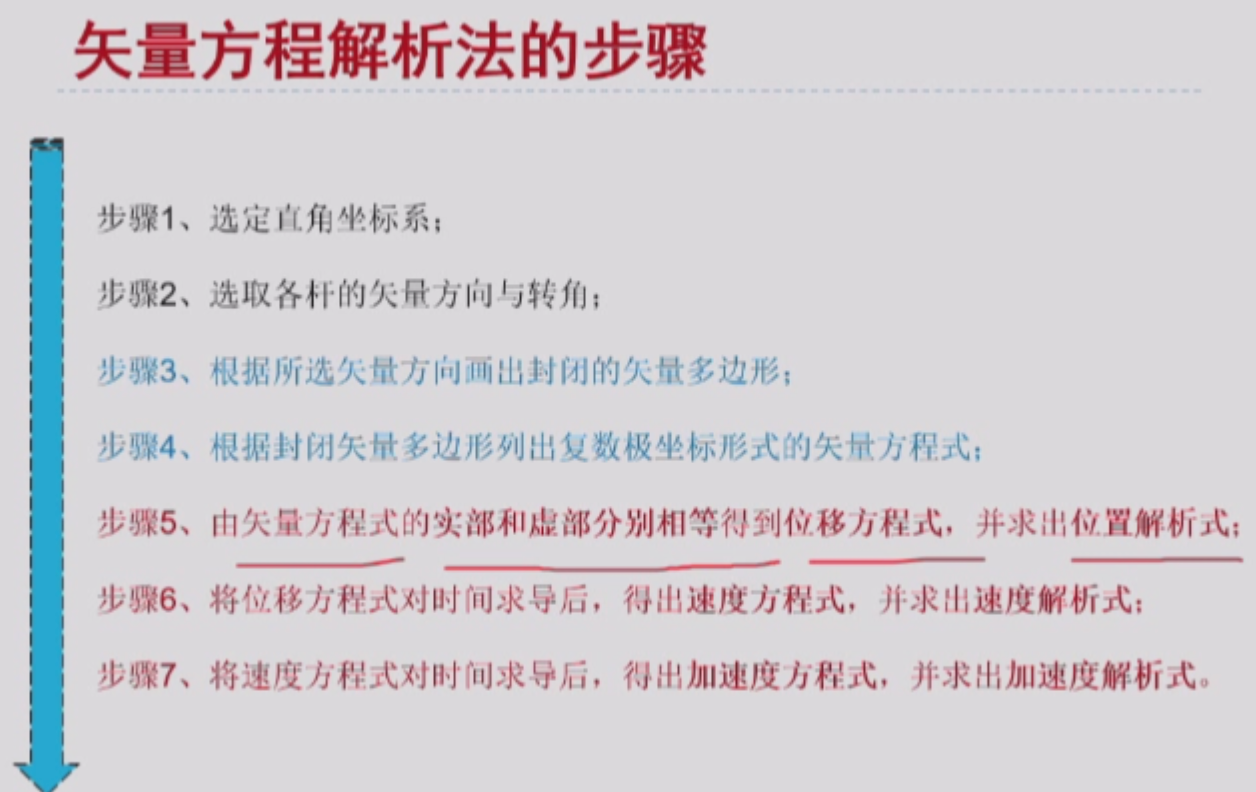
9. 平面四连杆运动学——解析法¶
本文总阅读量次