第六课 机器人驱动原理概述-2
约 350 个字 22 张图片 预计阅读时间 1 分钟
- 你认为一个机器人应该具备哪些主要特征?
- 答:运动、感知、决策、交互。
电机驱动¶
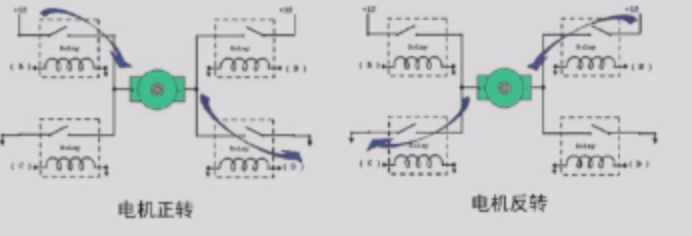
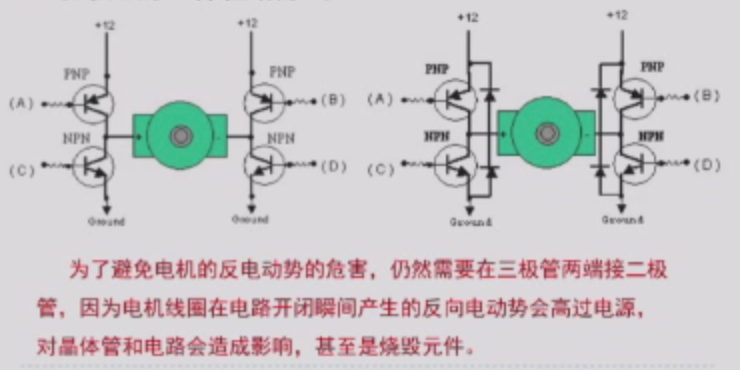
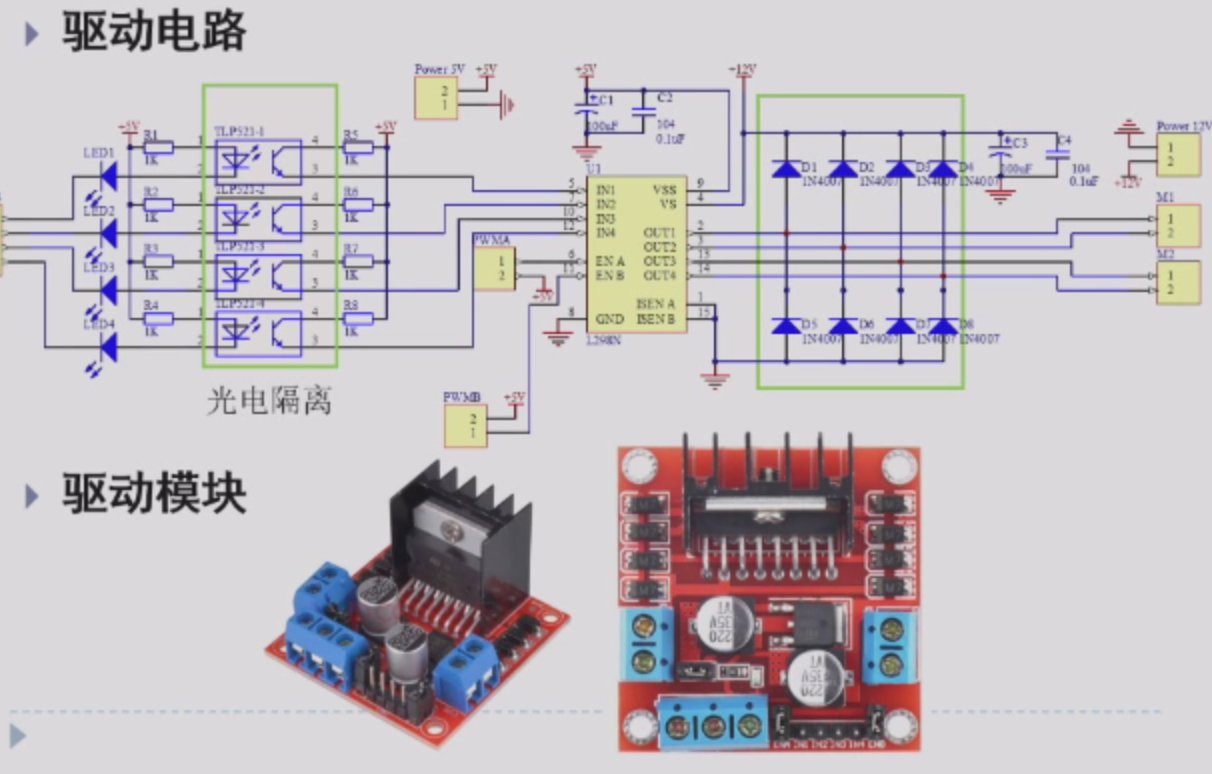
1.1 有刷电机(H桥驱动)¶
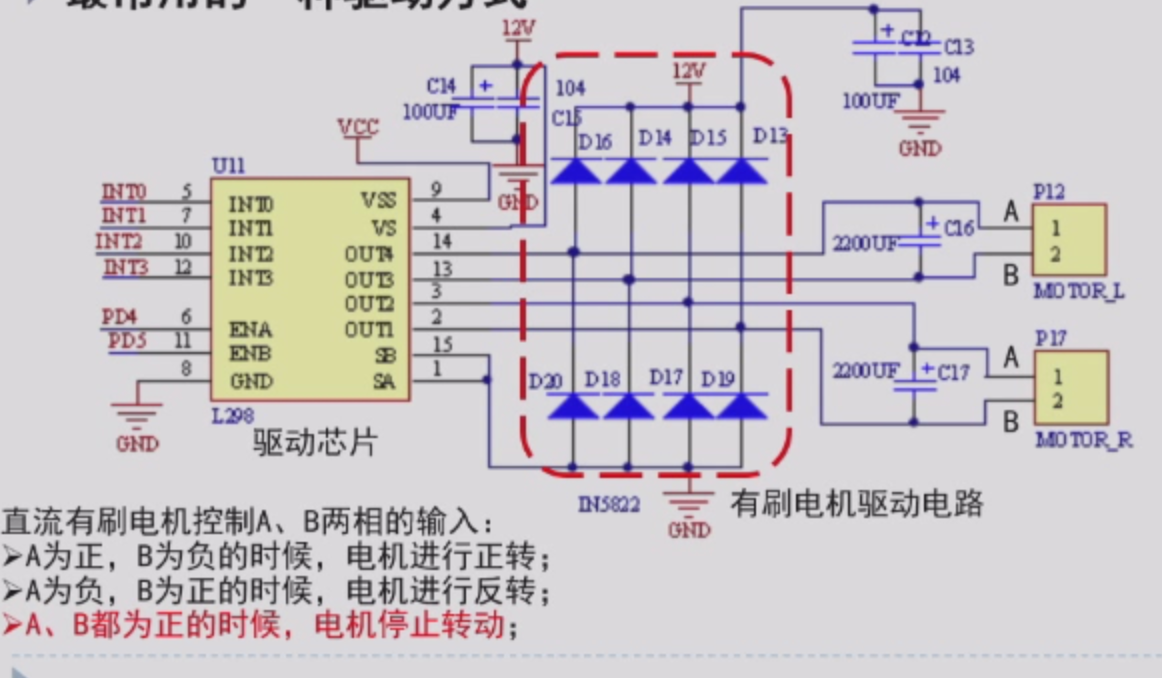
- 最常用的一种驱动方式
-
-
-
-
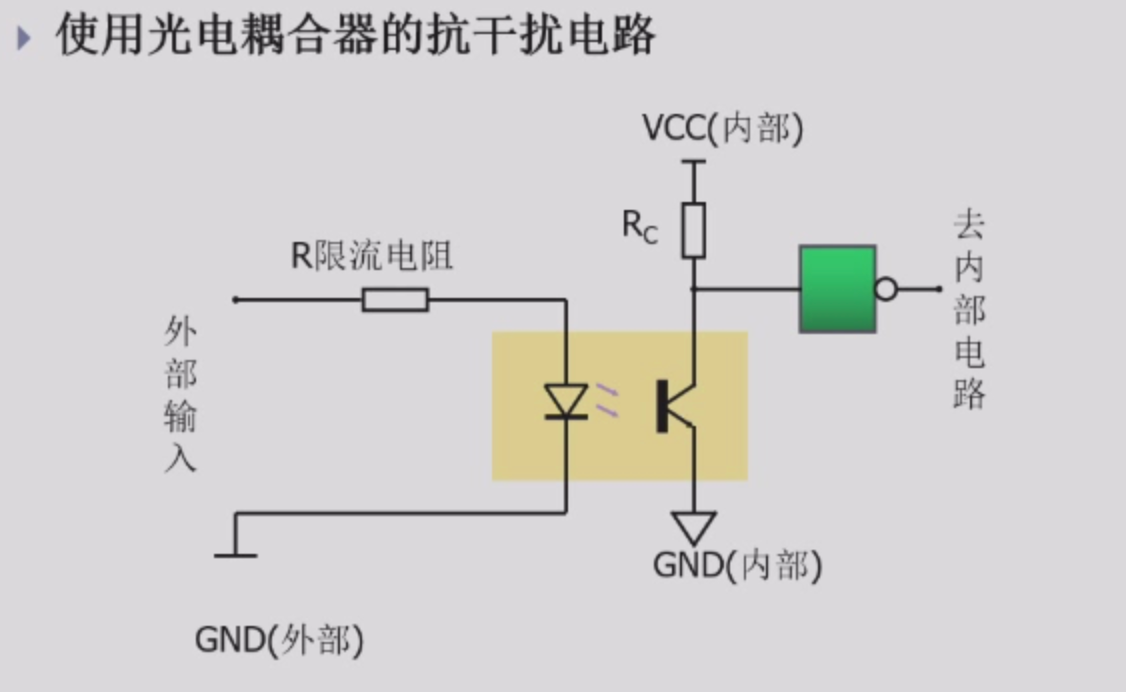
光电隔离电路(过滤环境因素,因为本身的电压比较小,可能只有3.3V,很容易受到环境影响)
- 驱动电路与模块
1.2 基本控制方式¶
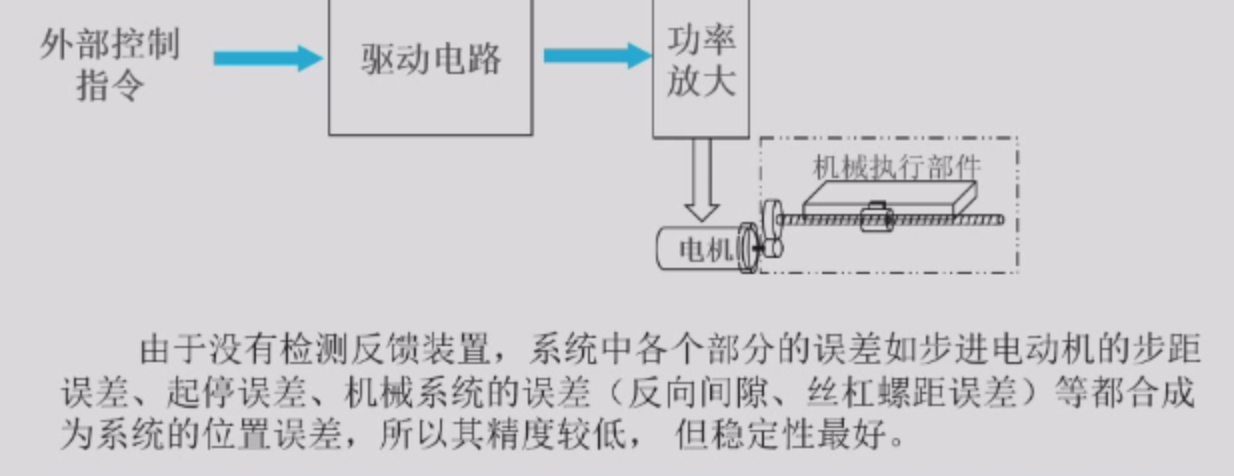
开环伺服系统¶
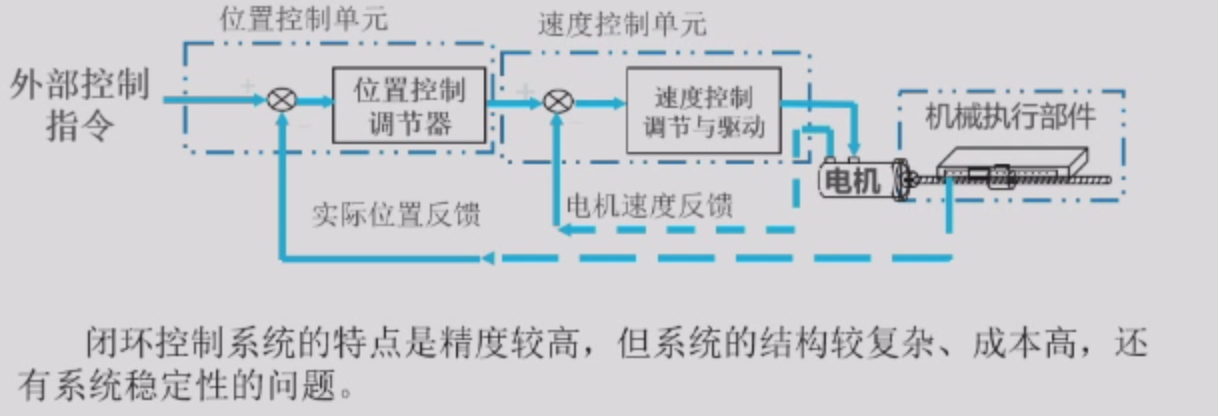
闭环伺服系统¶
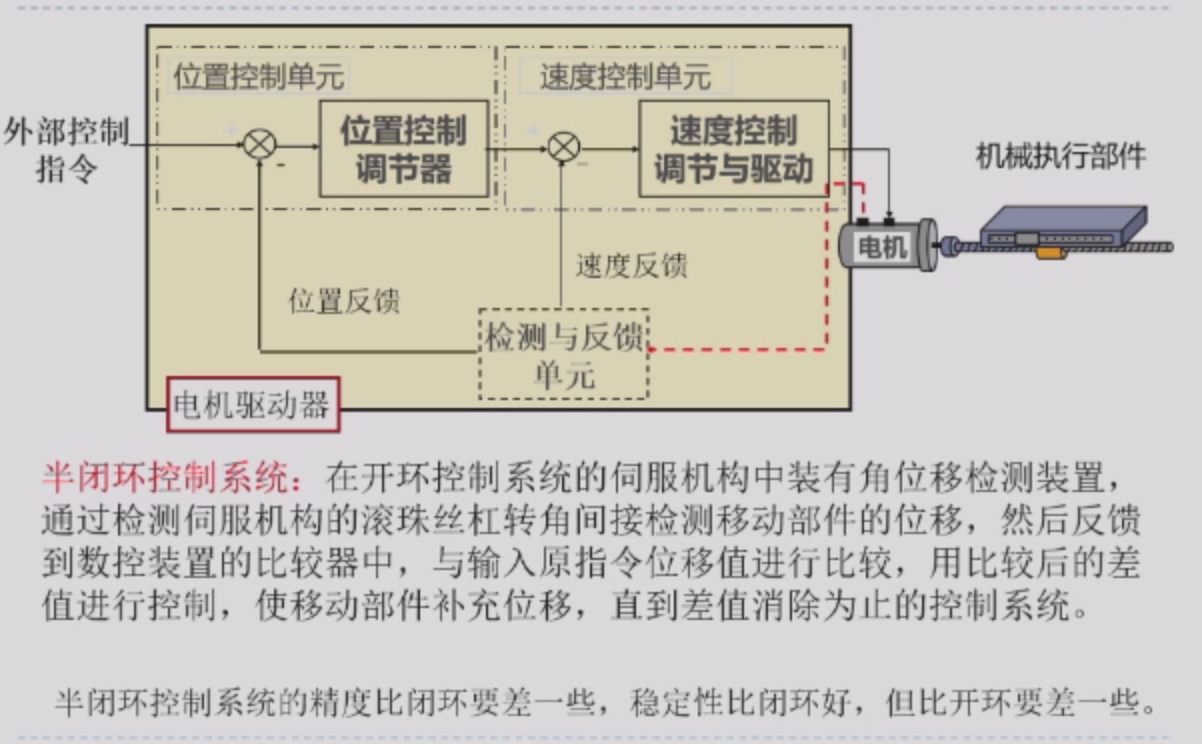
半闭环伺服系统¶
对于机械执行部件不进行检测,所以还是要优化机械结构;
气动驱动¶
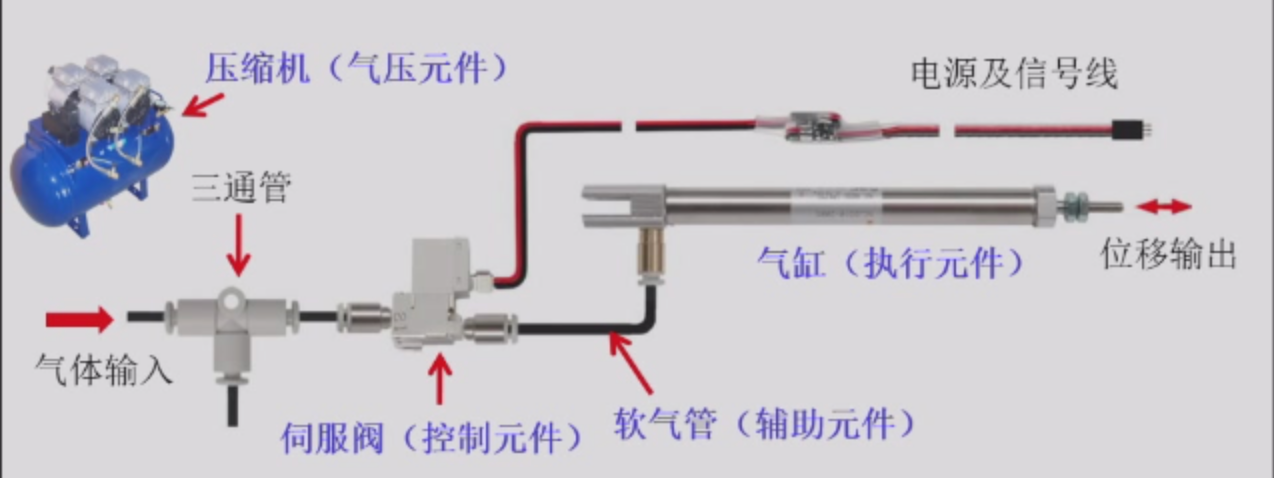
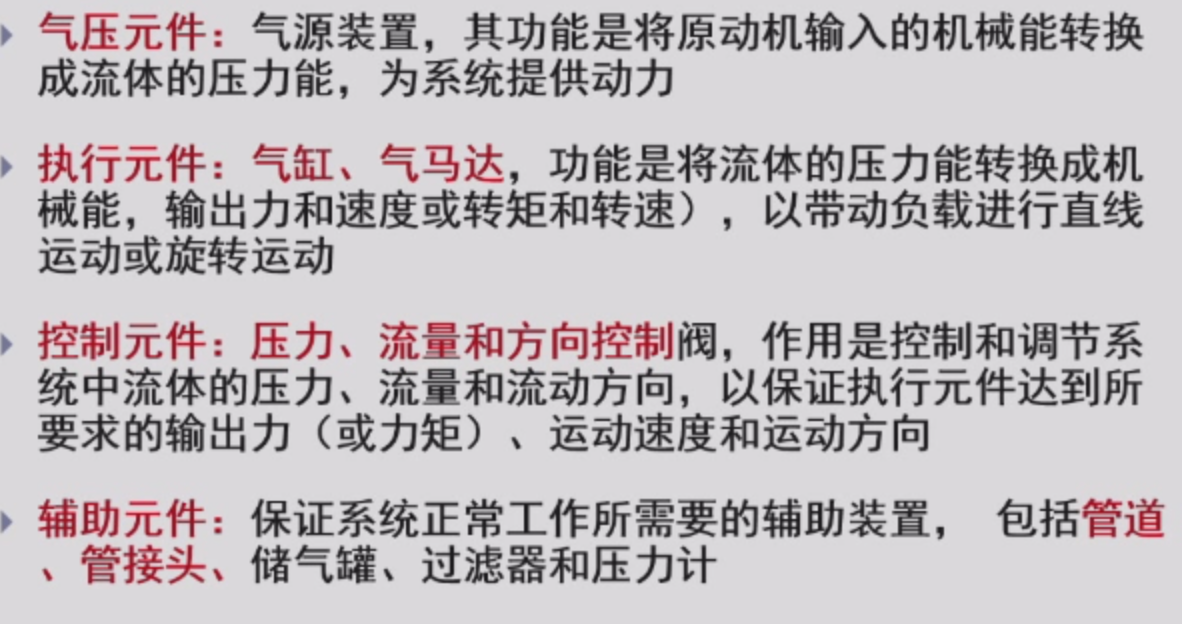
组成¶
-
包括气压发生装置、辅助元件、控制元件和执行元件;
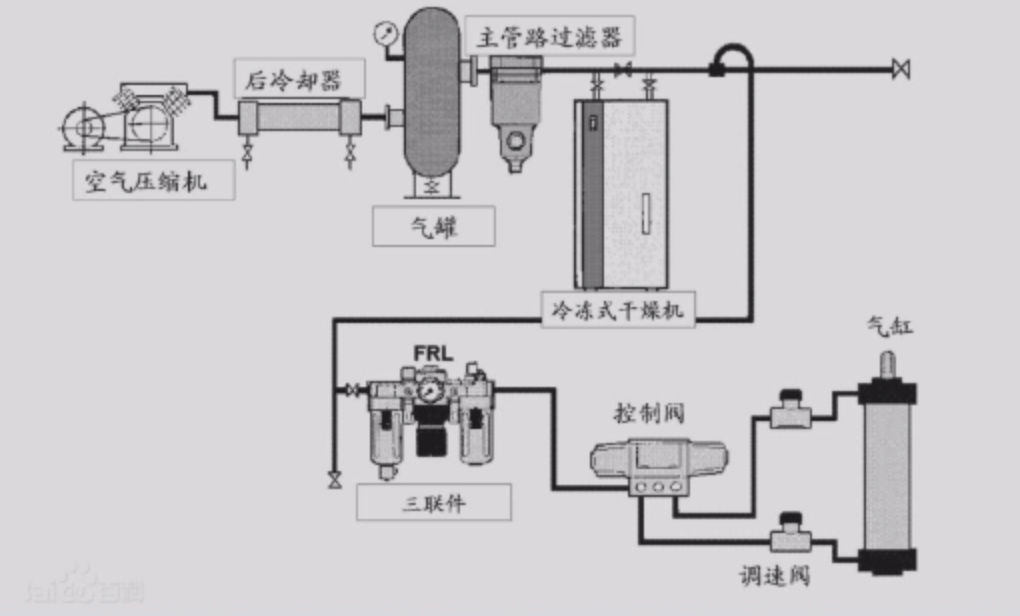
-
简易版:气压元件、控制元件、执行元件和辅助元件组成;
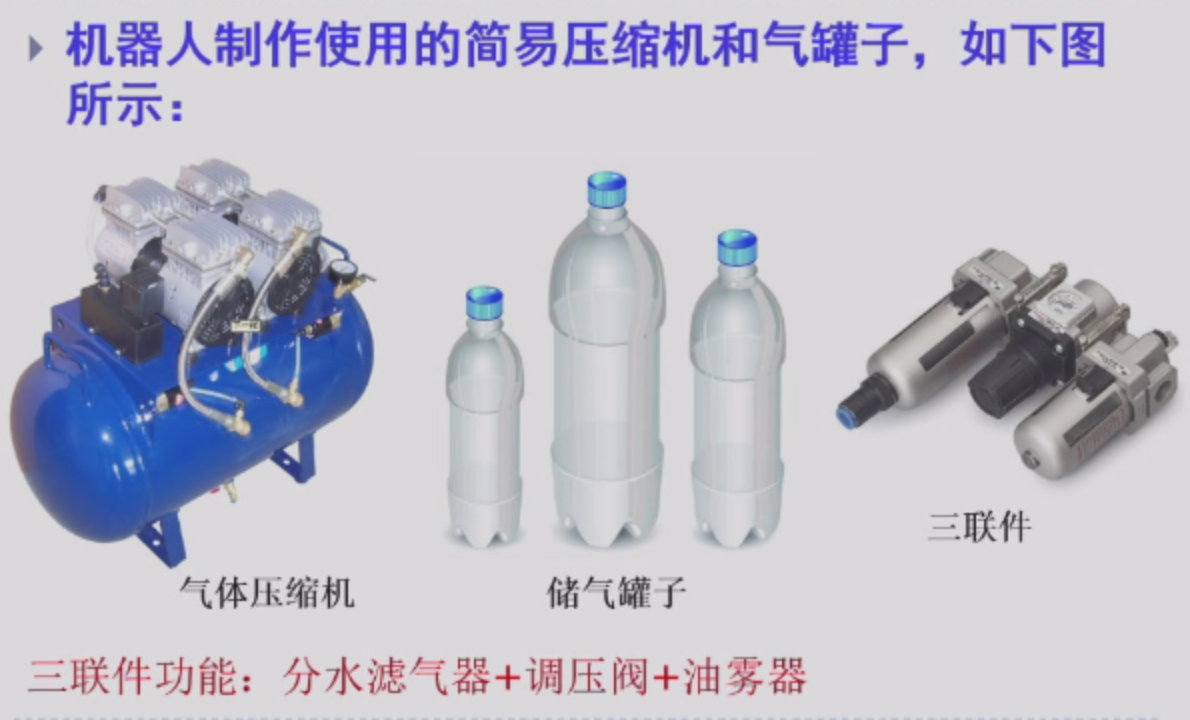
气动器件¶
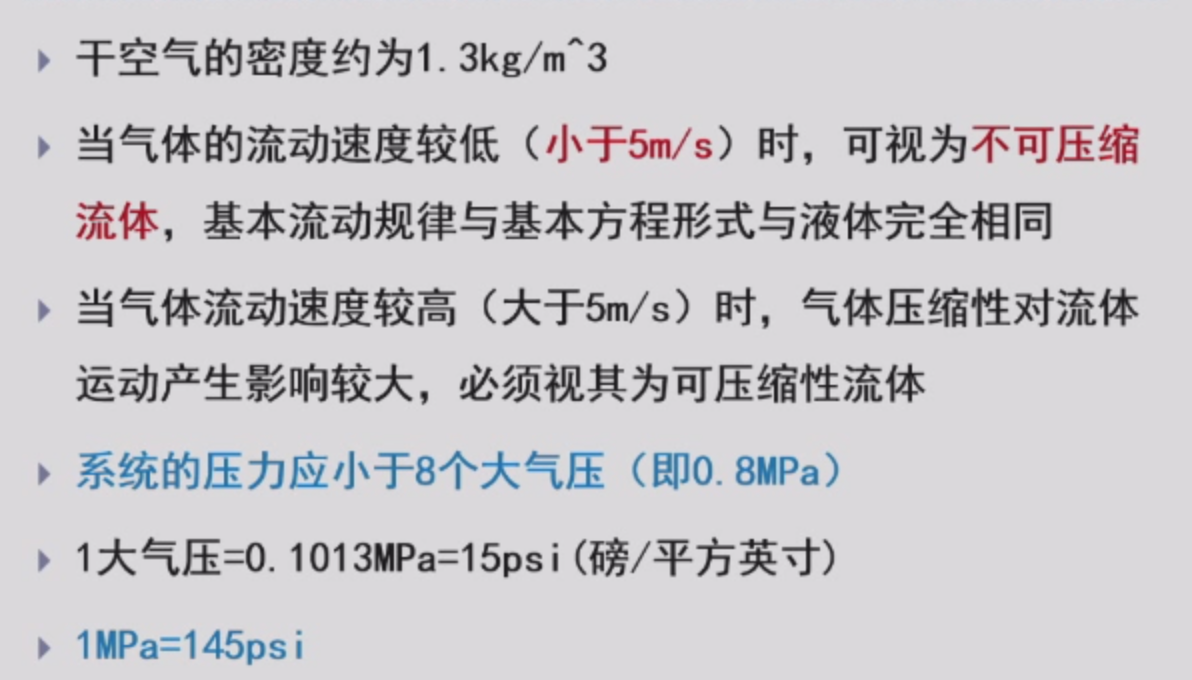
气体特性¶
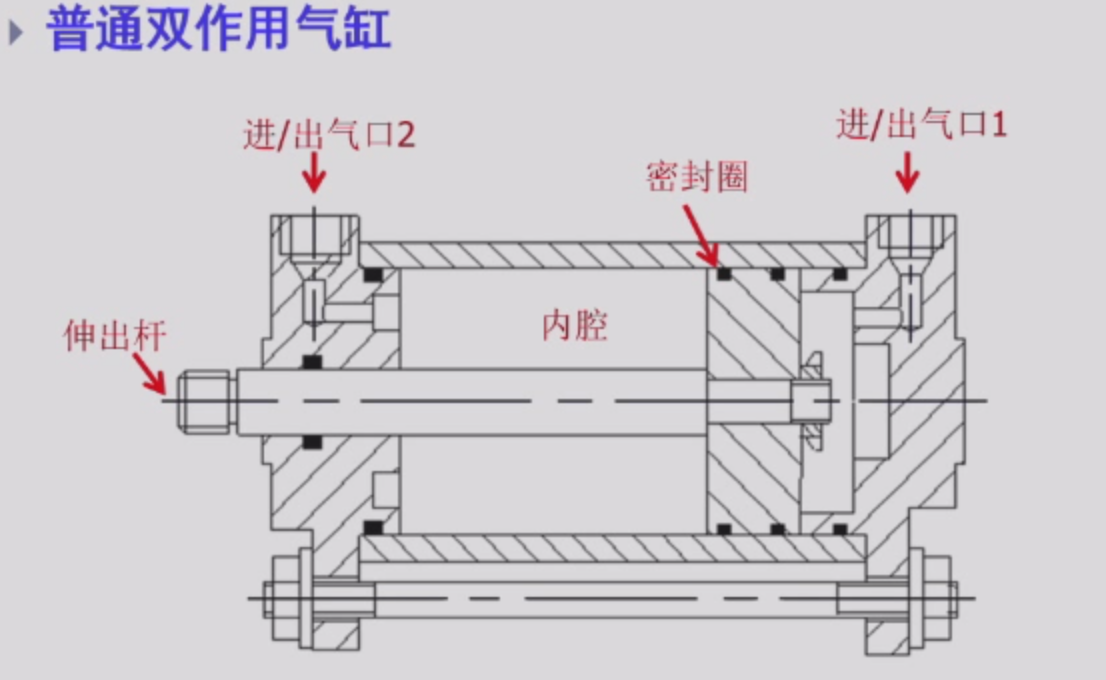
简易气缸¶
气动基本回路¶
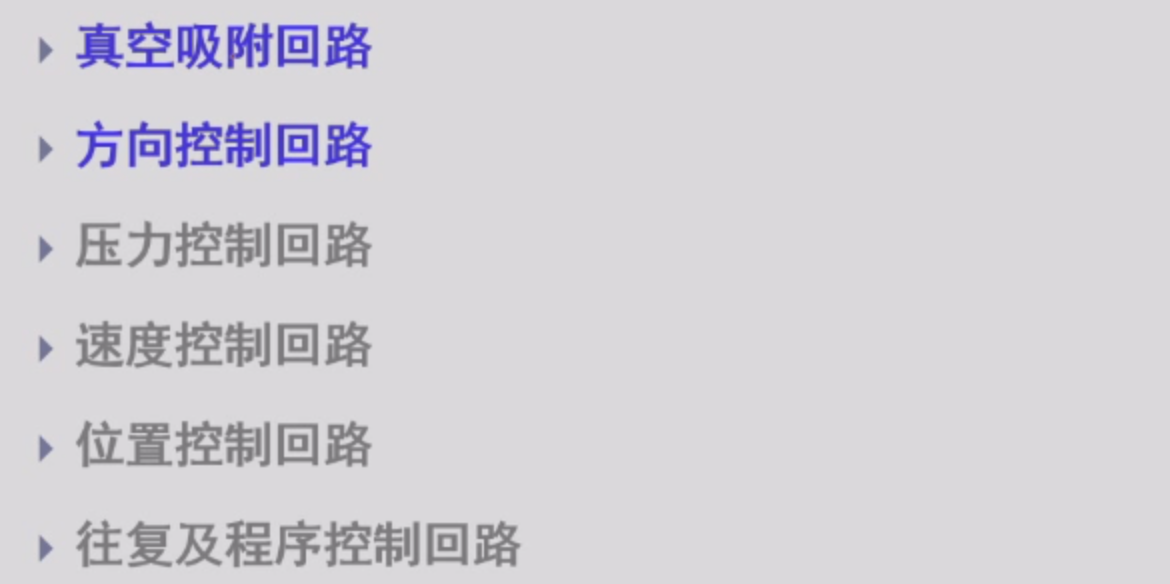
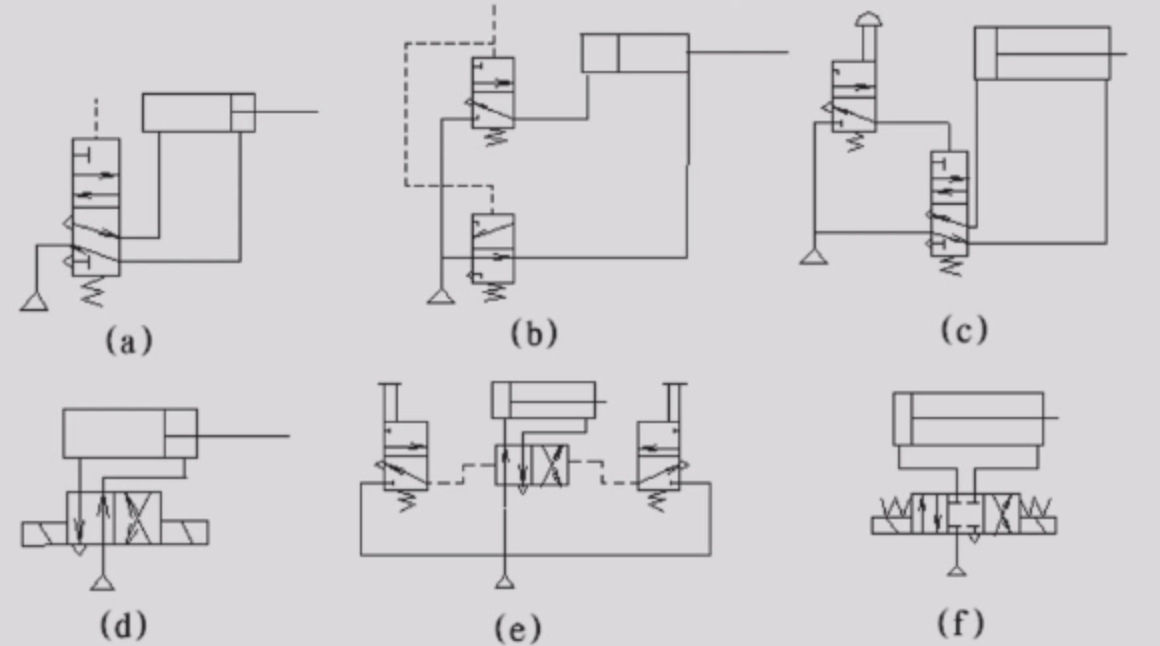
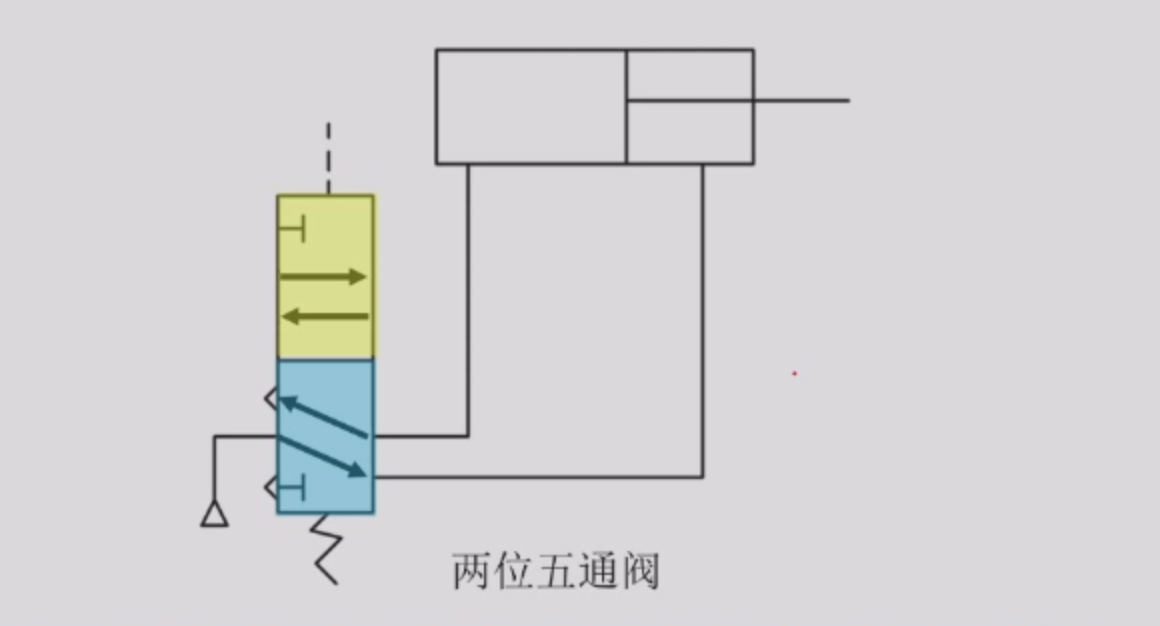
方向控制回路(重要)¶
单作用气缸换向回路¶
- 掌握几位几通的概念
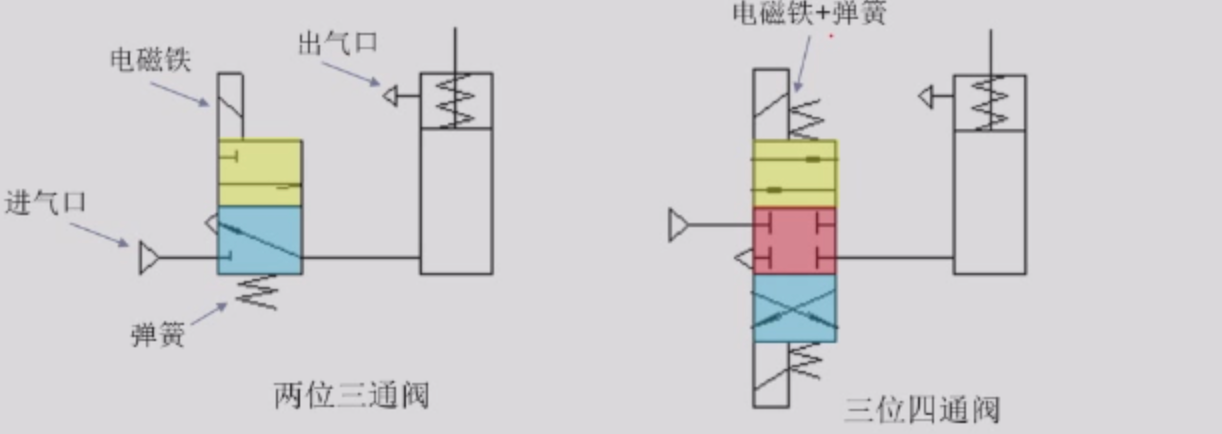
- 对于两位三通,电磁铁工作,黄色区域接入工作,气缸向上;蓝色时候,气缸向下;
- 对于三位四通,下面电磁铁工作,蓝色区域接入,气缸向上;上面电磁铁工作,黄色区域工作,气缸向下;电磁铁不工作,红色工作,气缸不动;
双作用气缸换向回路¶
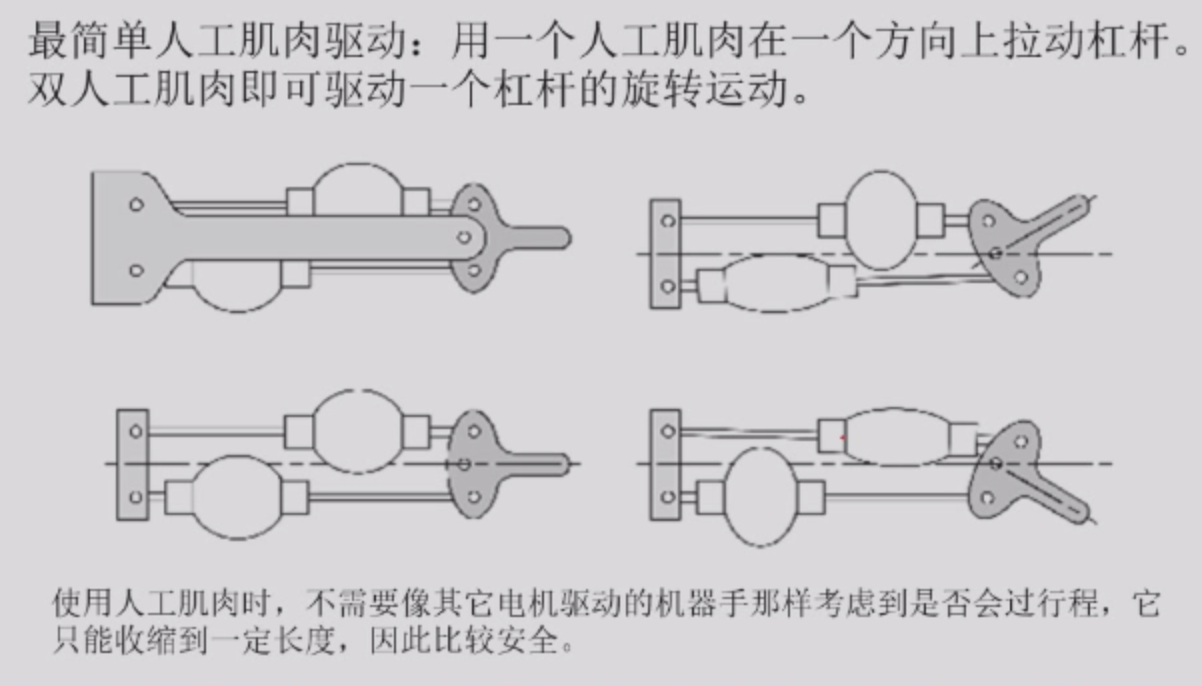
气动肌肉¶
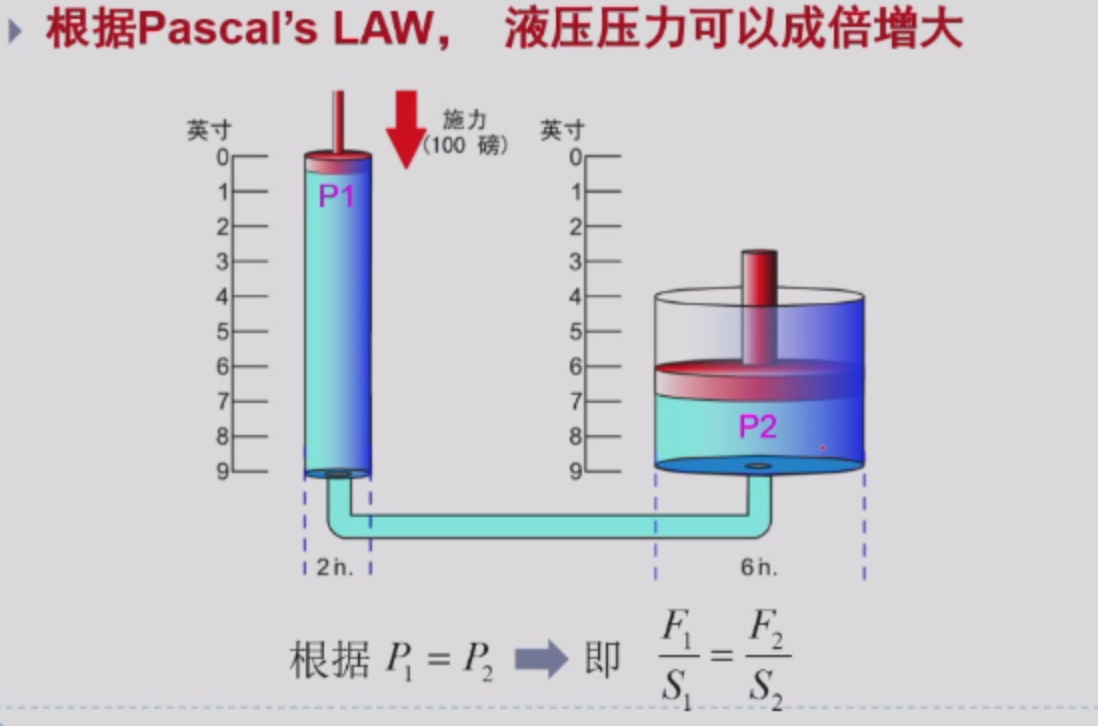
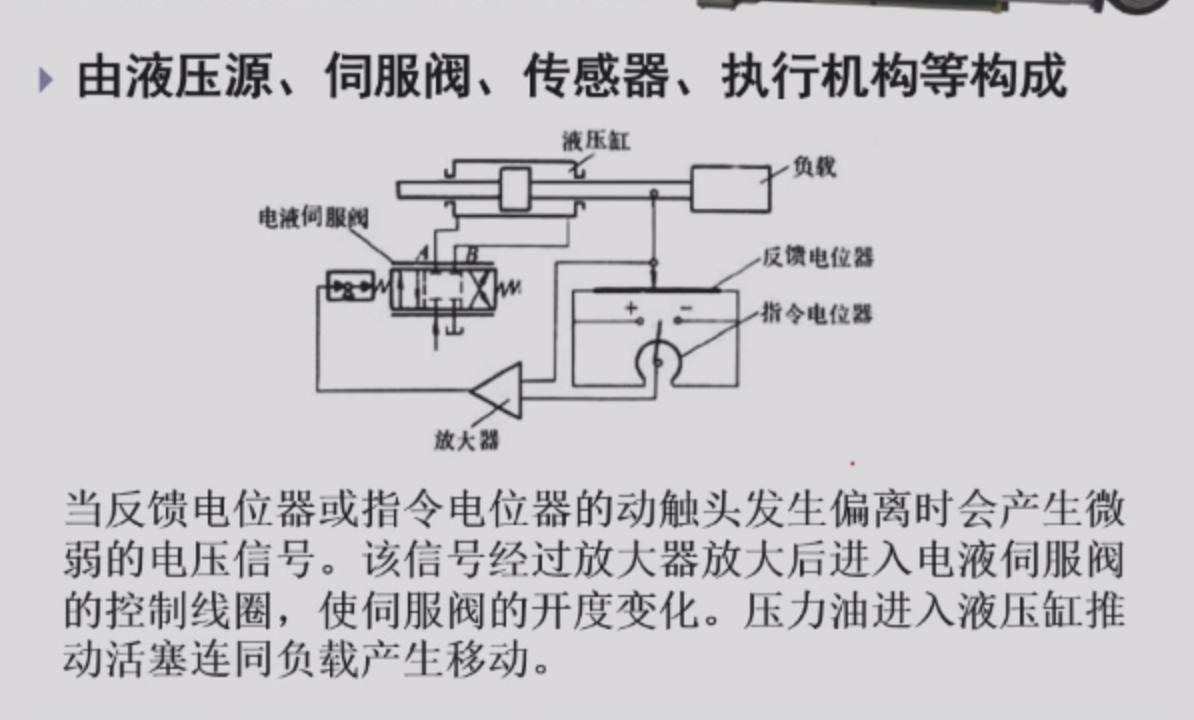
液压驱动¶
液压驱动原理¶
组成¶
驱动例子¶

本文总阅读量次