第十三课 集群
约 960 个字 22 张图片 预计阅读时间 3 分钟
经典集群算法¶
群体行为的特点¶
-
有限的局部信息 群体中的每个个体只能获得有限的局部信息,对群体中其他个体共同参与构建的结构没有全局性的了解。
-
简单的个体规则 每个个体仅遵从一些简单的行为规则,这套规则允许群体协调其活动,并建立一个全局结构或构型。
-
全局结构涌现出有利的功能 这些结构使群体能够解决一些个体无法完成的问题,并体现出灵活性和鲁棒性。
从自然界到人工系统¶
- 从微观系统到宏观系统的转变
- 建模人工系统感知和决策机制
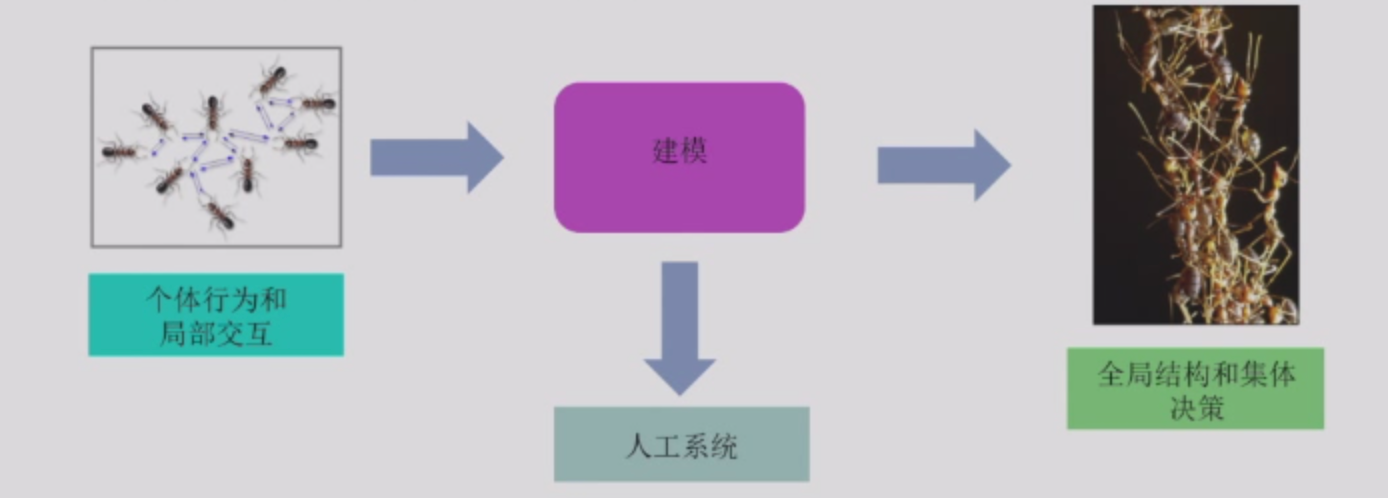
群体智能的关键机制¶
群体智能的关键机制:通过局部的个体之间相互作用涌现 出具有全局效果的结构;
指定系统个体之间交互的规则是在局部信息的基础上执行 的,而不参考全局模式,这是系统的一种涌现属性,而不 是外部排序影响强加给系统的属性:
-
聚合(Aggregation) 集合在一起,不要分开太远。
-
图案形成(Pattern Formation) 用很多个微观个体表现出一个宏观事物。
-
自组装(Self-assembly) 多个机器人自己组合在一起。
-
群体搬运(Collective Transport) 个体合作搬运重物(个人无法完成的任务)。
-
群体探索(Collective Exploration) 个体专注于覆盖一个区域以寻找资源,然后利用发现的路径来开发资源。
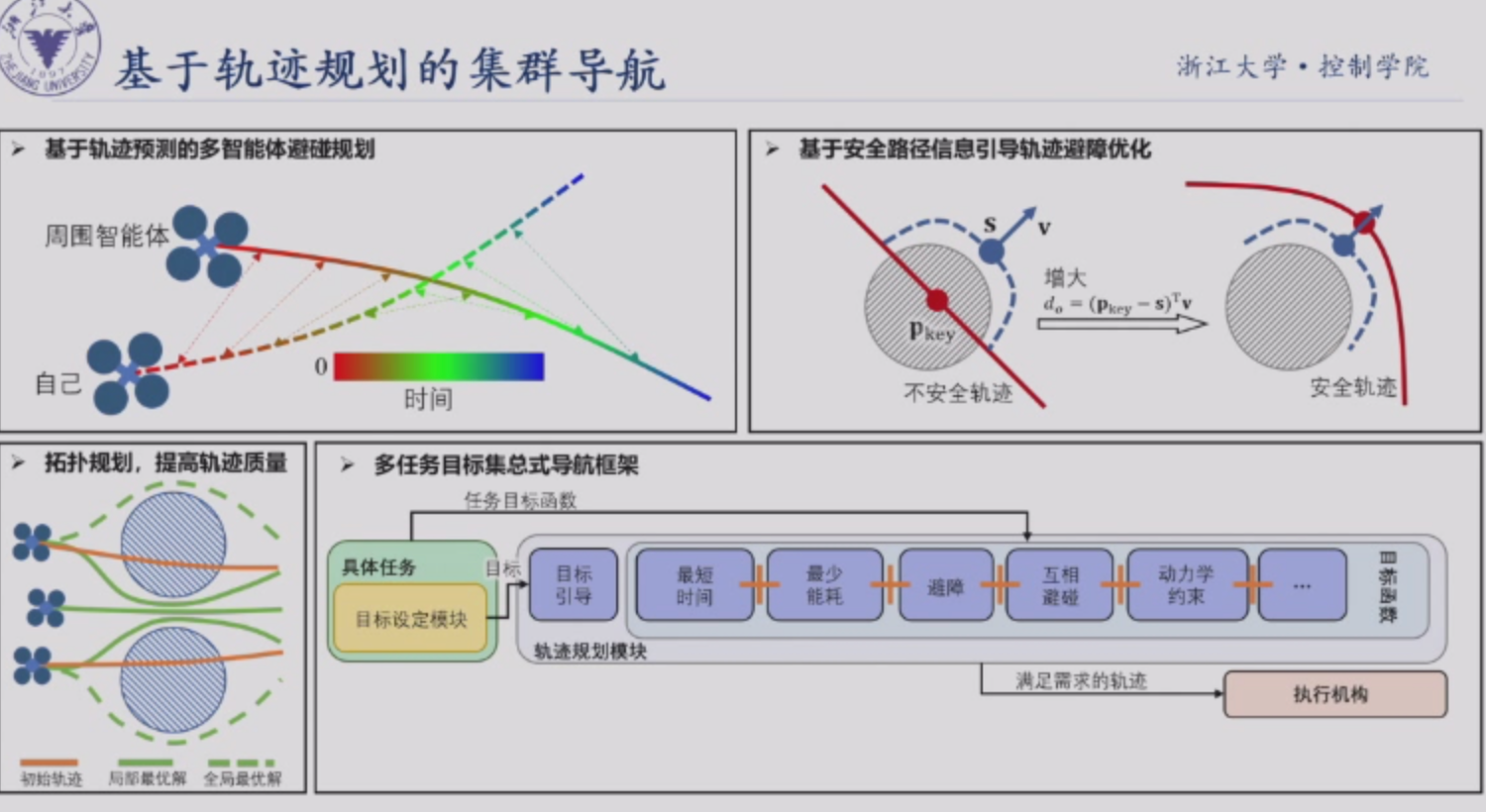
经典集群导航算法¶
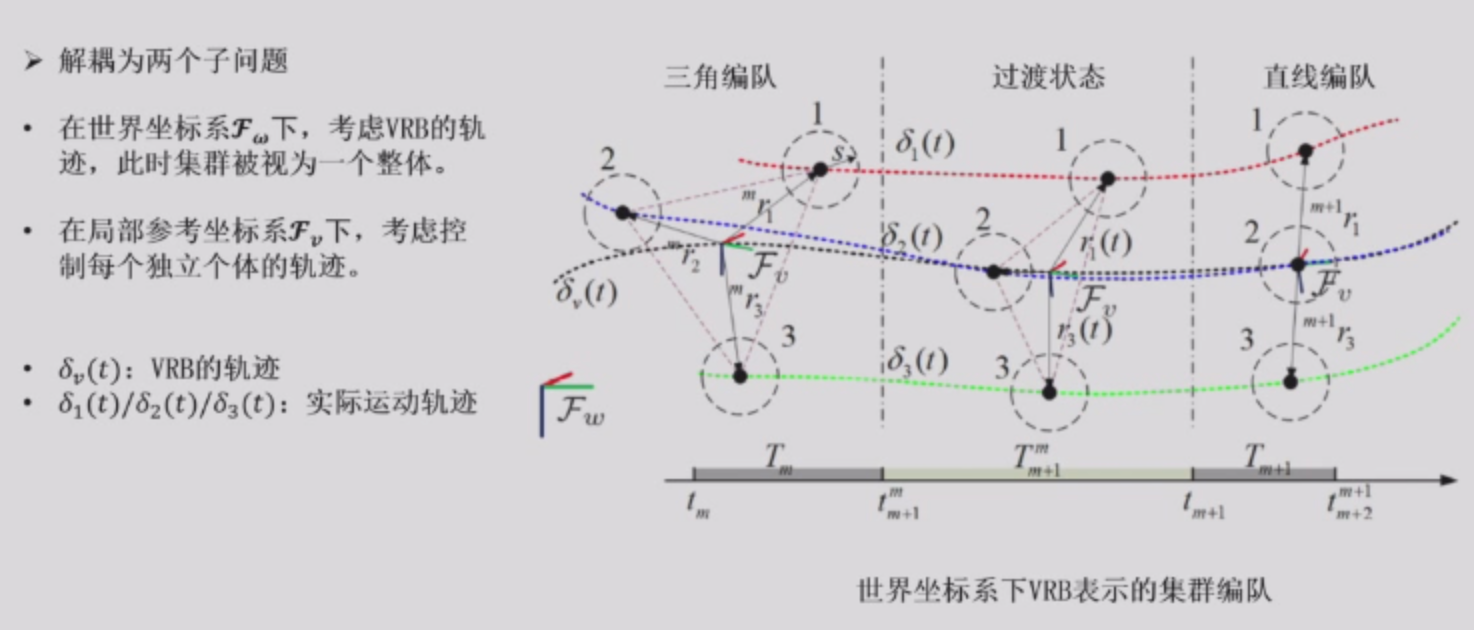
1. 基于Virtual Structures的编队控制¶
核心思想¶
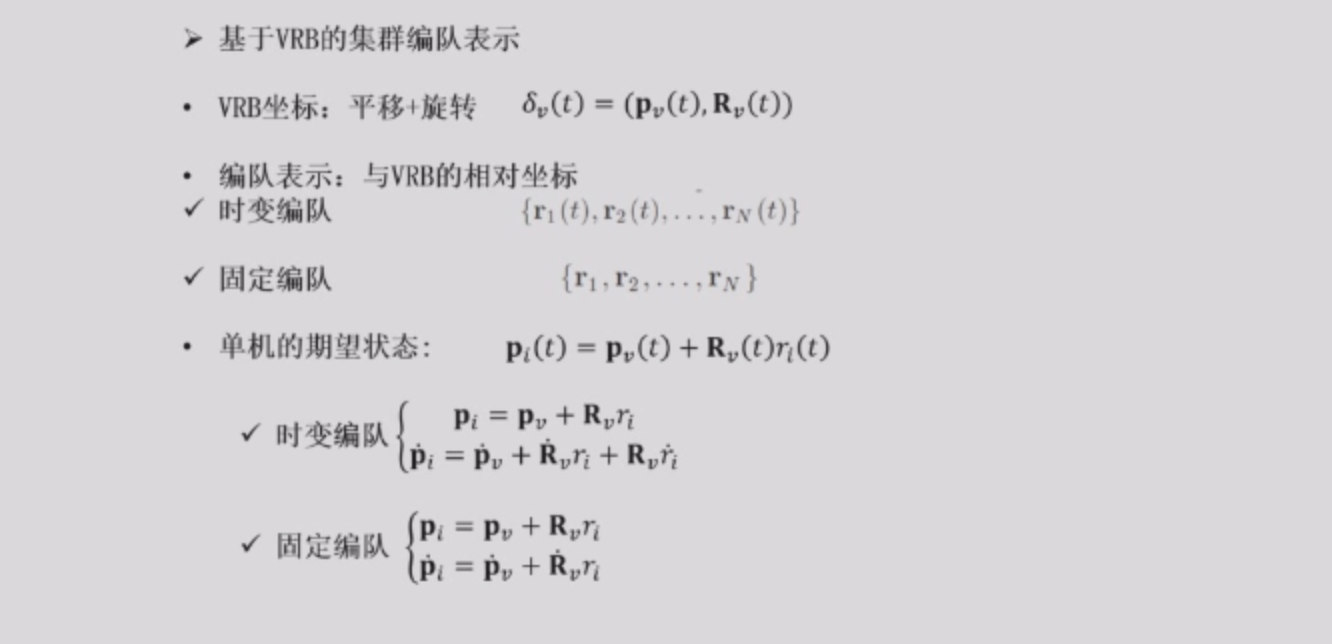
- 集群编队结构表示:将整个集群用virtual structure表示为一个世界坐标系下的整体(virtual rigid body,VRB);
- 多目标需求:基于势场法表示集群中每架无人机编队保持、相互躲避、障碍物避障的需求;
- 控制:在VRB坐标系下统一上述各个势场得到相应的控制指令。
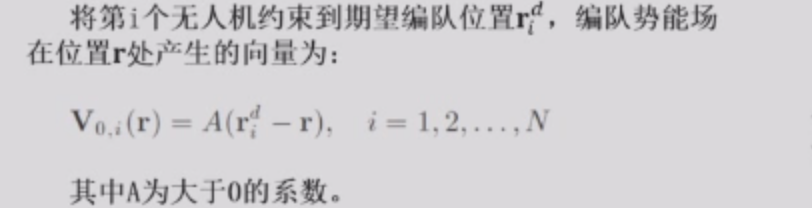
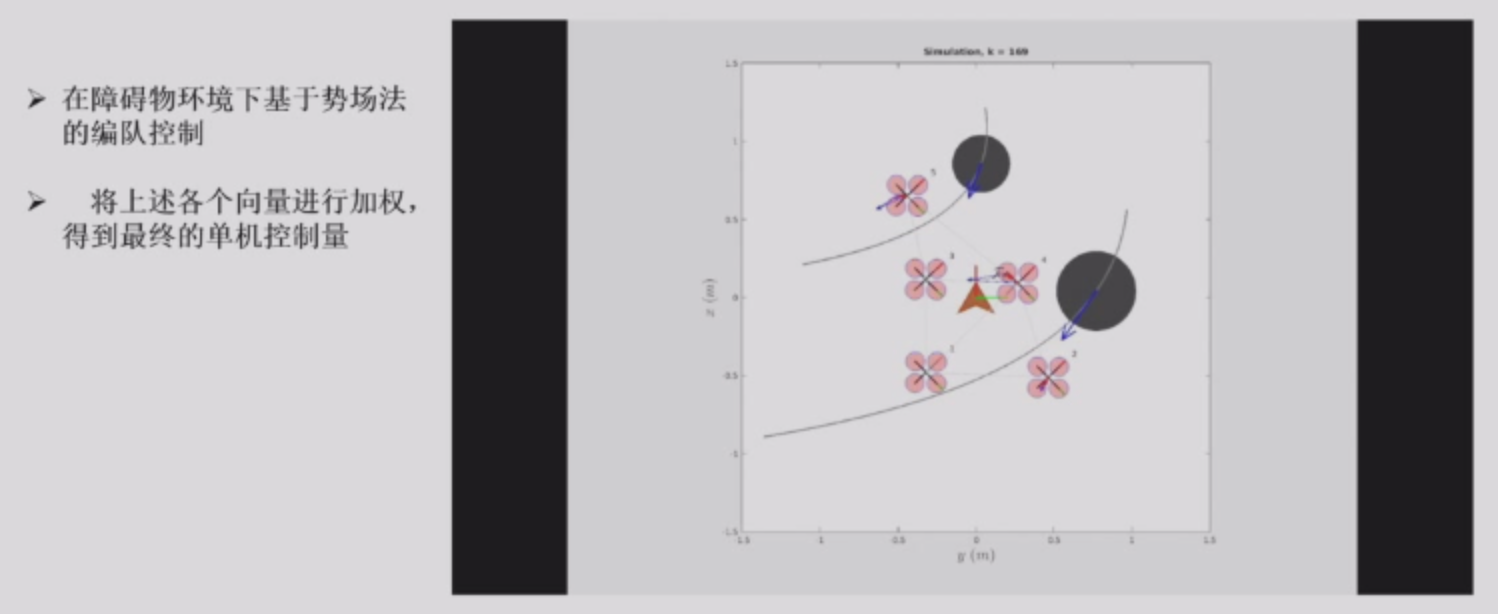
在障碍物环境下基于势场法的编队控制¶
- 编队势能场
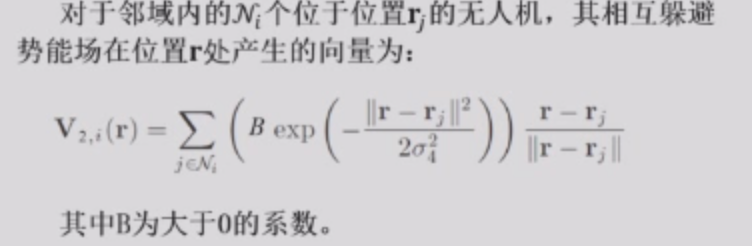
- 相互躲避势能场
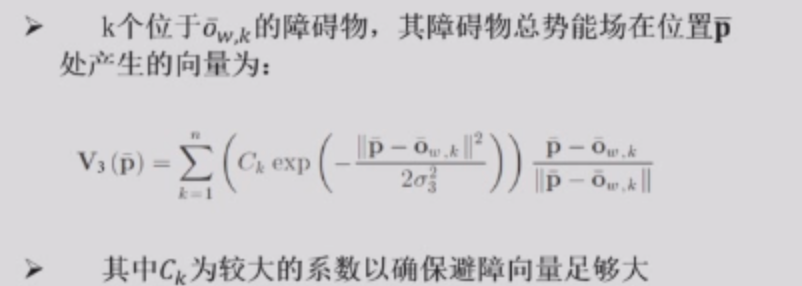
- 障碍物势能场
认为机器人的速度是可以突变的,在速度比较小的时候是可以的,但是如果速度变快了,就不行了。
而且很容易卡住,因为每个机器人只管自己的规划,而且只规划下一步,所以非常短视。
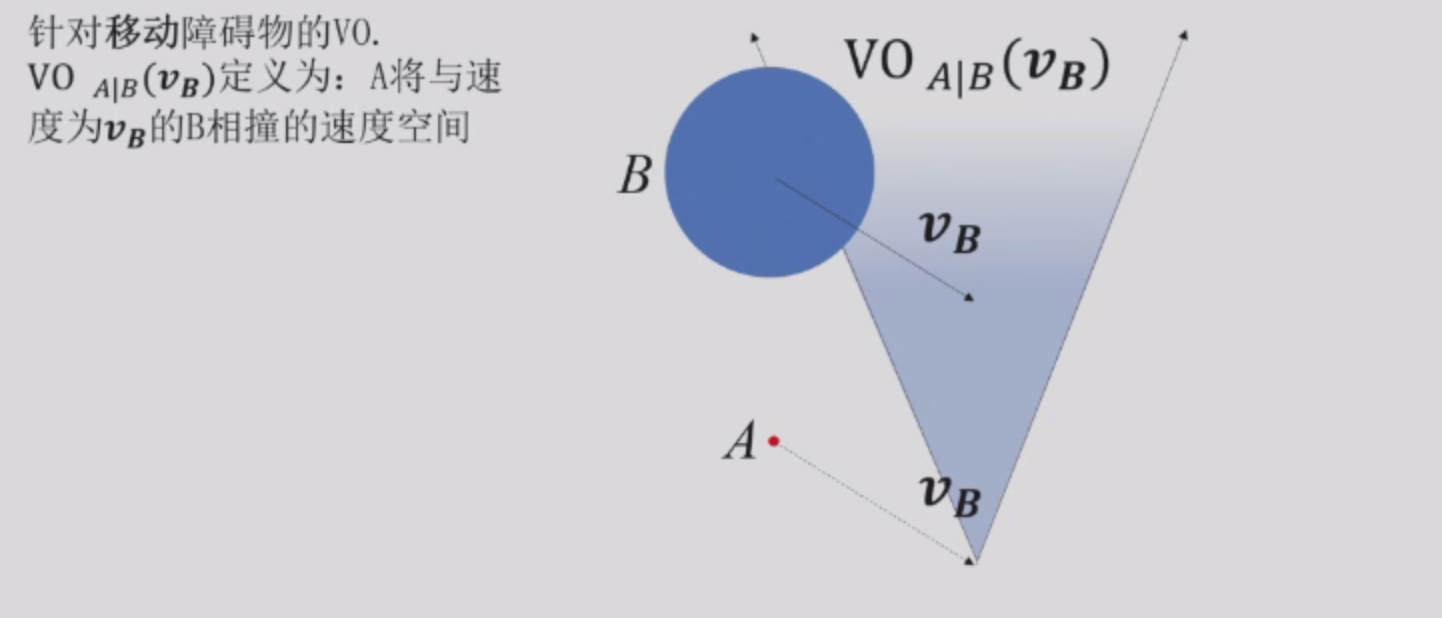
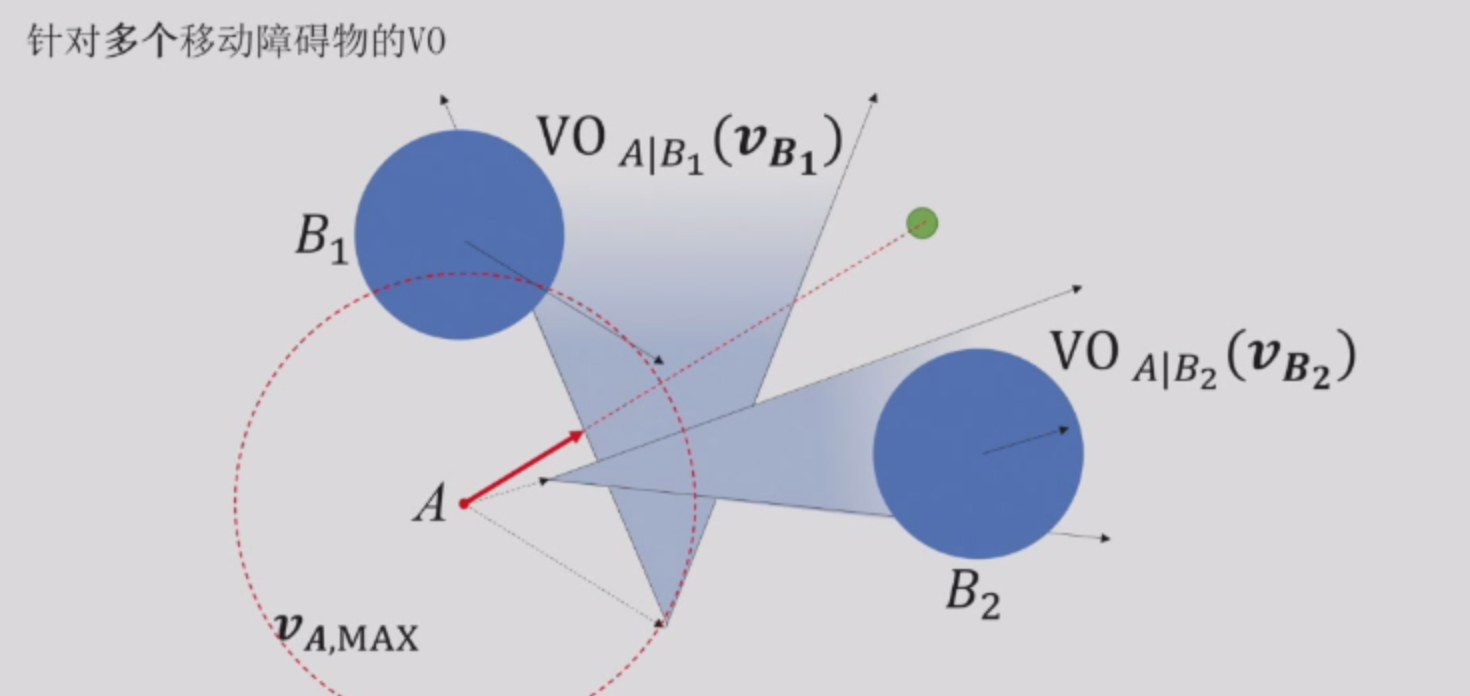
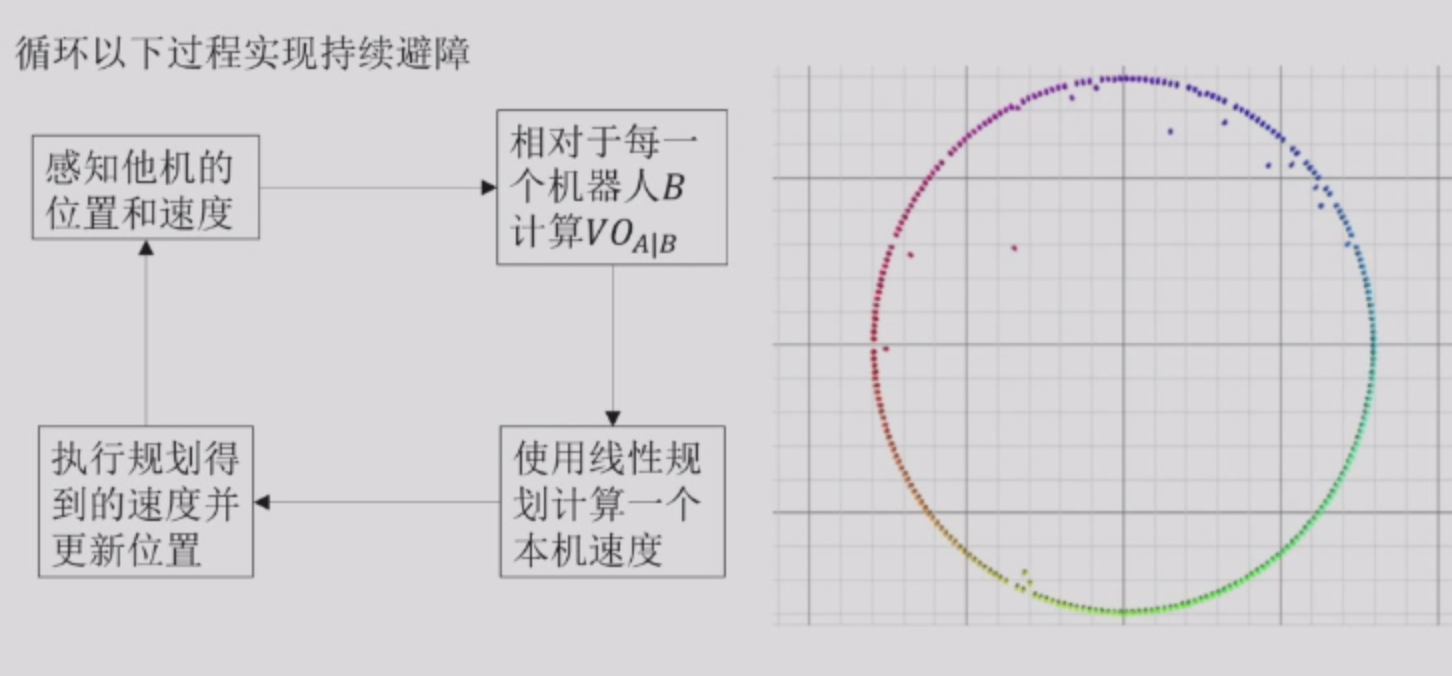
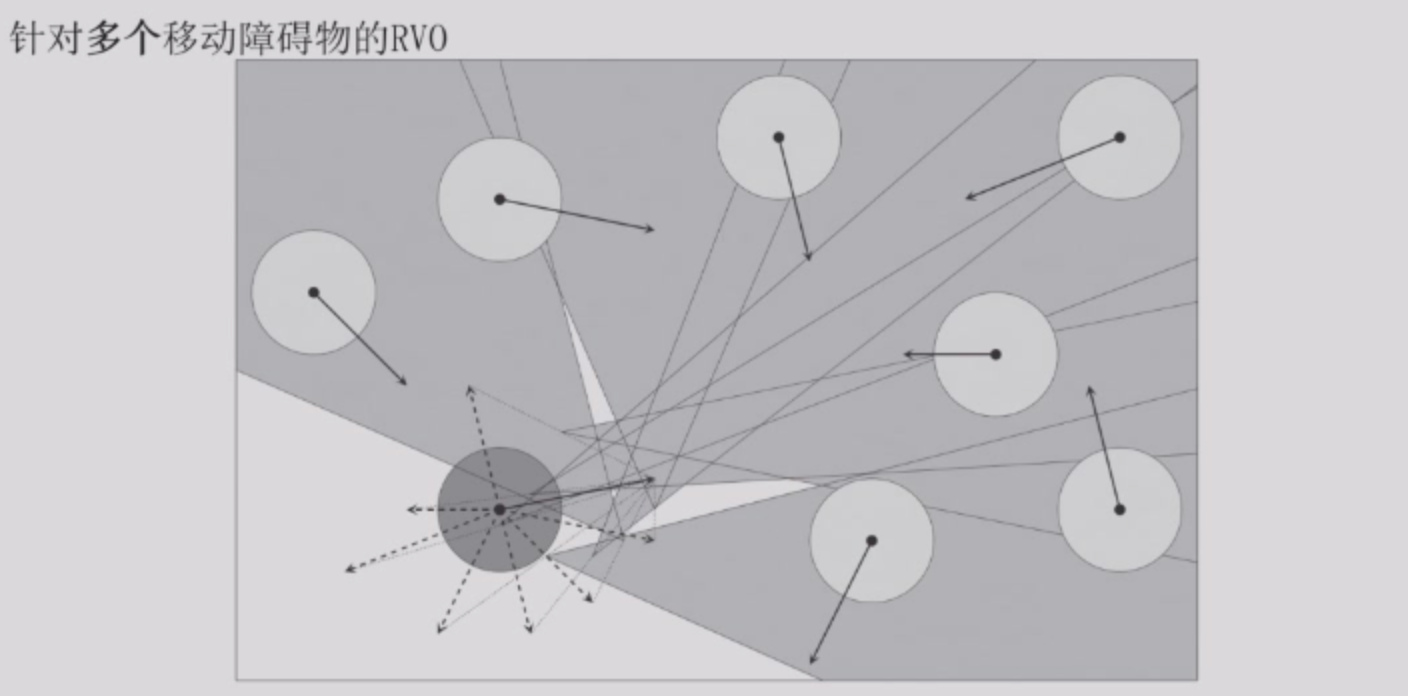
2. 基于速度障碍物(VO)的集群导航算法¶
VO¶
把两个球的关系变成一个点和一个球的关系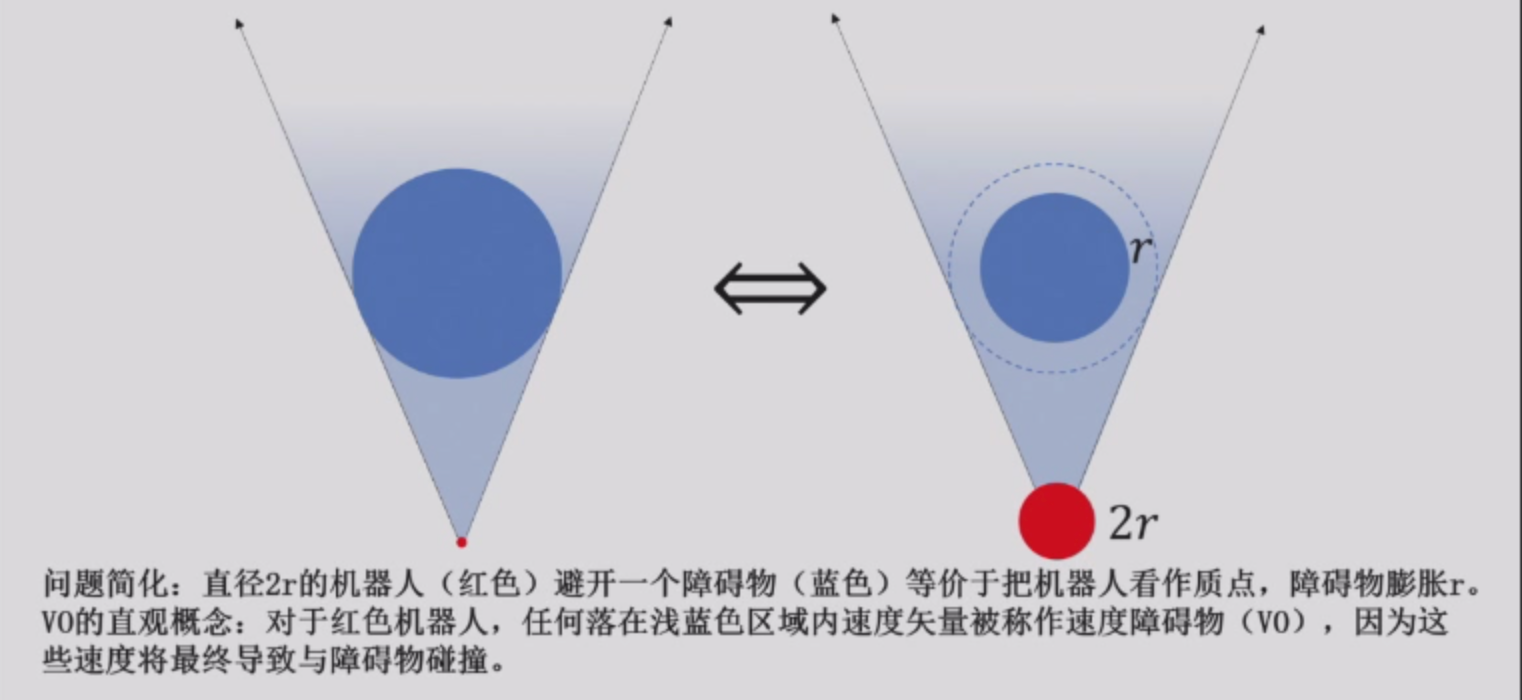
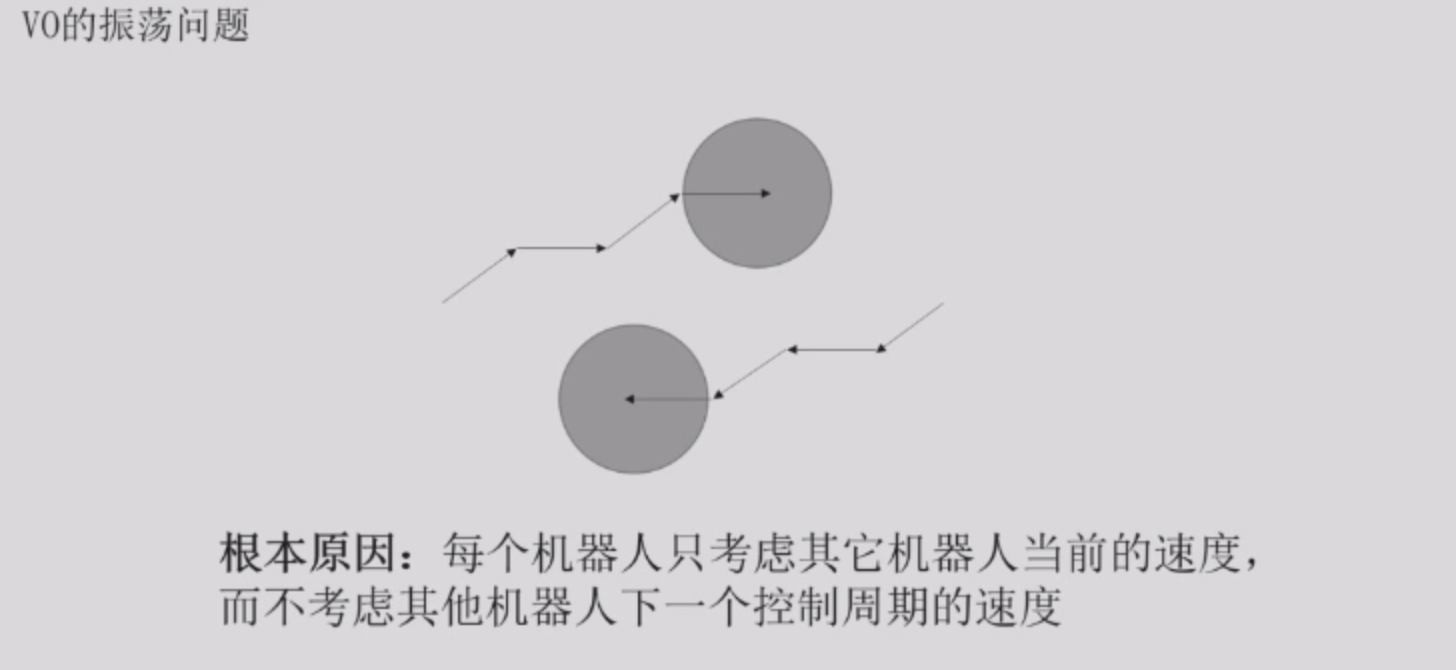
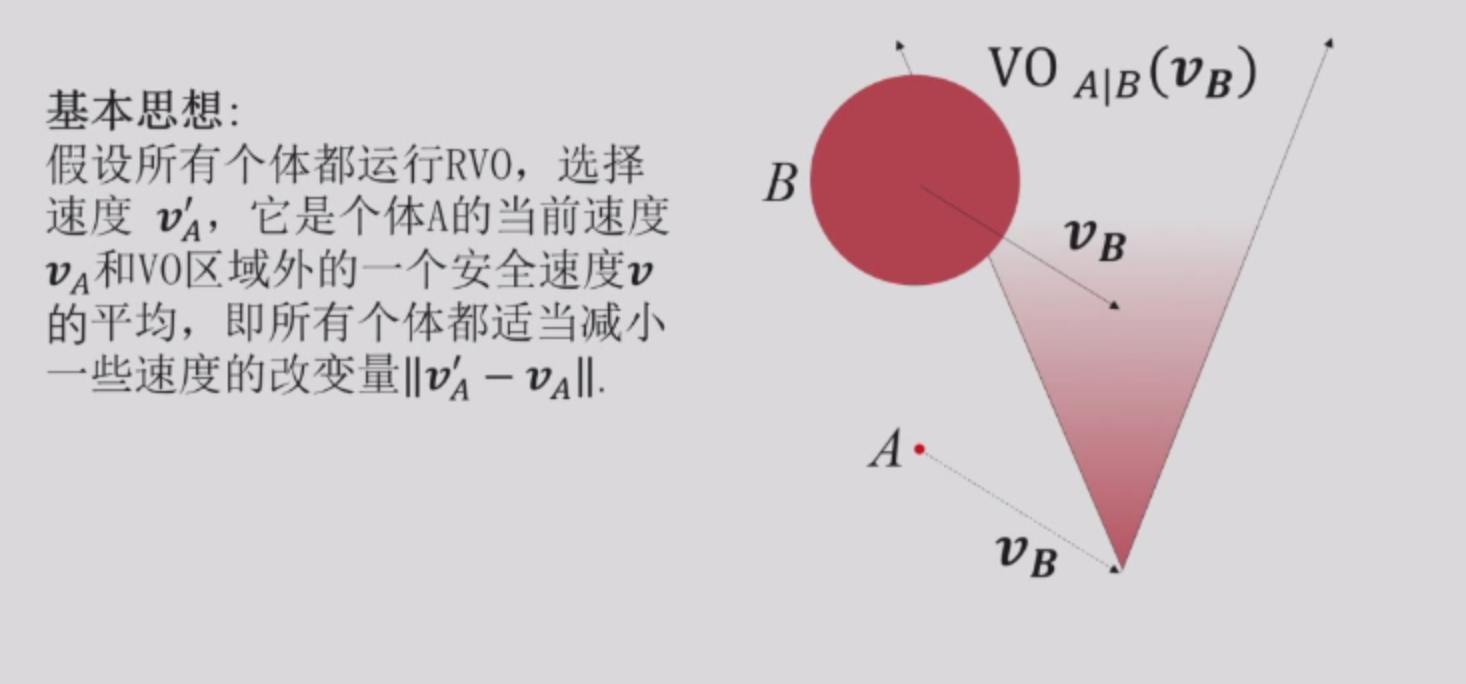
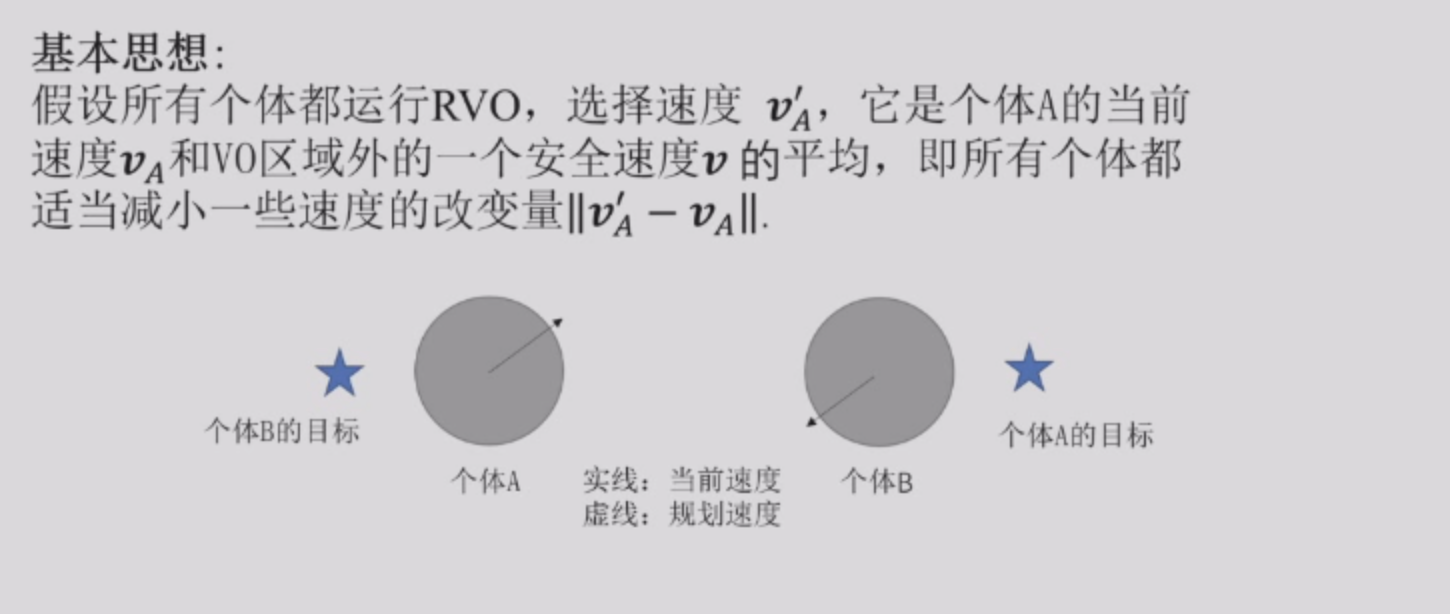
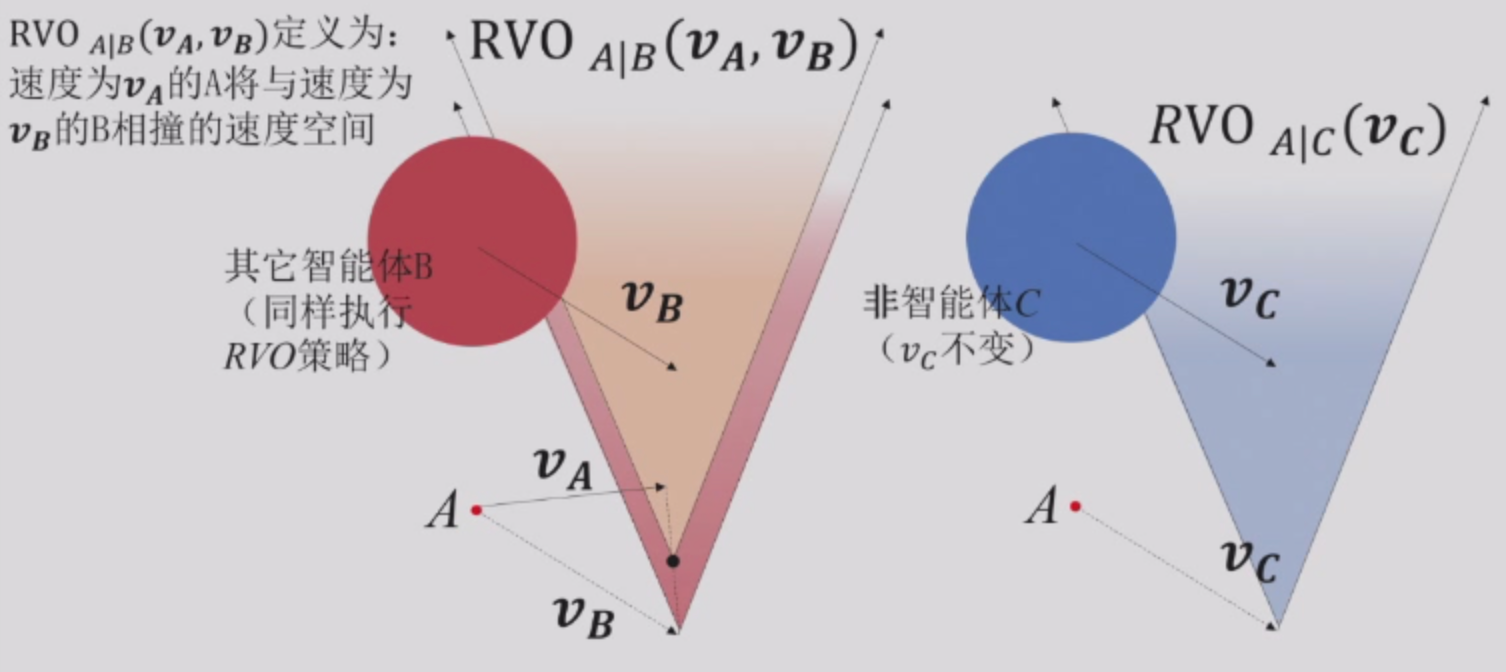
RVO¶
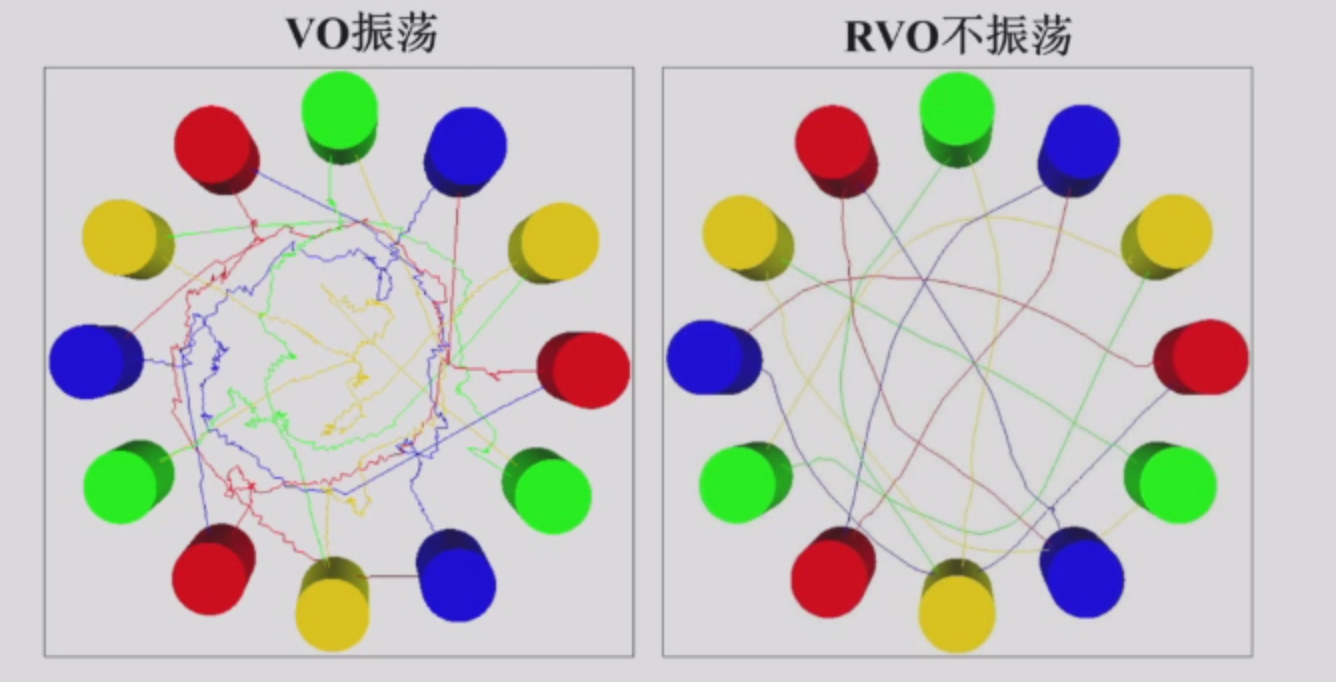
RVO则在VO的基础上进行了一些改进,解决了VO抖动的问题。为什么会发生抖动?双方为了避障,都偏移了当前速度太多,导致更新速度后,原来速度不再会发生碰撞,更倾向于原来的速度。
Reciprocal的理解是:相对于VO完全把对方当做木头,RVO假设对方在避障中也会承担一定责任,所以不用完全靠自己改变速度来走出VO,有种互相合作避障的感觉。
3. 基于生物群落模型的集群导航算法¶
基本思想:为实现像鸟群一样的一致飞行,每一个体的运动由三股力量(速度)决定:
- 短距离:与邻居、障碍物的排斥速度vrep,越靠近斥力越大;
- 中距离:运动对齐速度vfrict,越偏离权重越大;
- 长距离:远方目标的引力vflock,一定范围内维持未定;
执行速度为三类速度的矢量 vexe=vrep+vfrict+vflock.
应用难点:参数繁多且对参数灵敏
解决办法:进化算法调参
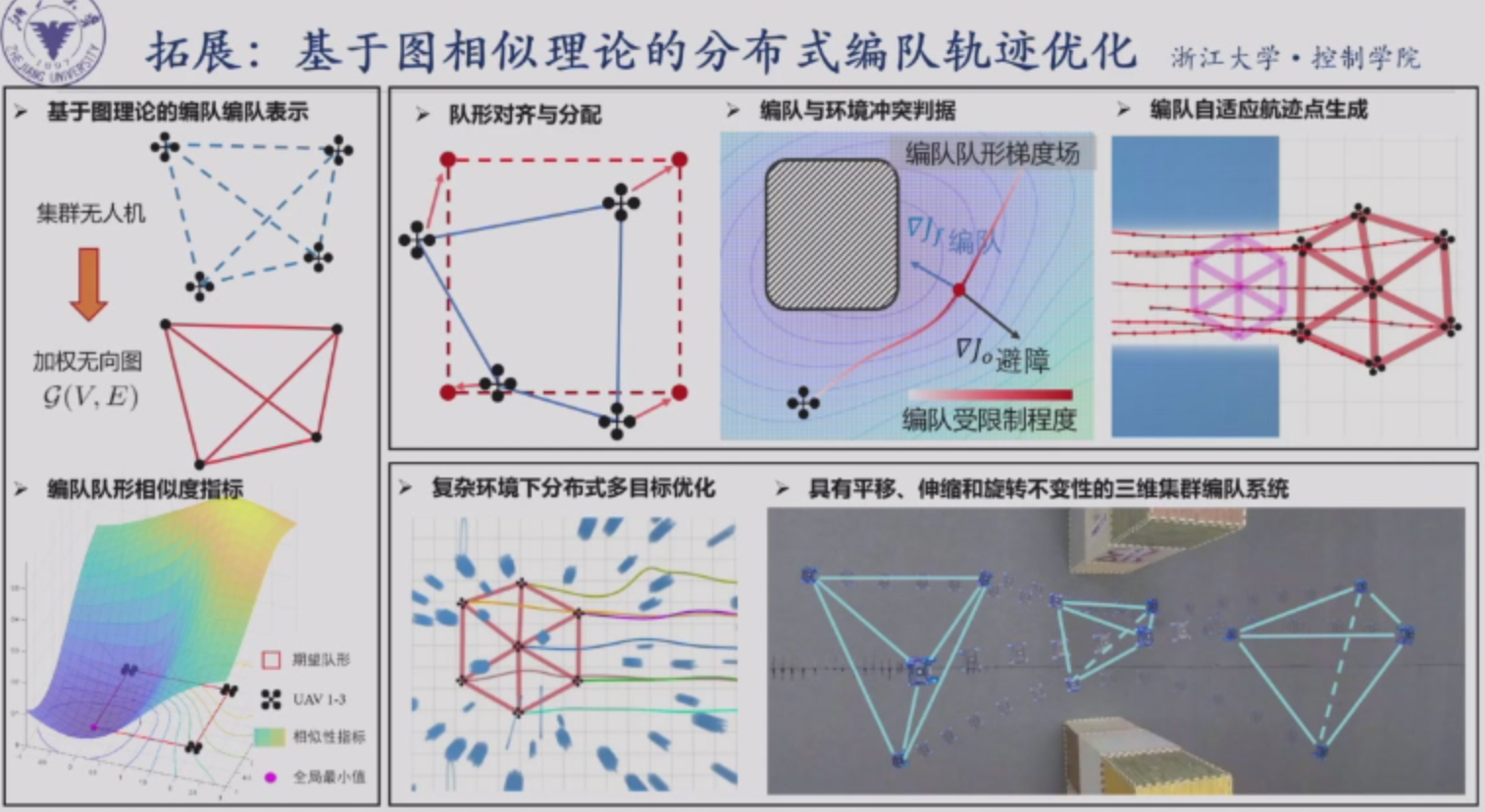
先进的集群算法¶
本文总阅读量次