第十一课 机器人视觉
约 472 个字 20 张图片 预计阅读时间 2 分钟
机器人视觉¶
概论¶
- 有时候语言不容易表达一些东西,而图像有时候更加容易表达;
- 人类90%的信息通过视觉的方式传递,人类大脑更善于处理图像;
- 视觉传感器:被动视觉传感器、主动视觉传感器;
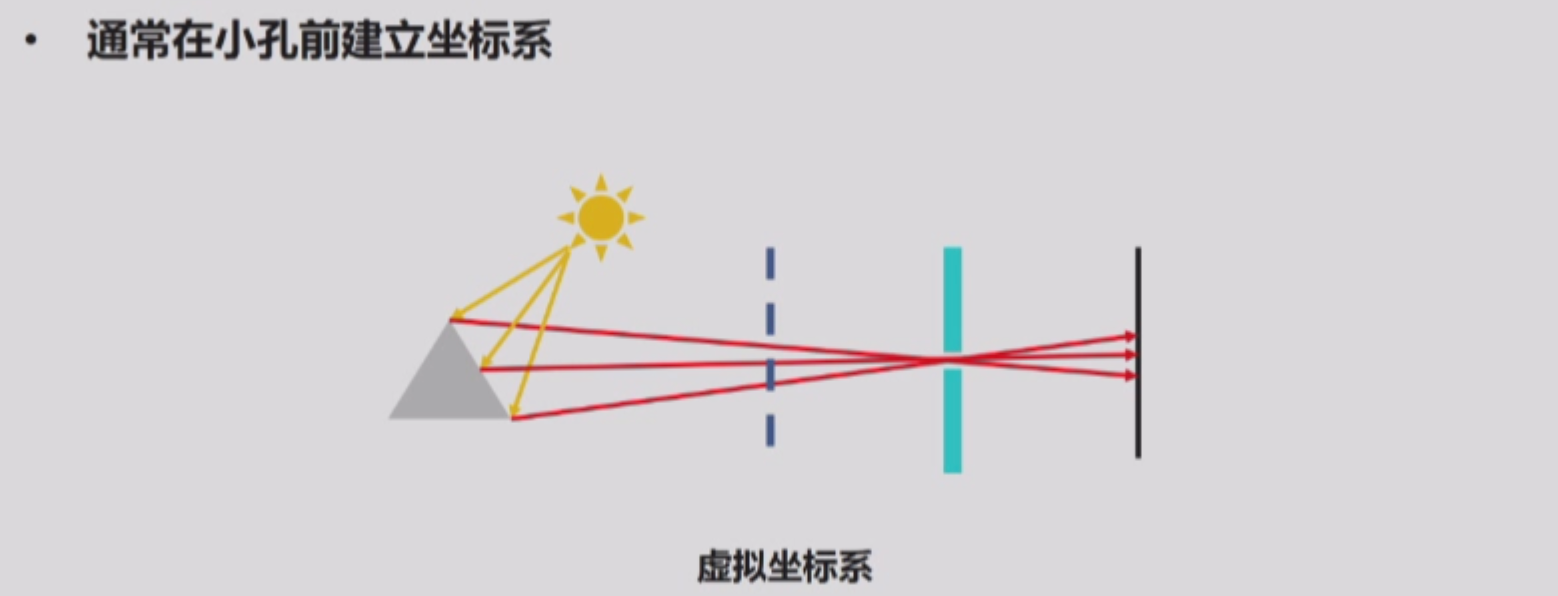
- 被动相机成像的原理(缺点:在外部光弱的情况下无法成像、无法获得物体的深度)
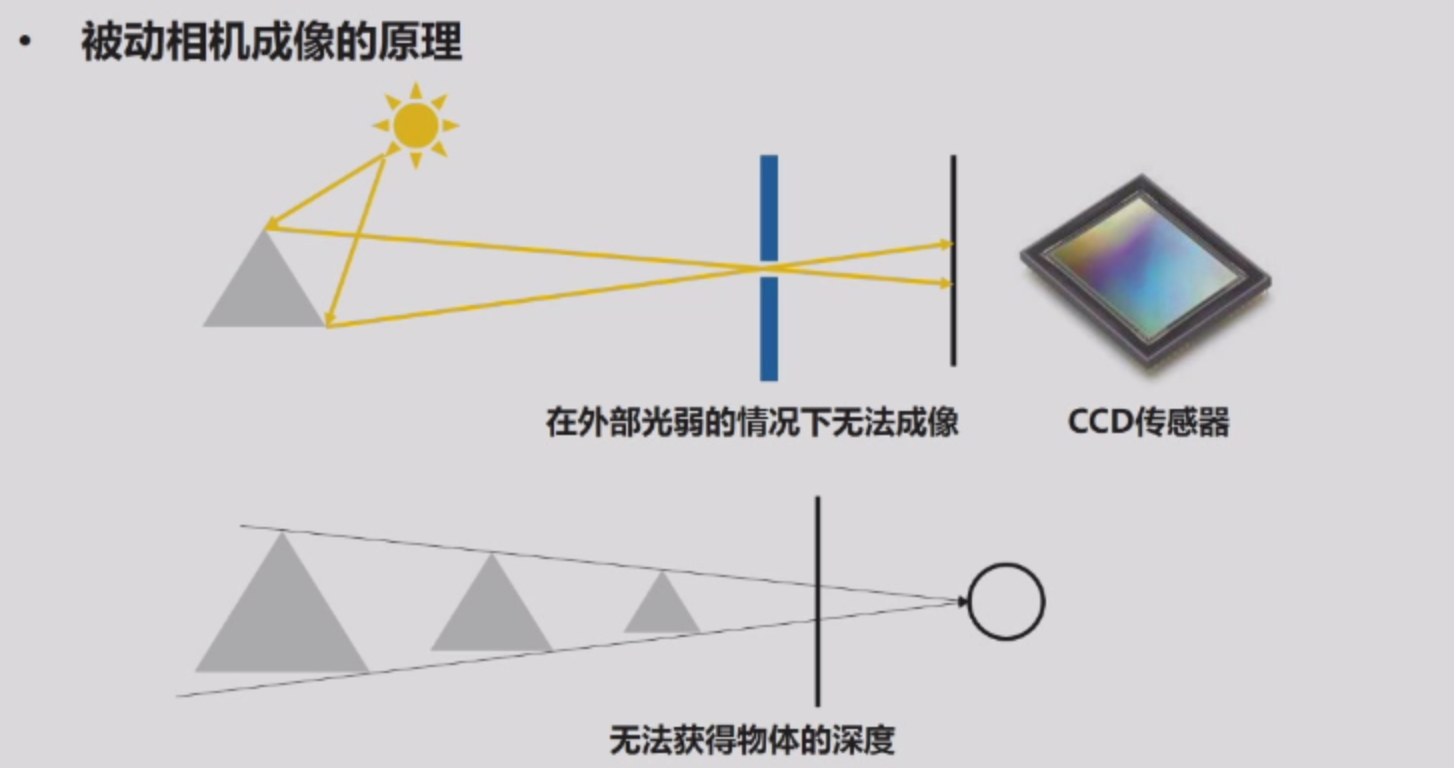
- 一对被动视觉传感器,能够构成一套双目相机,模拟人的双目,获得深度;
- 在一只眼睛上装灯;
- 被动相机成像的原理(缺点:在外部光弱的情况下无法成像、无法获得物体的深度)
- 机器人视觉应用:视觉提供了一种几何测量工具,也提供一种语义认知的工具;
- 异常检测和图像分析:划痕检测、土壤分析;
- 物体检测与识别:表记读数、文字识别;
- 物体分割和识别:病灶检测、人脸识别;
- 人机交互:手势分析、疲劳识别;
- 扫描测绘:工件建模、地形测绘;
- 环境理解:车辆预测、场景解析;
- 增强/虚拟现实:虚拟渲染、头手跟踪;
- 其他应用,娱乐……
-
机器人视觉的挑战:
- 灰度信息与几何语义信息间存在鸿沟;
- 灰度信息受到太多外界因素干扰,并且几何语义空间本身又很大;
-
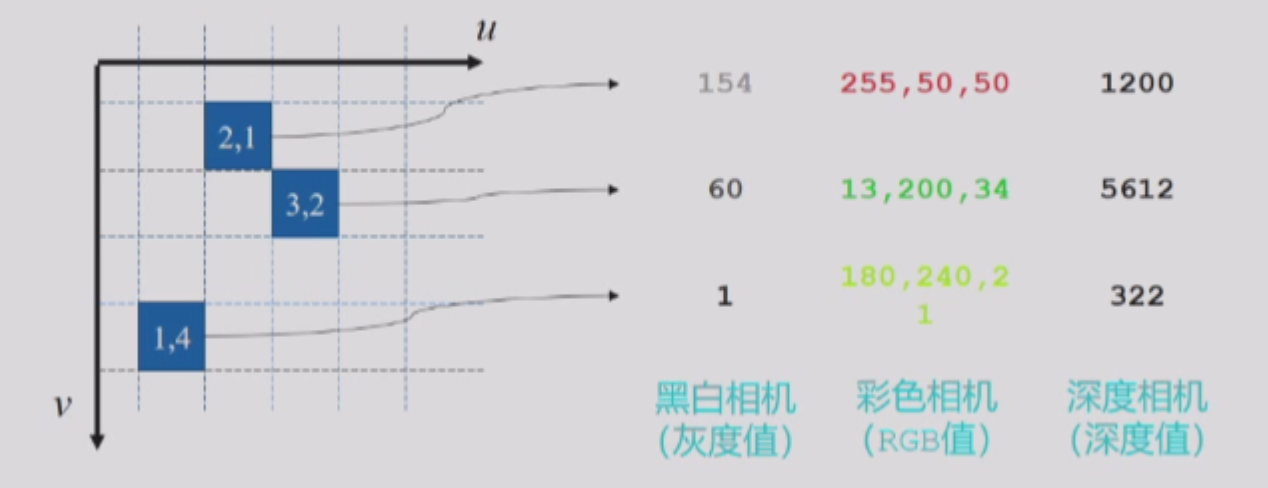
图像是定义在CCD阵列下的离散函数:
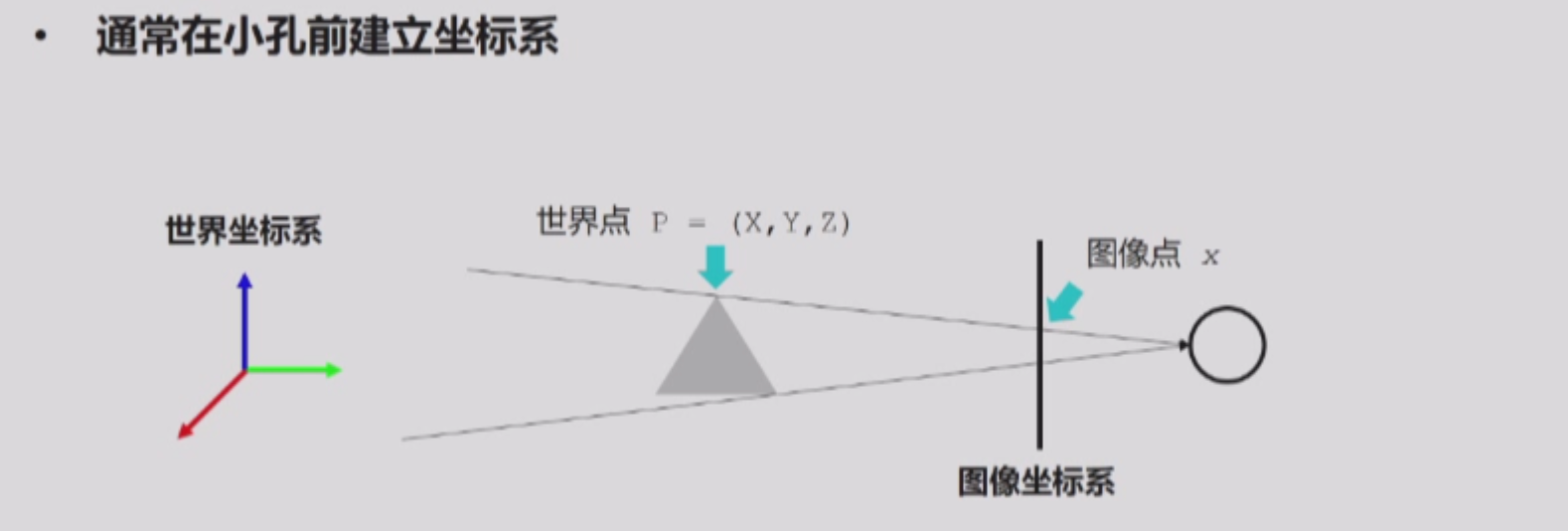
- 像素的位置,涵盖了几何信息:同一个物理世界的点,成像到不同图像位置,能够反映空间关系;
- 像素的取值,涵盖了灰度信息:同一个物理世界的点,成像到不同图像位置,对应灰度信息类似;
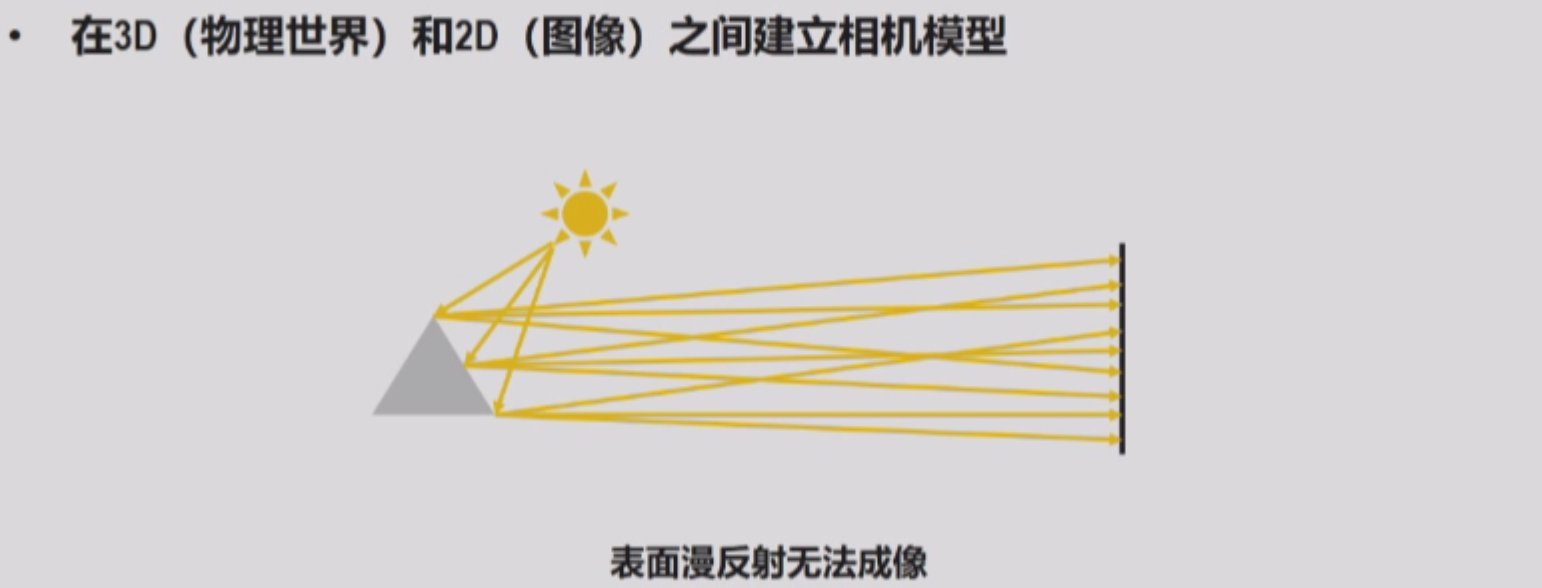
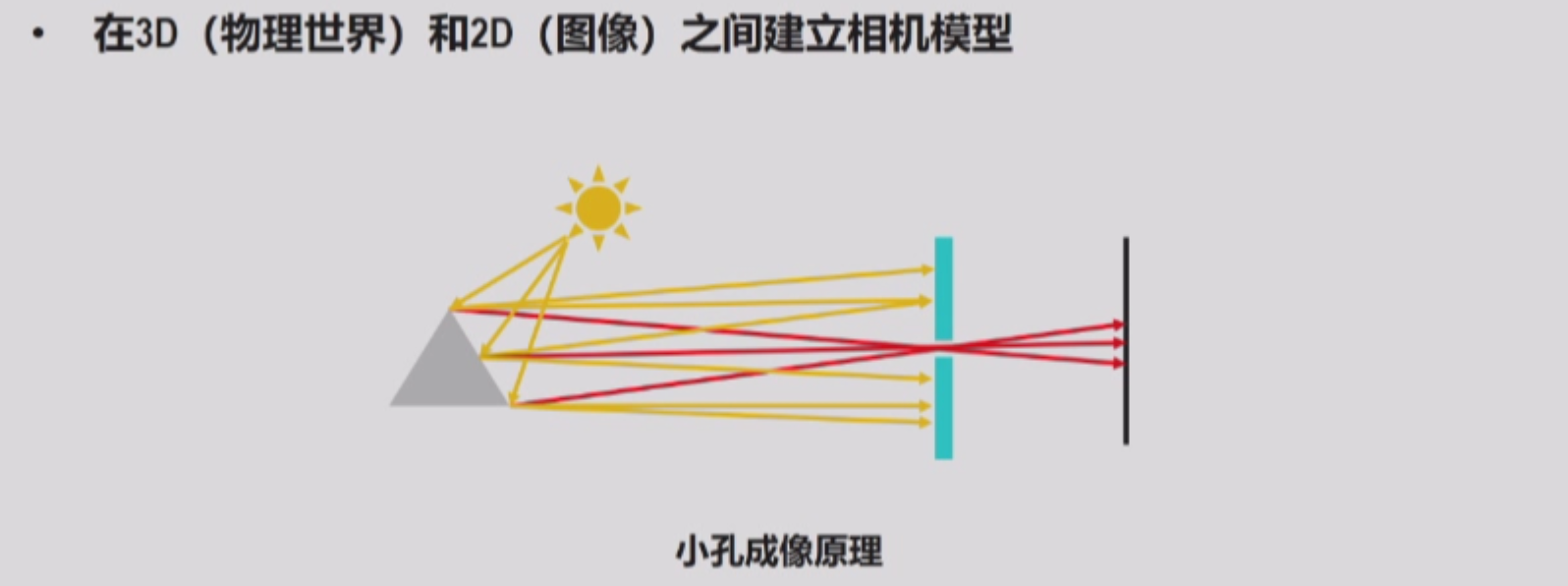
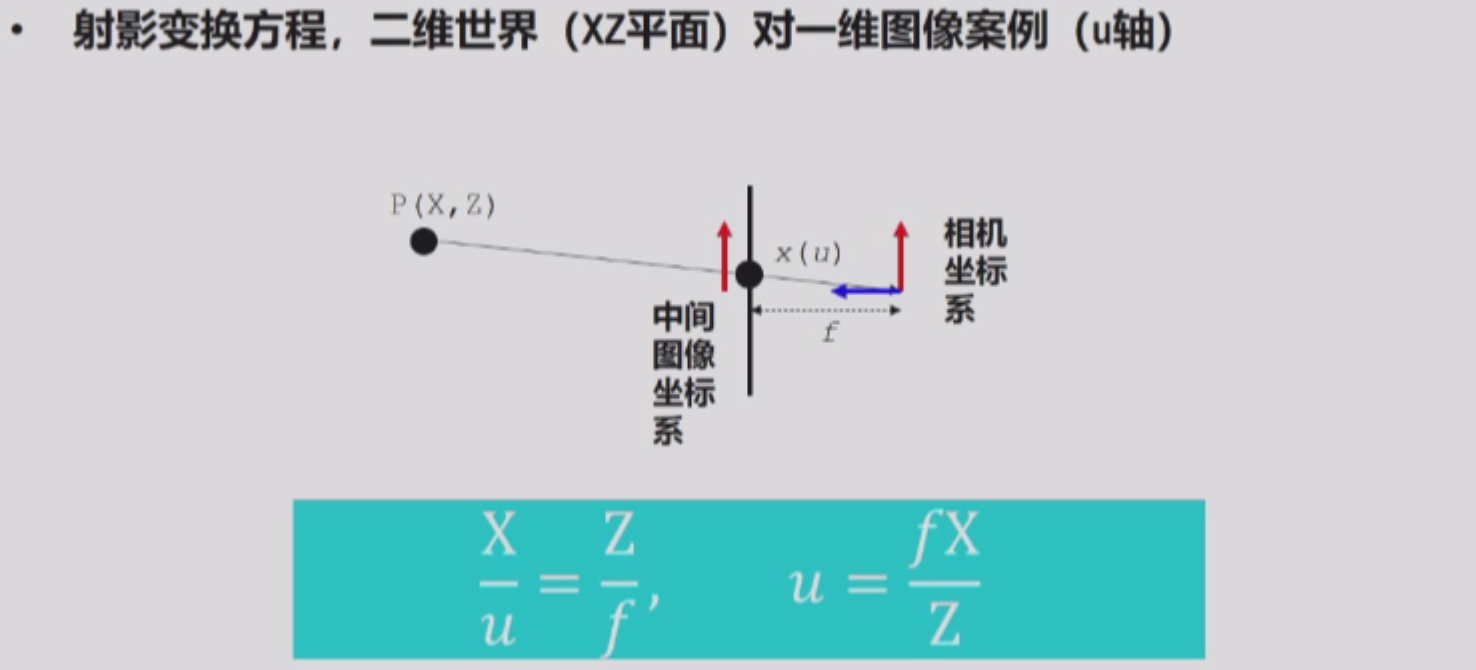
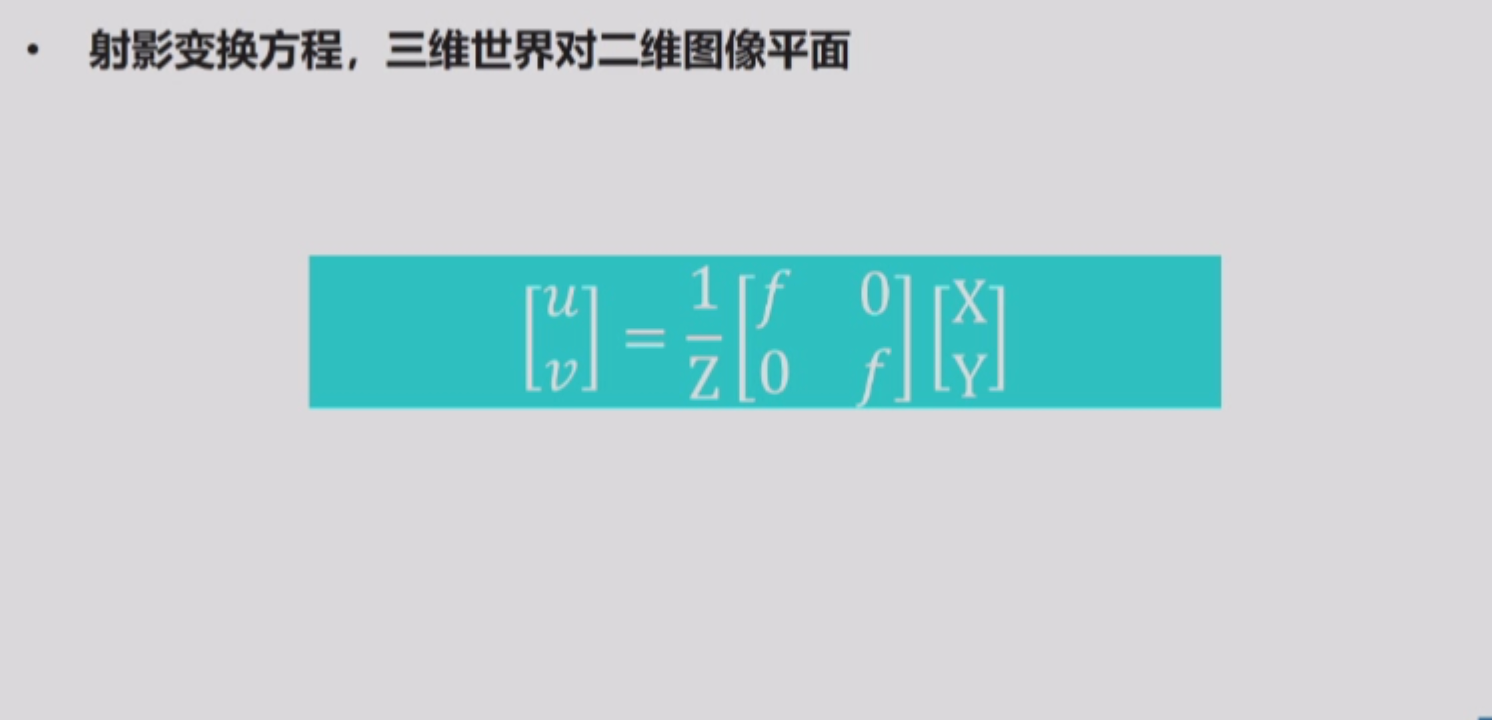
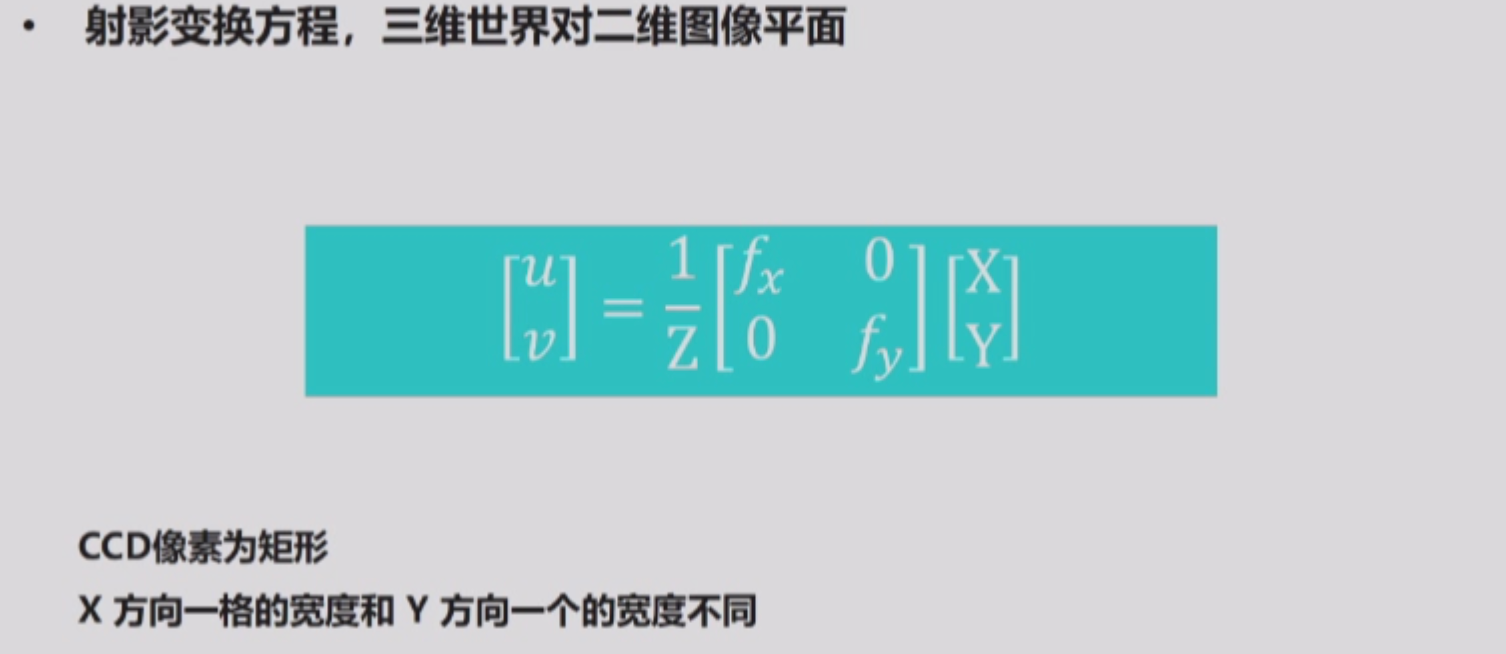
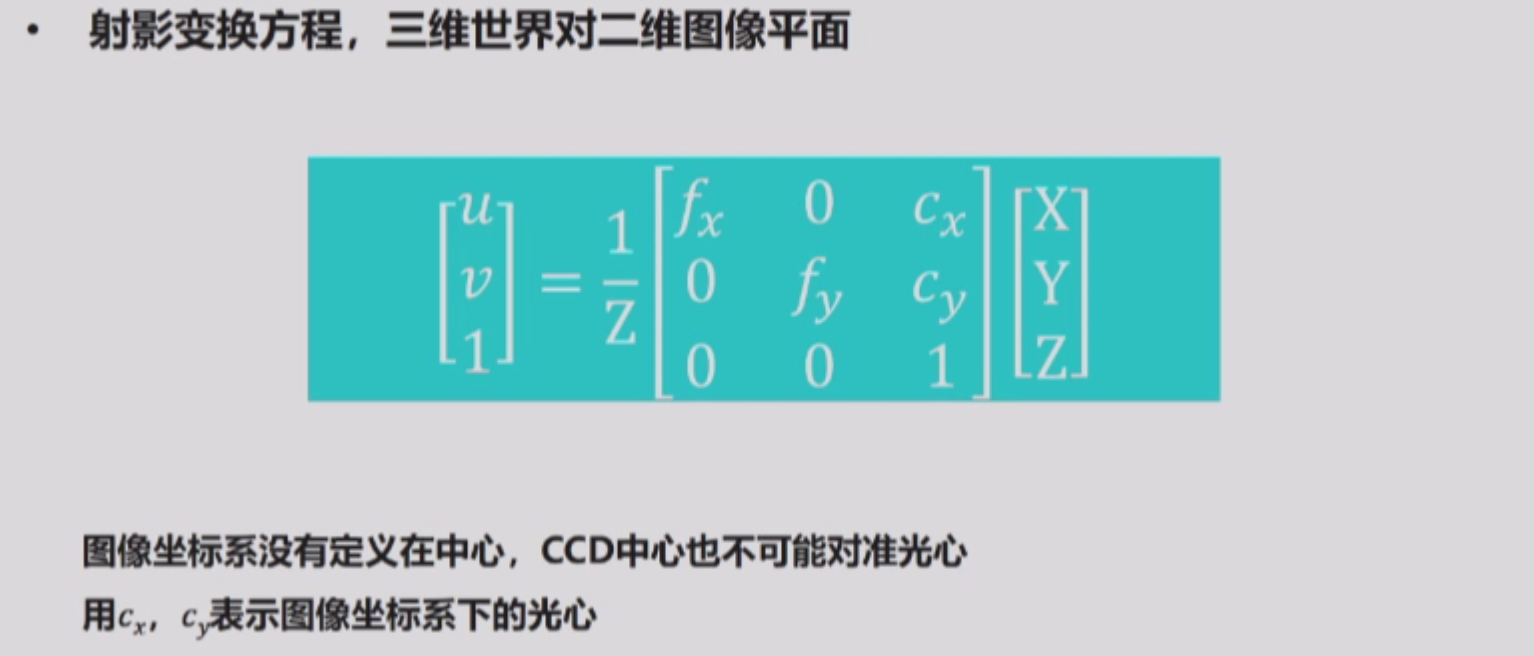
相机建模¶
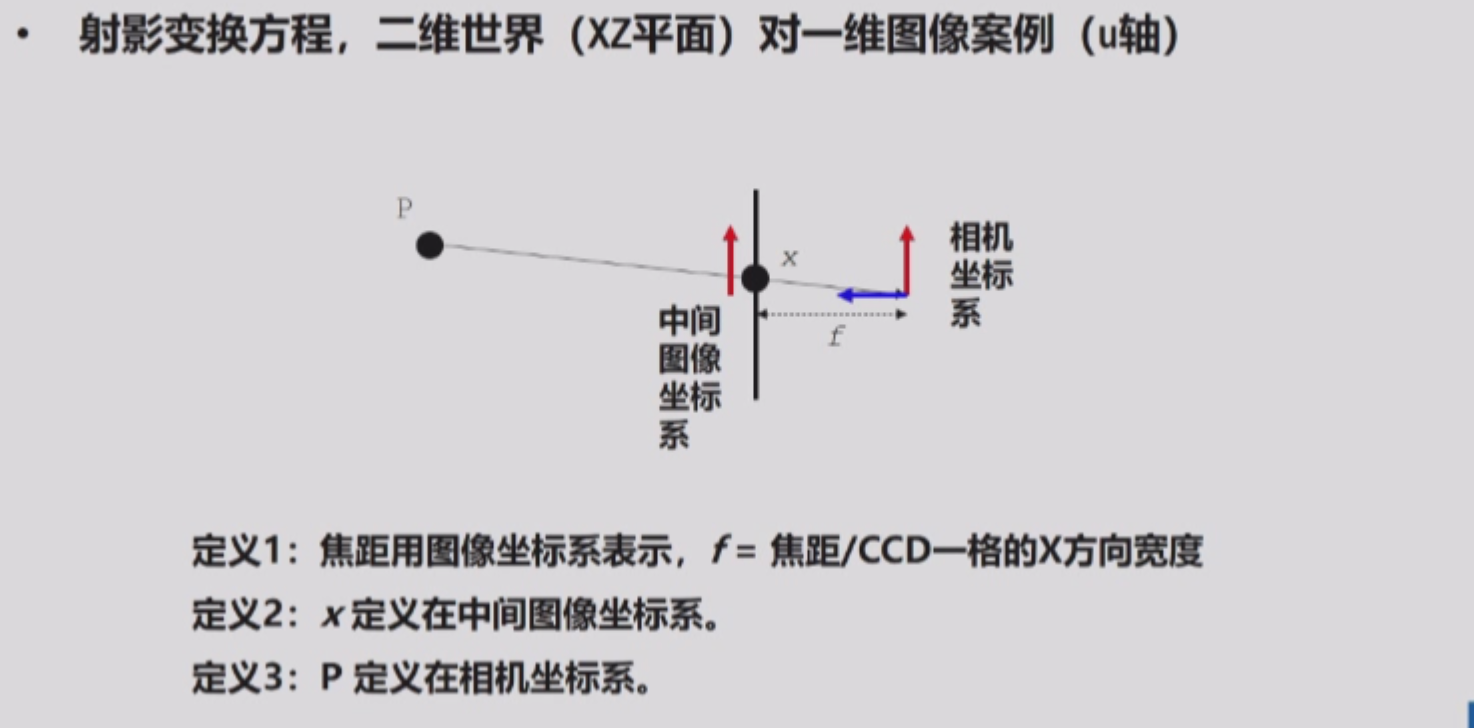
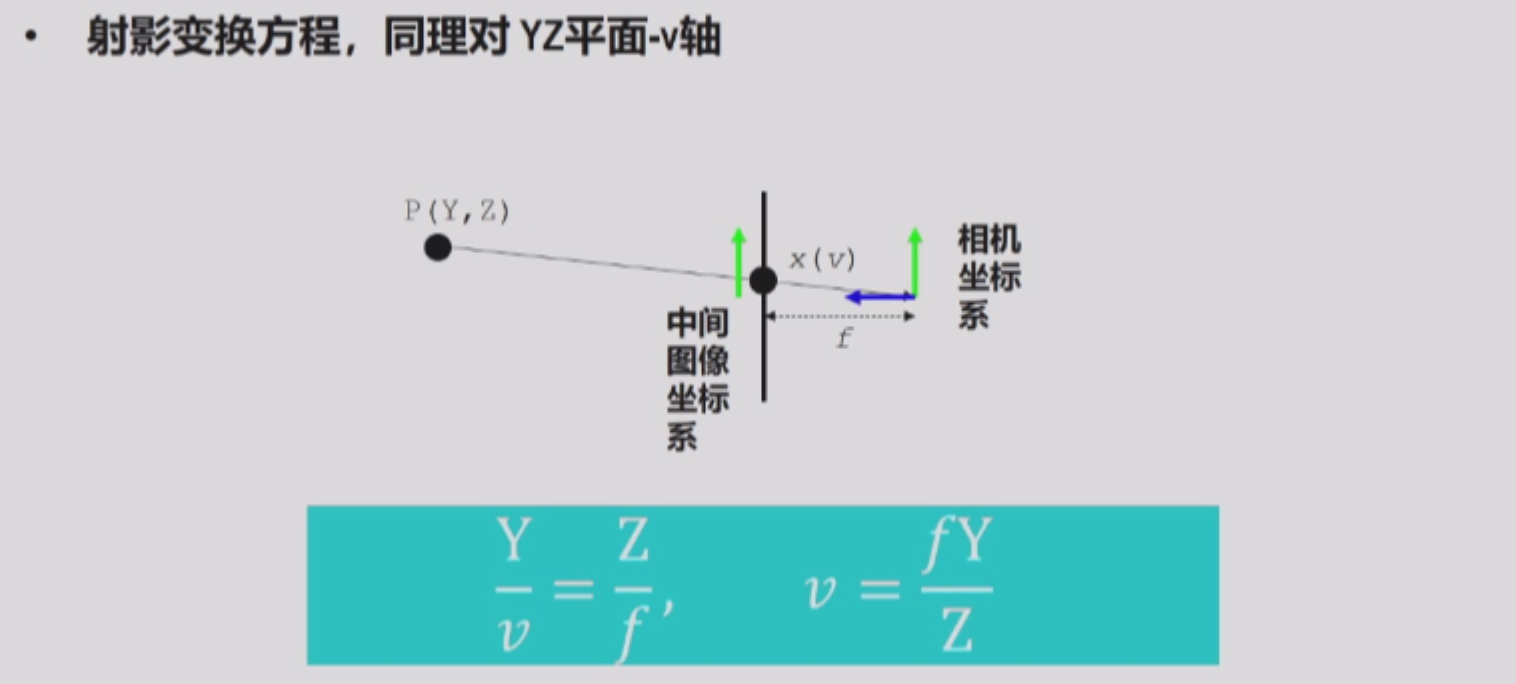
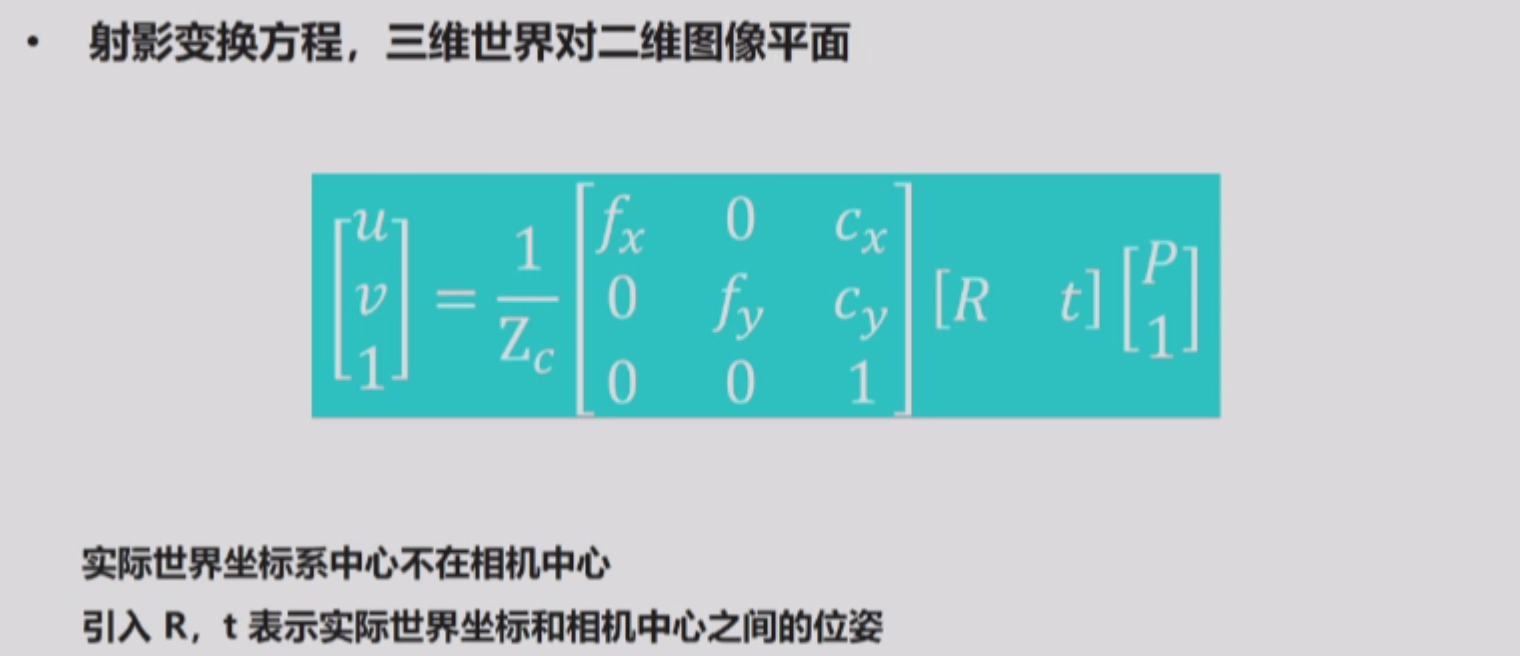
对于同一个相机来说,内参是不会变的,而外参是会因为位置变化而变化的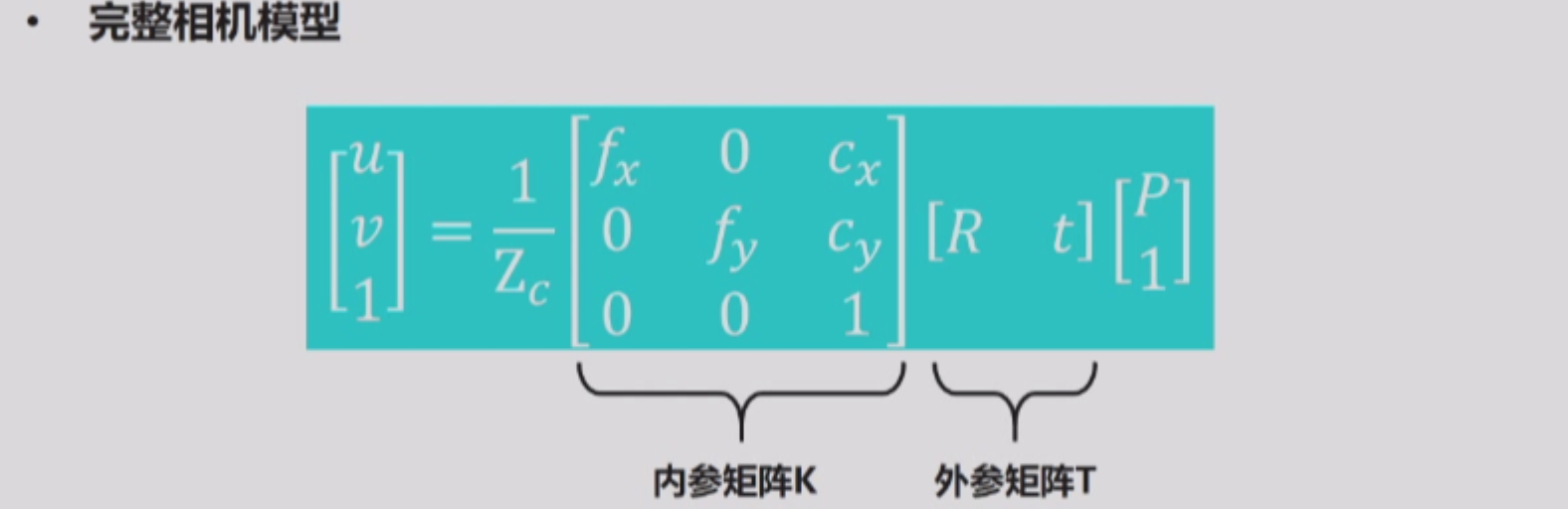
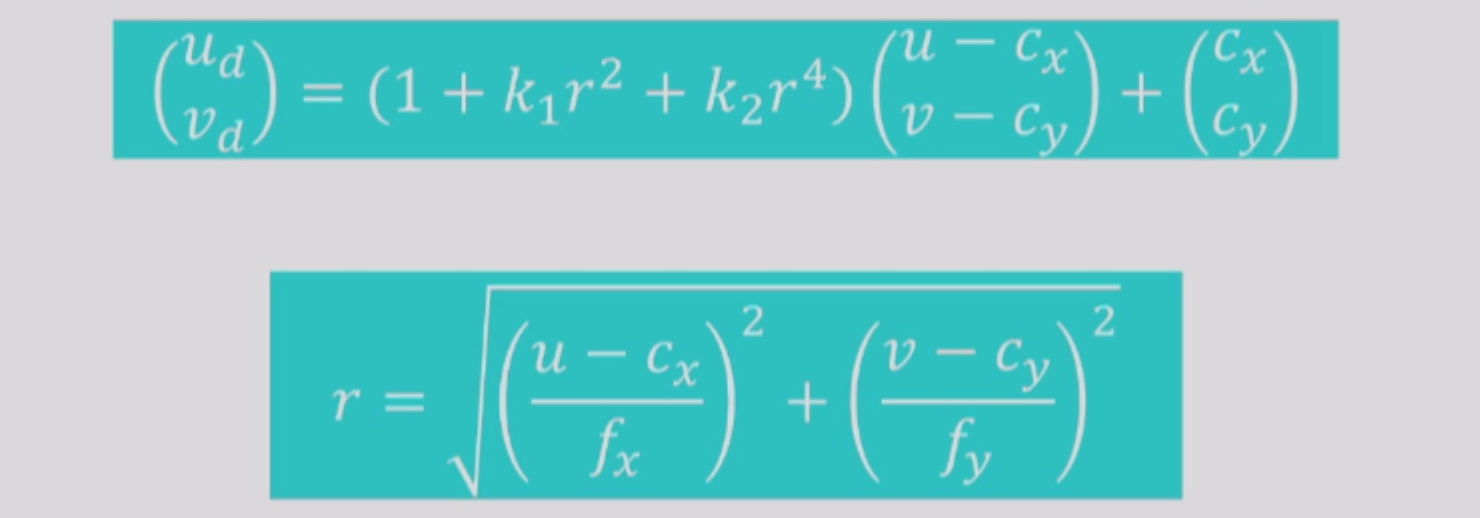
镜头畸变:
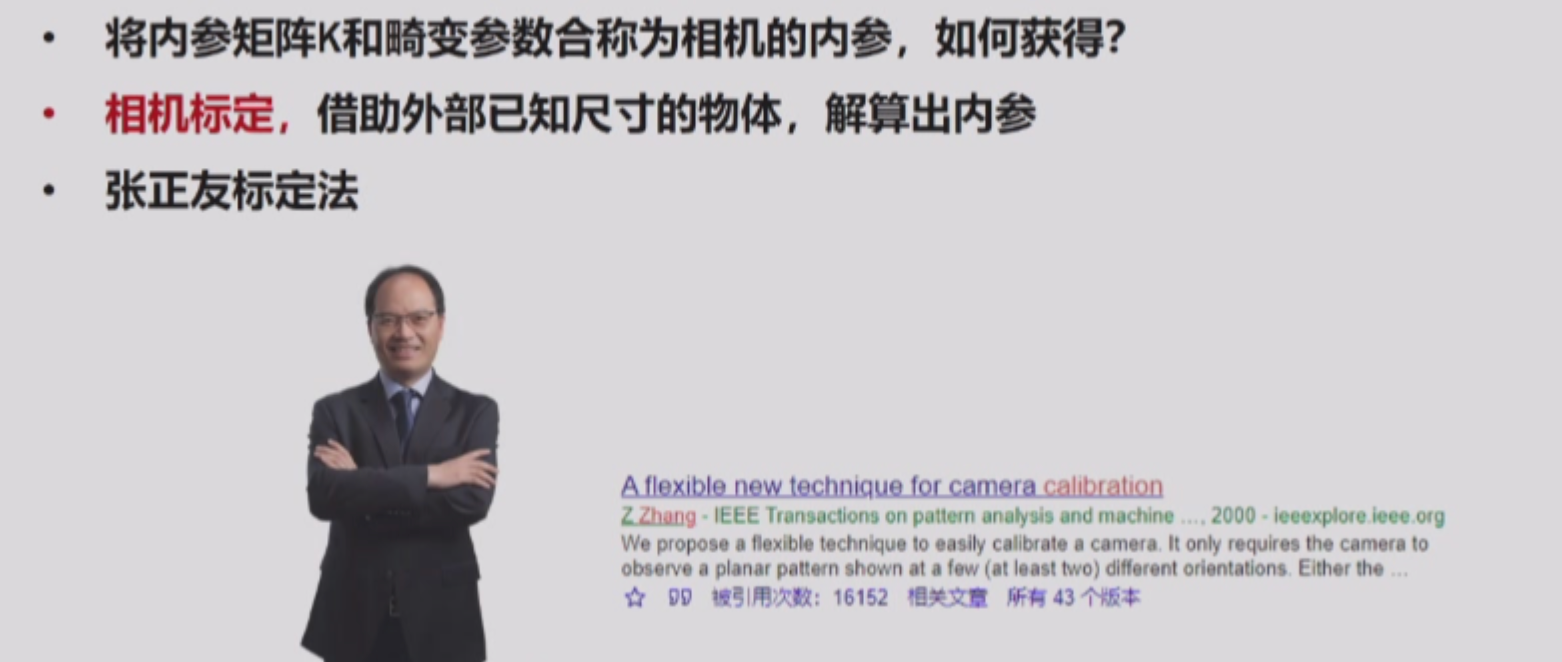
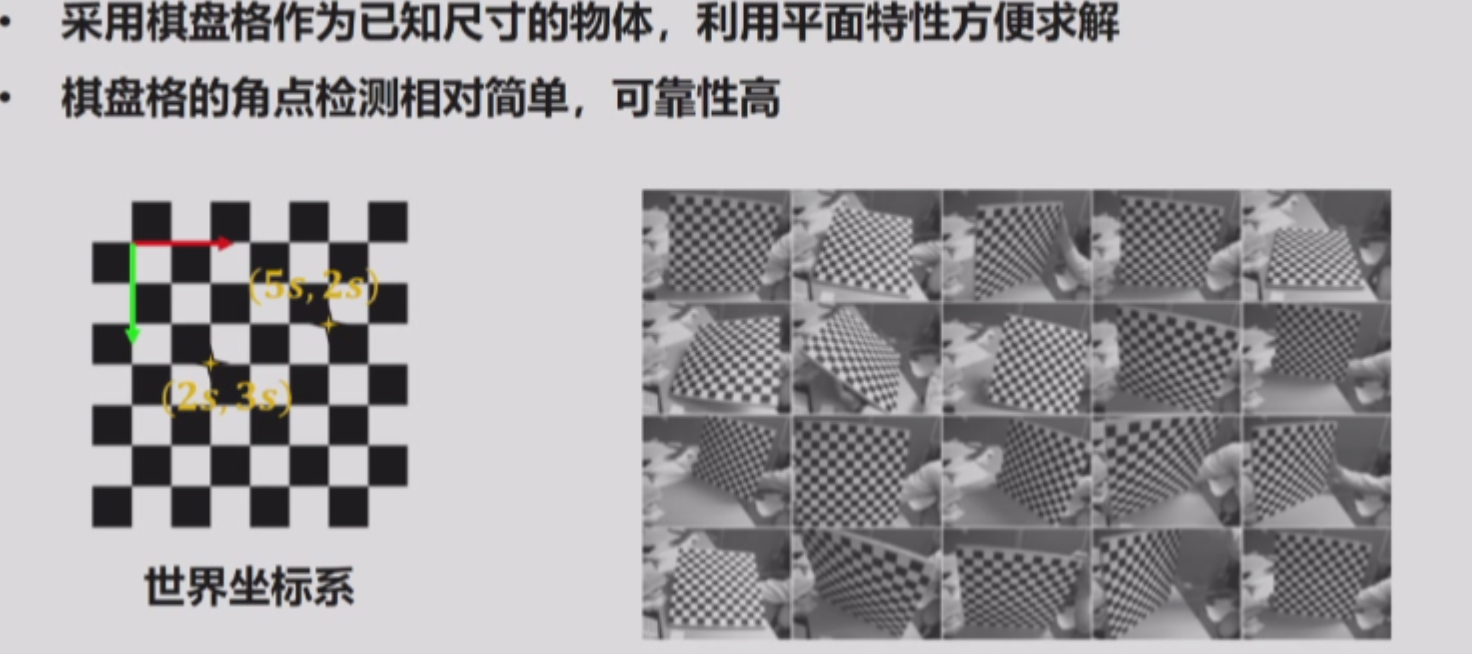
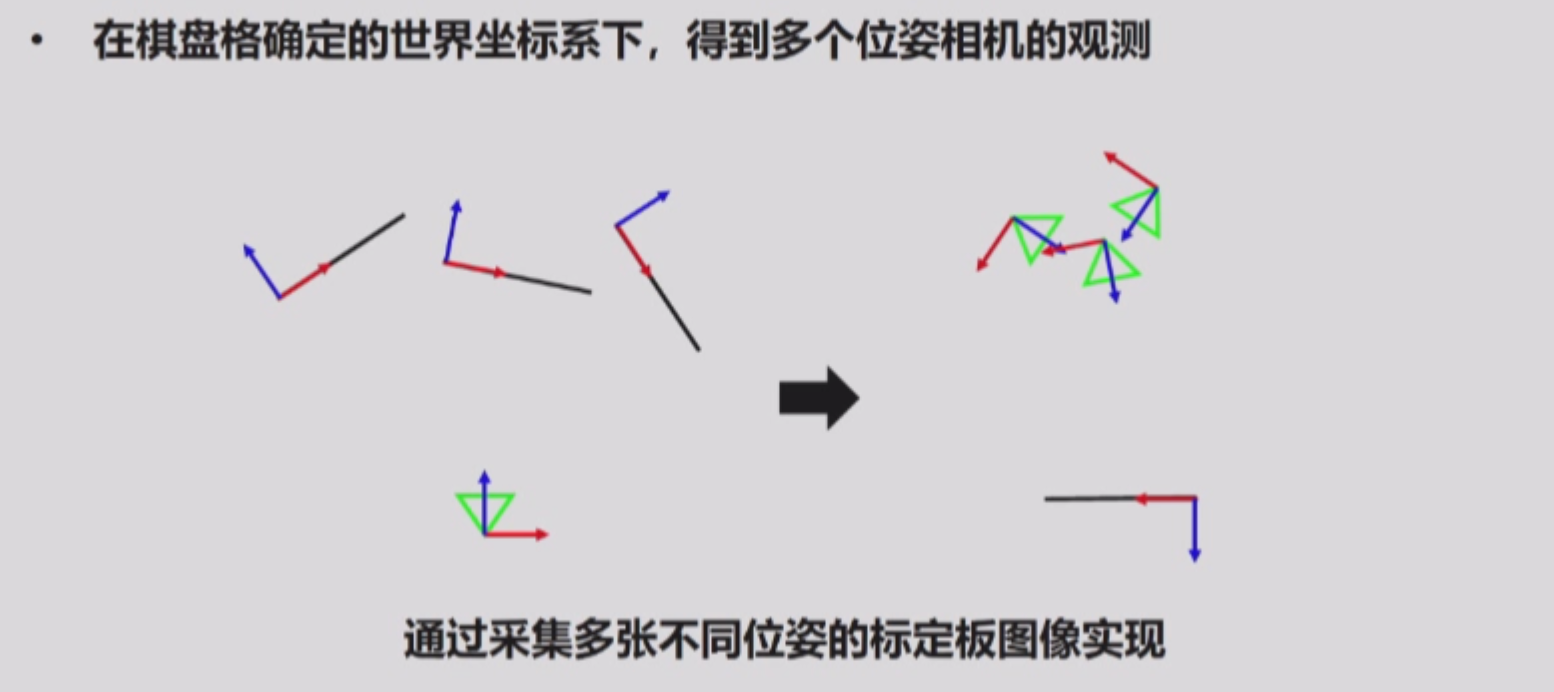
相机标定¶
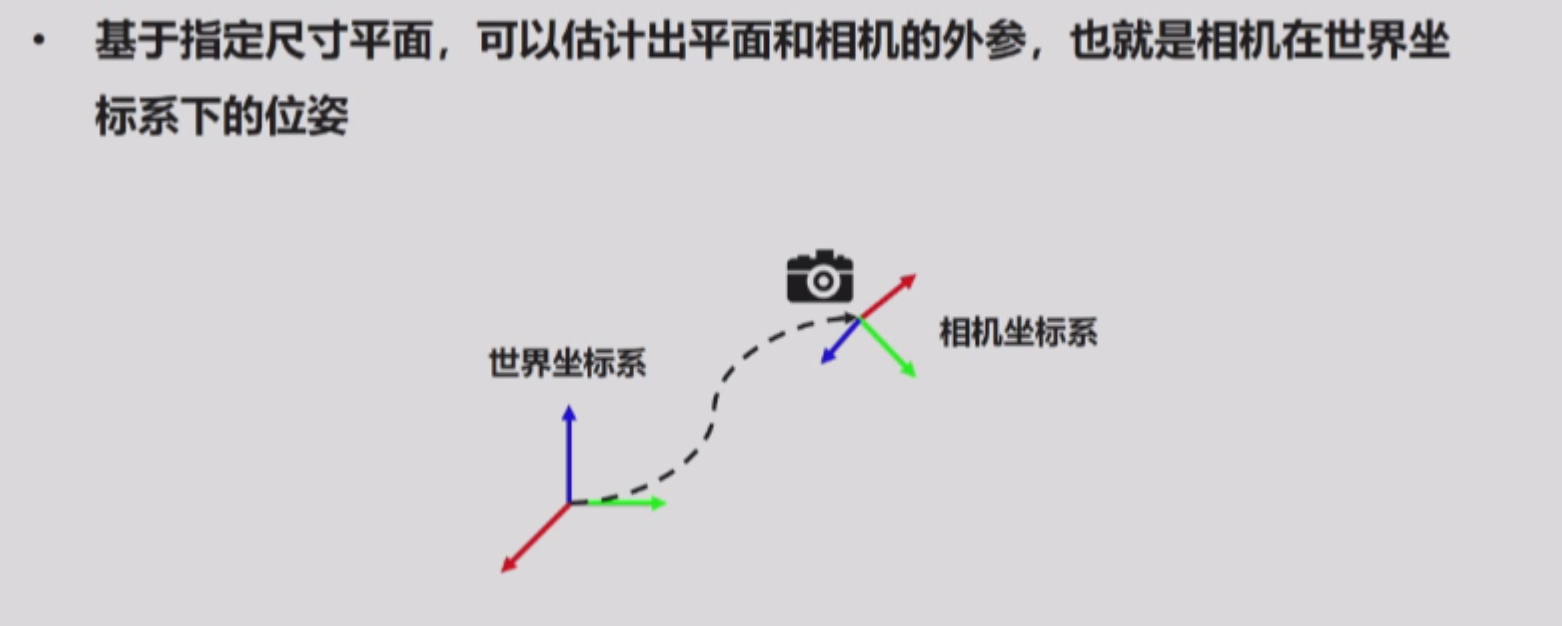
外参应用¶
本文总阅读量次