第十二课 规划导论
约 248 个字 14 张图片 预计阅读时间 1 分钟
规划导论¶
- 系统软件框架
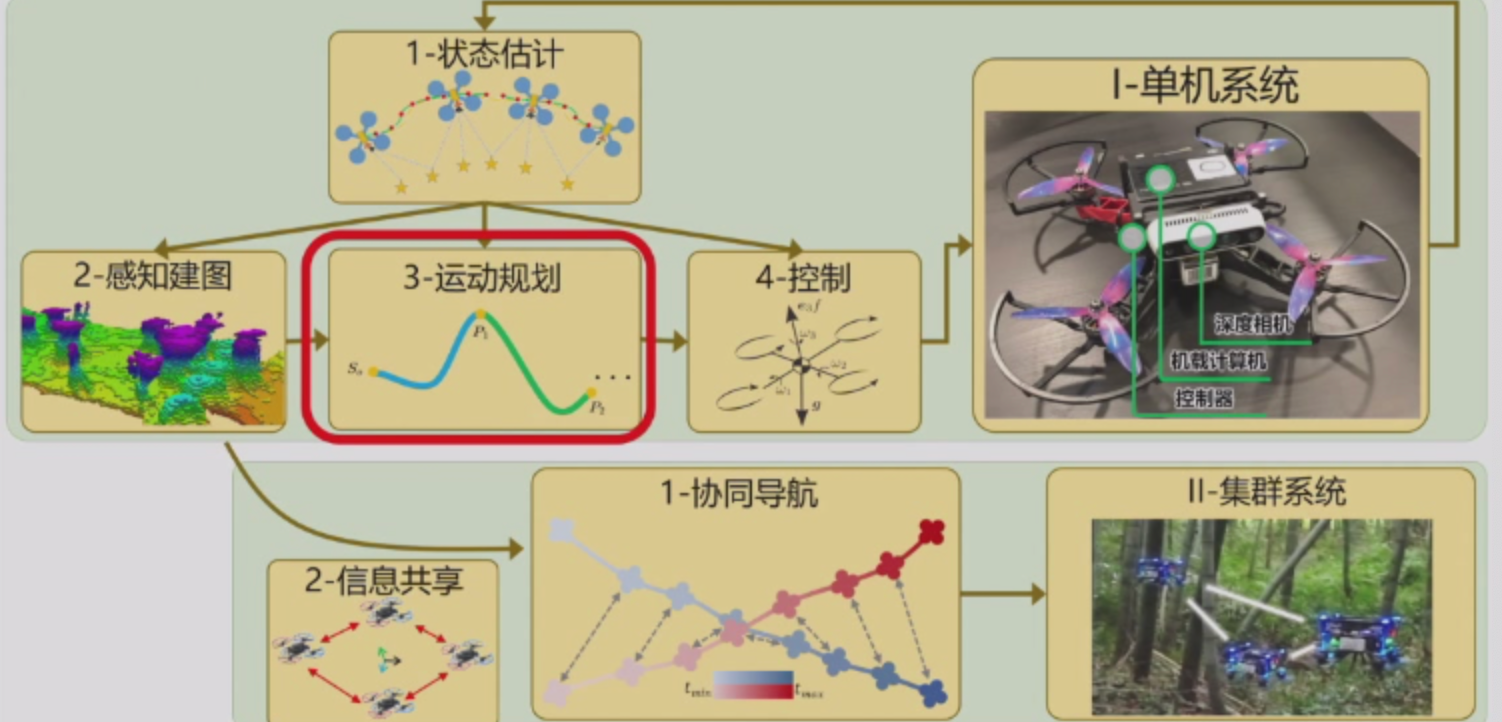
- 先基于环境进行路径搜索,之后再考虑动力学约束进行优化
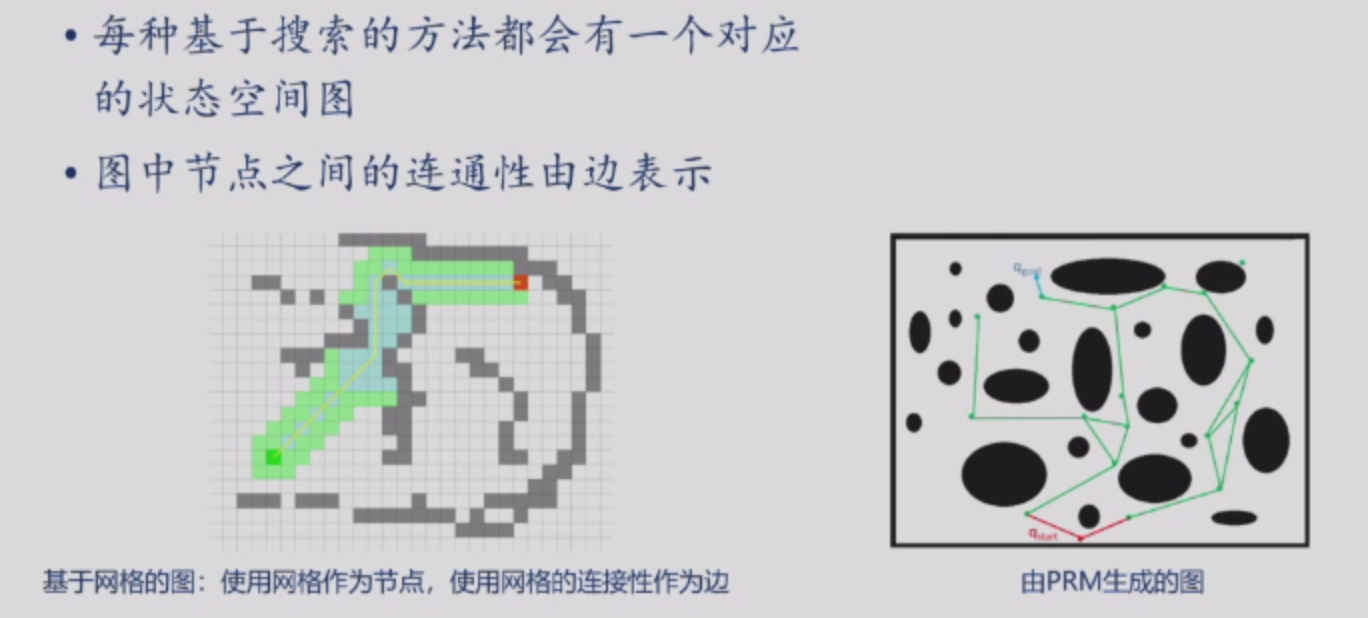
导航地图与路径规划¶
-
数据结构 + 融合方法(滤波/优化) = 地图
-
栅格地图
- 高程图(一个网格只能记录一个信息),拓展高程图(一个网格中还存着一个一维数组,可以表示不连续的高度比如桥)
- 最为稠密,有结构的,直接索引查询
-
八叉树地图
-
对于可以合并的,直接表示,对于需要精细化表示的,在进行切分
-
稀疏,有结构的,直接索引查询
-
-
点云地图
- 精度最高,无顺序,无法索引查询
-
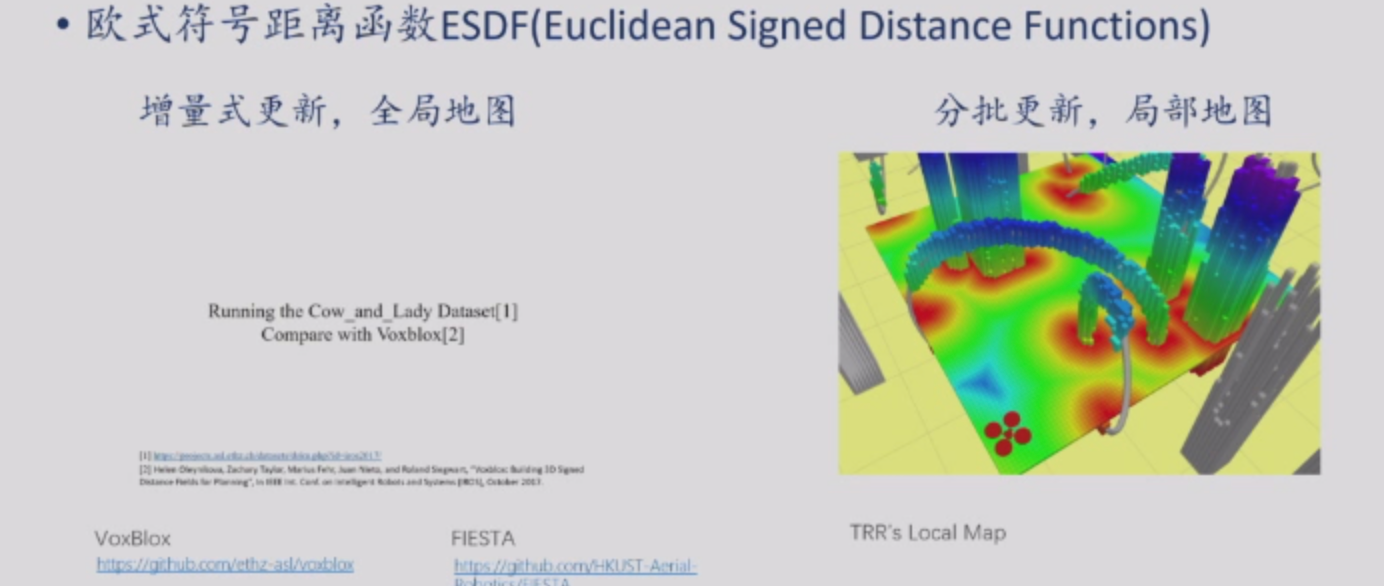
ESDF地图
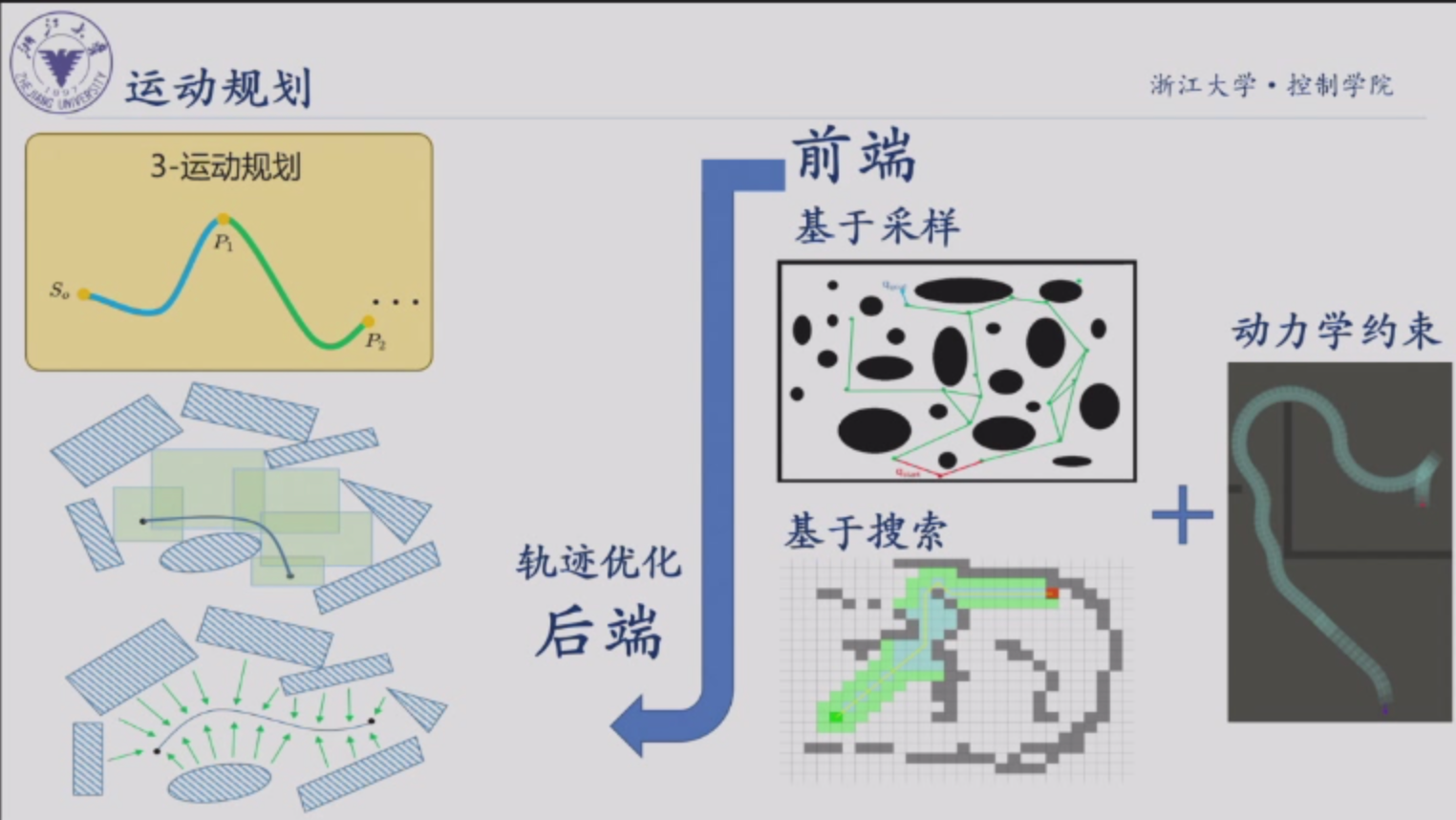
路径搜索¶
-
分类
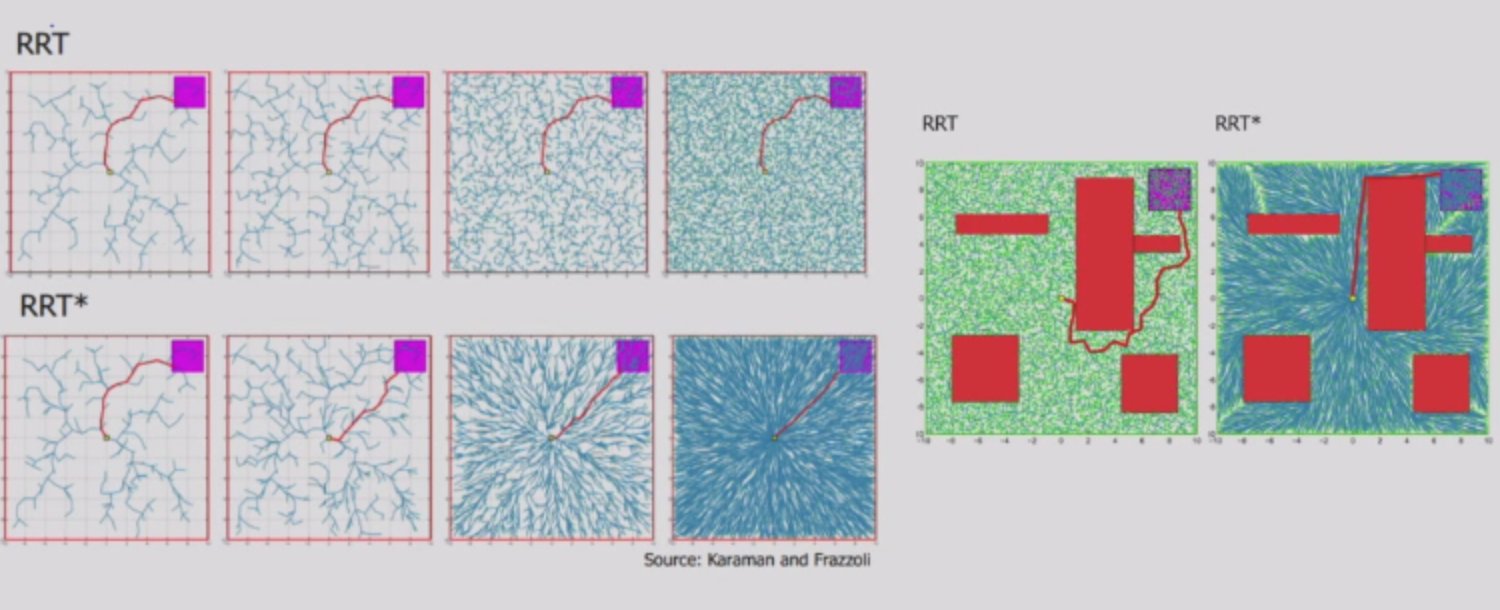
- 基于采样的算法:PRM、RRT、RRT*
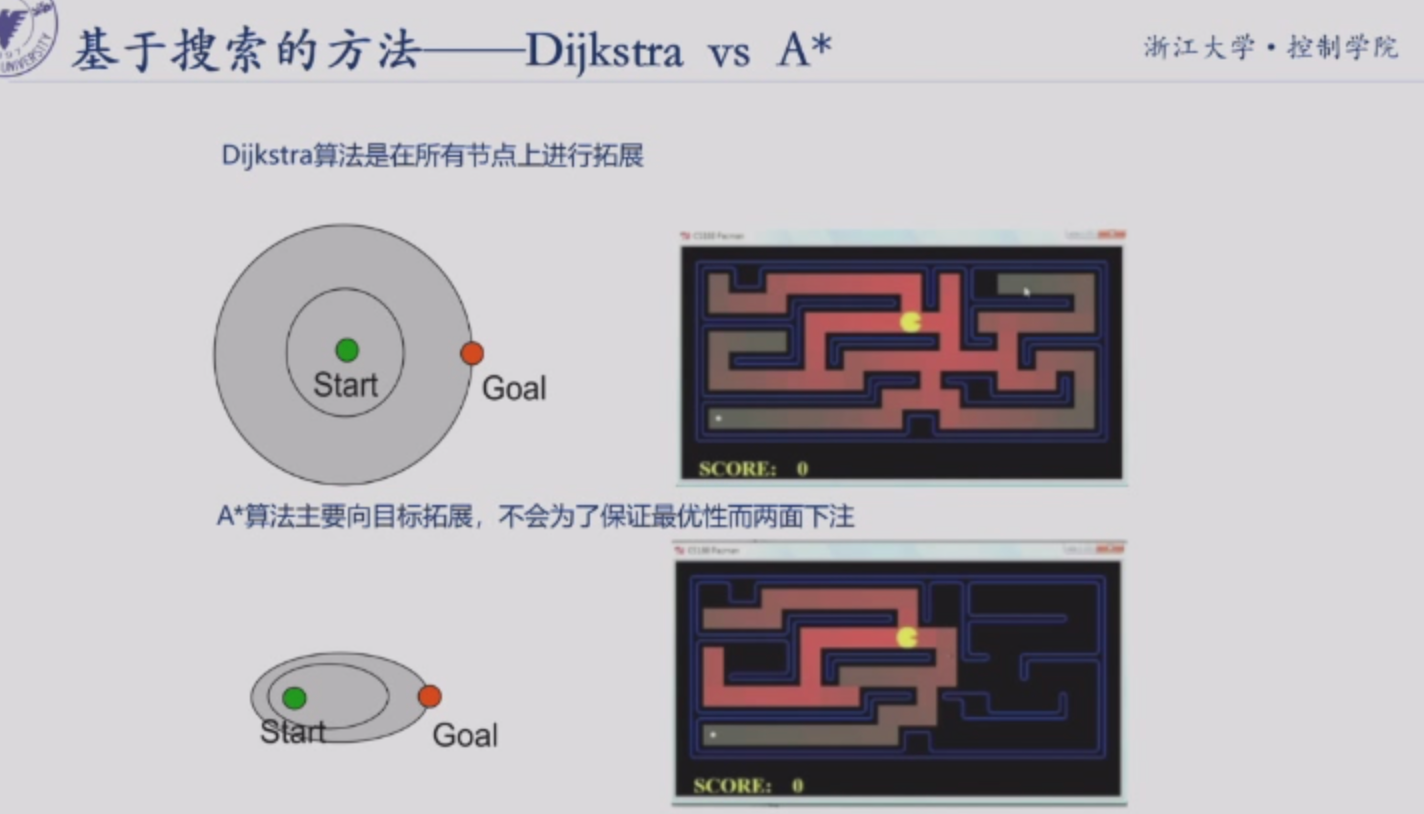
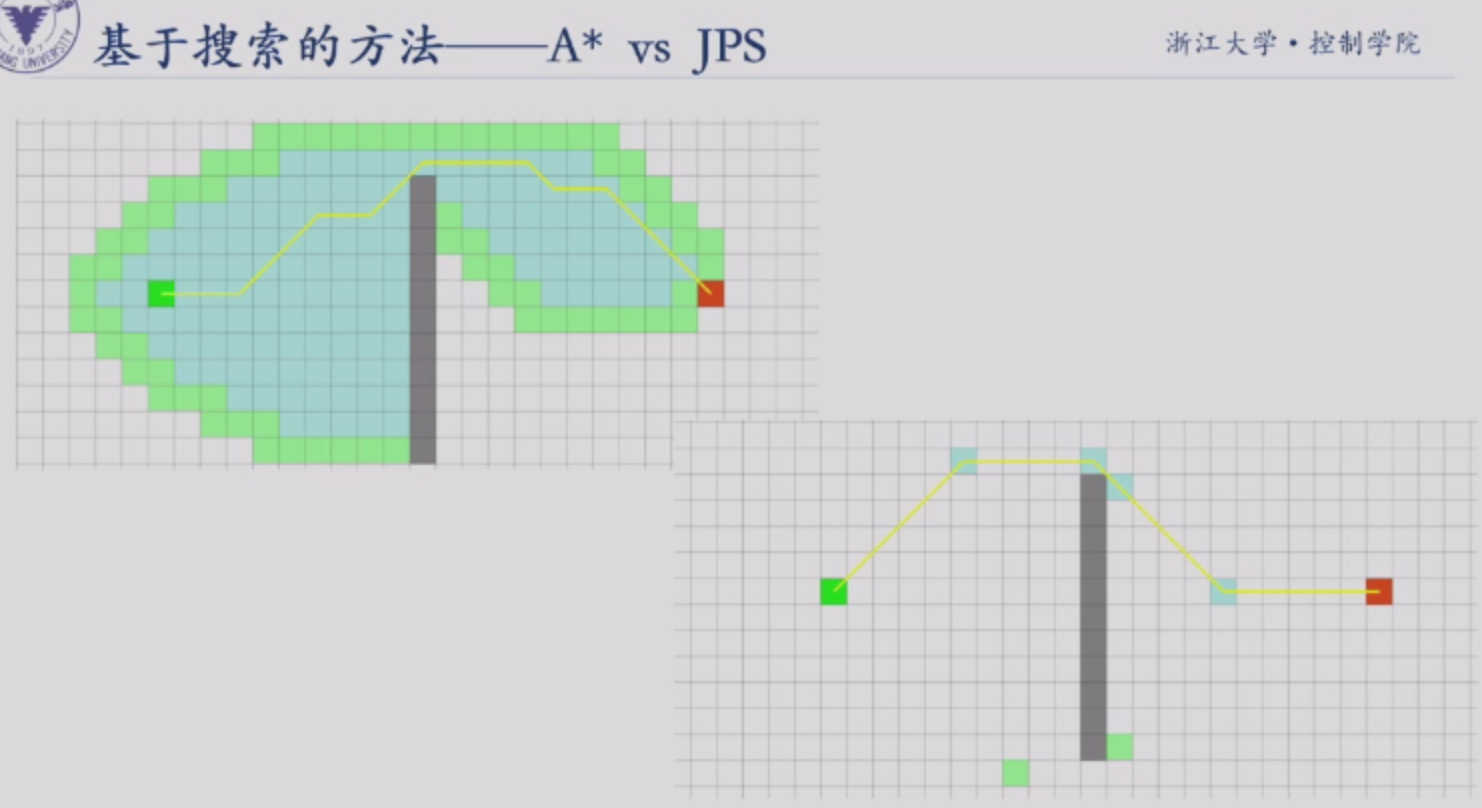
- 基于搜索的方法:DFS、BFS、Dijkstra、贪心算法、Jump Point Search
- PRM
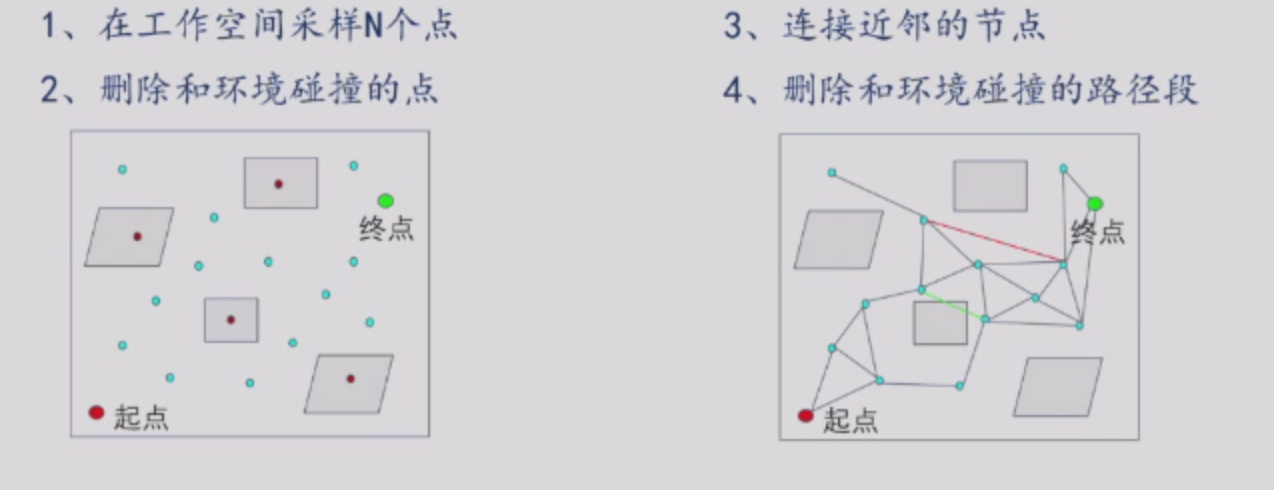
-
RRT
-
基于搜索的方法
-
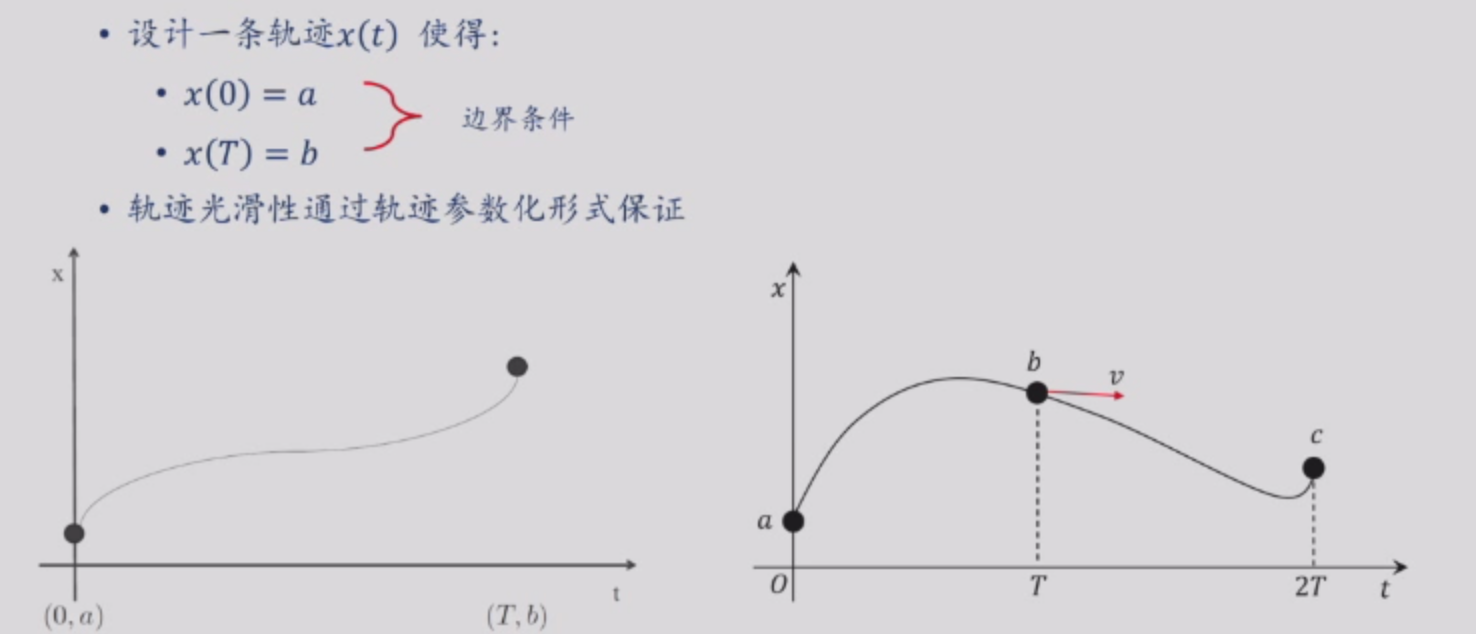
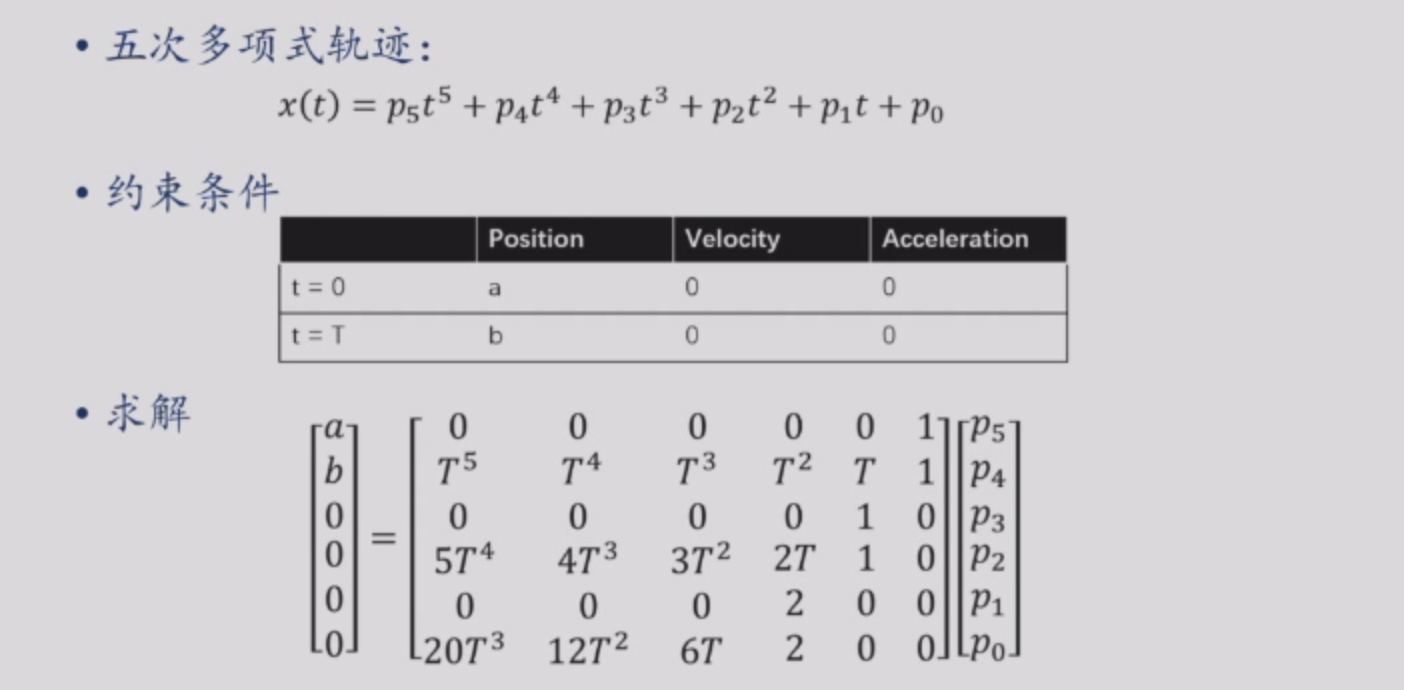
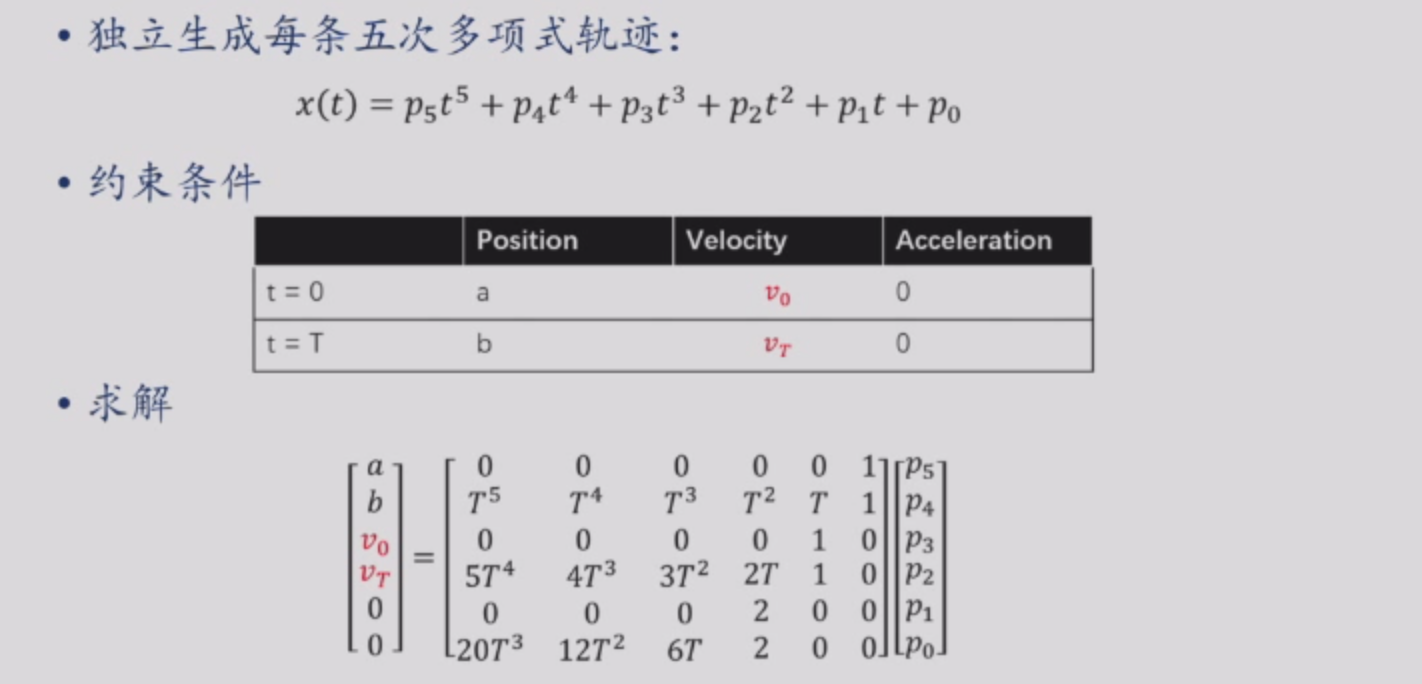
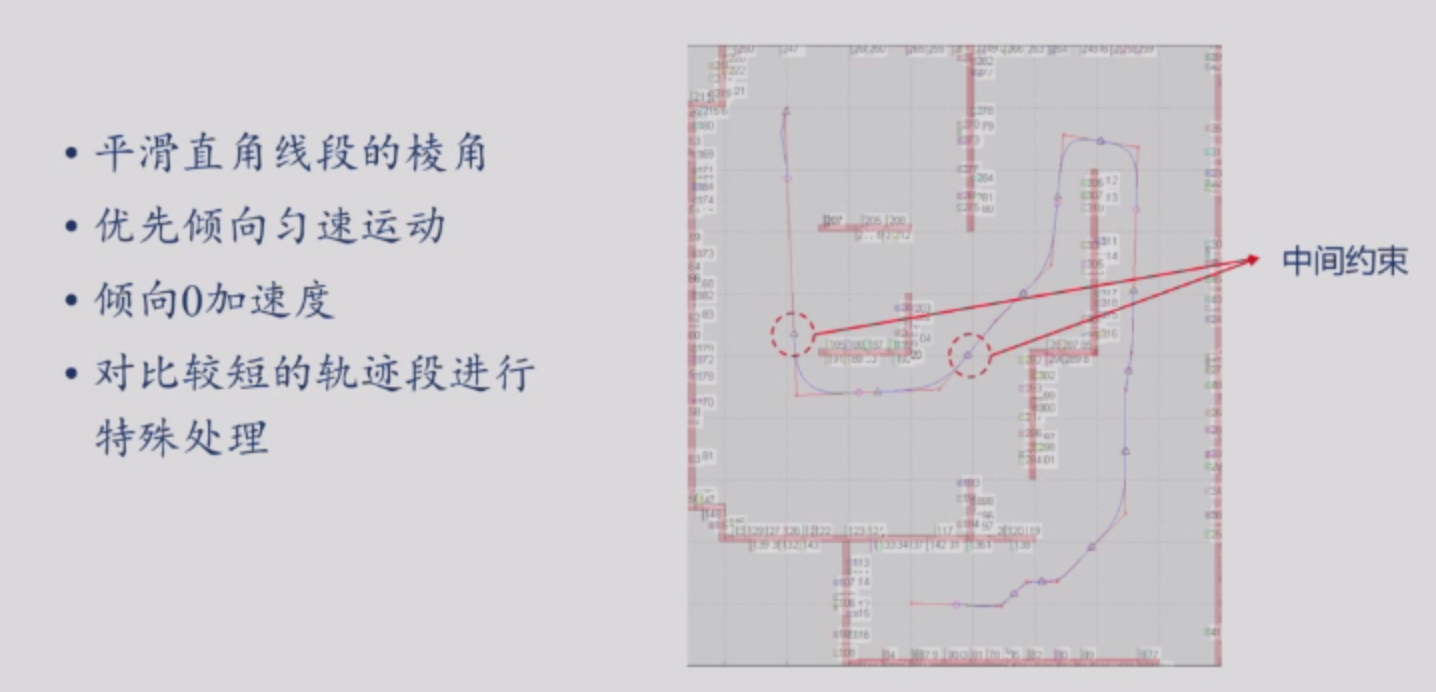
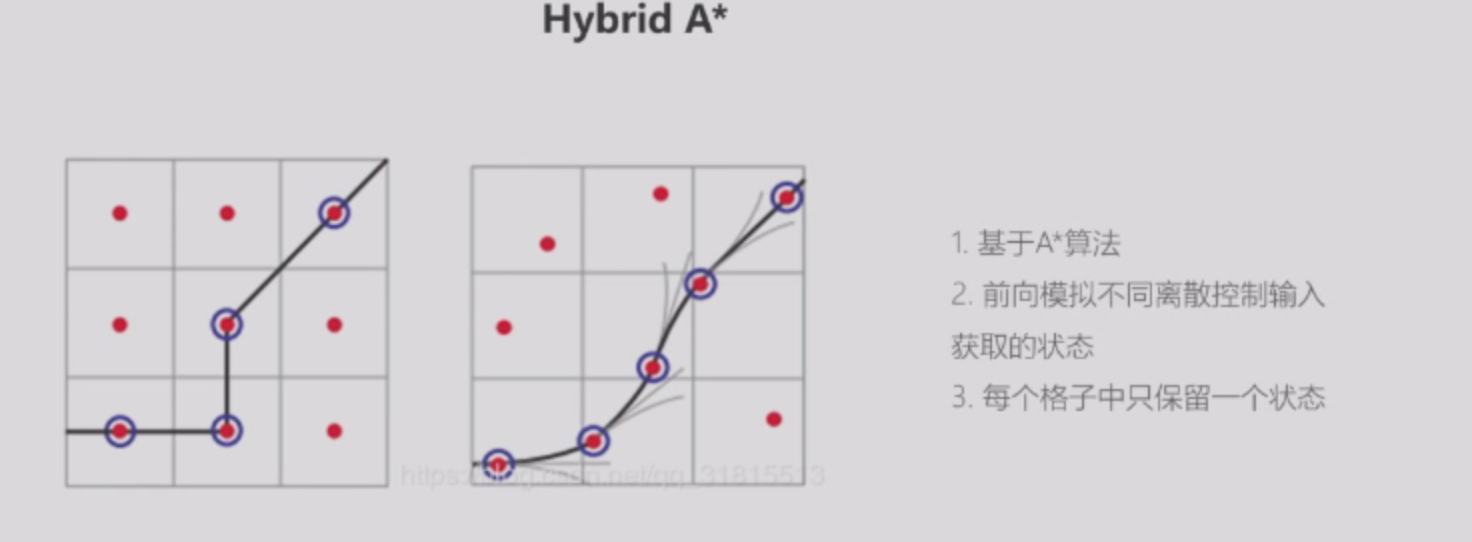
基于动力学运动规划的路径搜索
- 光滑一维轨迹
本文总阅读量次