第十课 里程估计
约 1041 个字 14 张图片 预计阅读时间 3 分钟
1. 里程估计¶
- 定义:根据传感器感知信息推导机器人位姿(位置和角度)变化;
- 用途:
- 航位推算:基于已知位置,利用里程估计,推算现在的位置;
- 里程估计方法:
- 电机码盘可以计算电机转了多少圈,从而计算速度和里程;
- 电机码盘和IMU都有比较大累积误差,所以还要对里程估计进行修正;
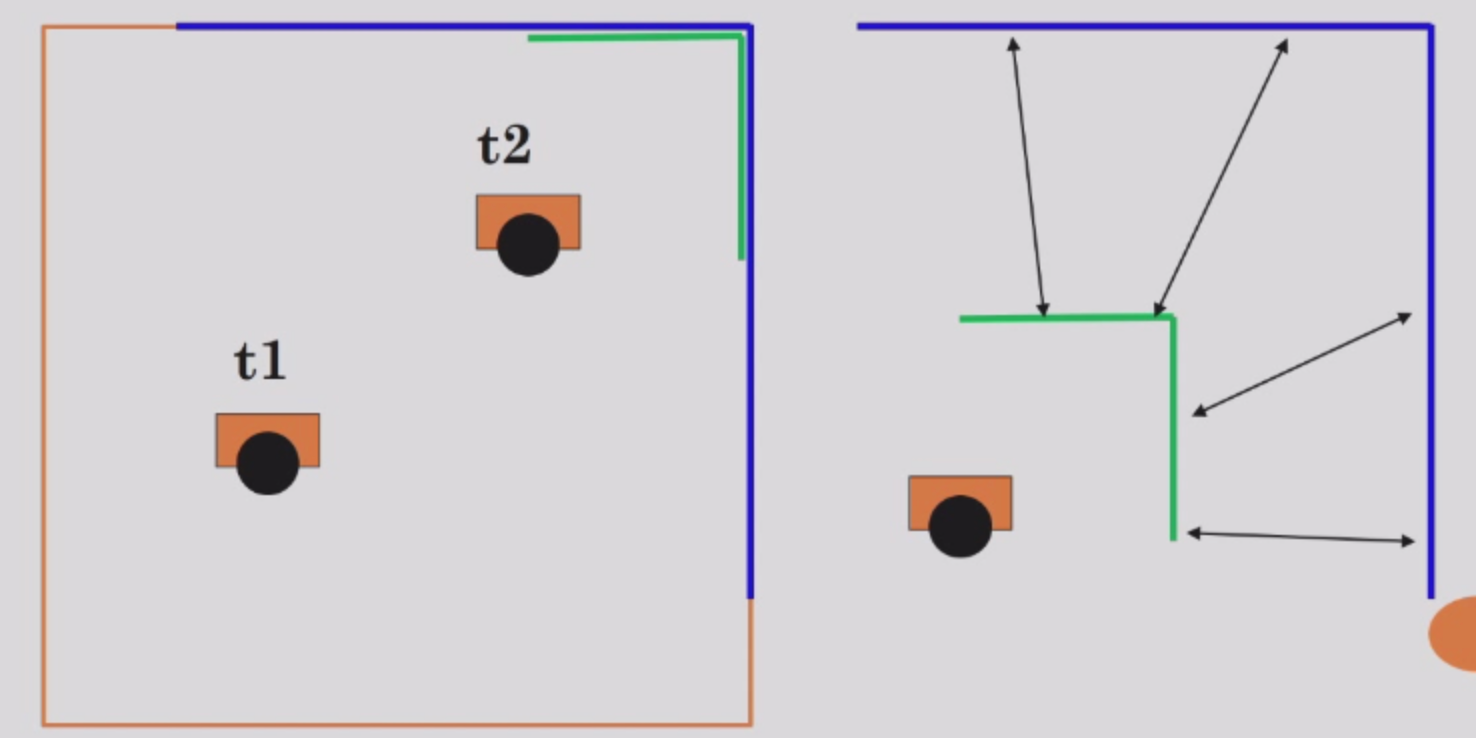
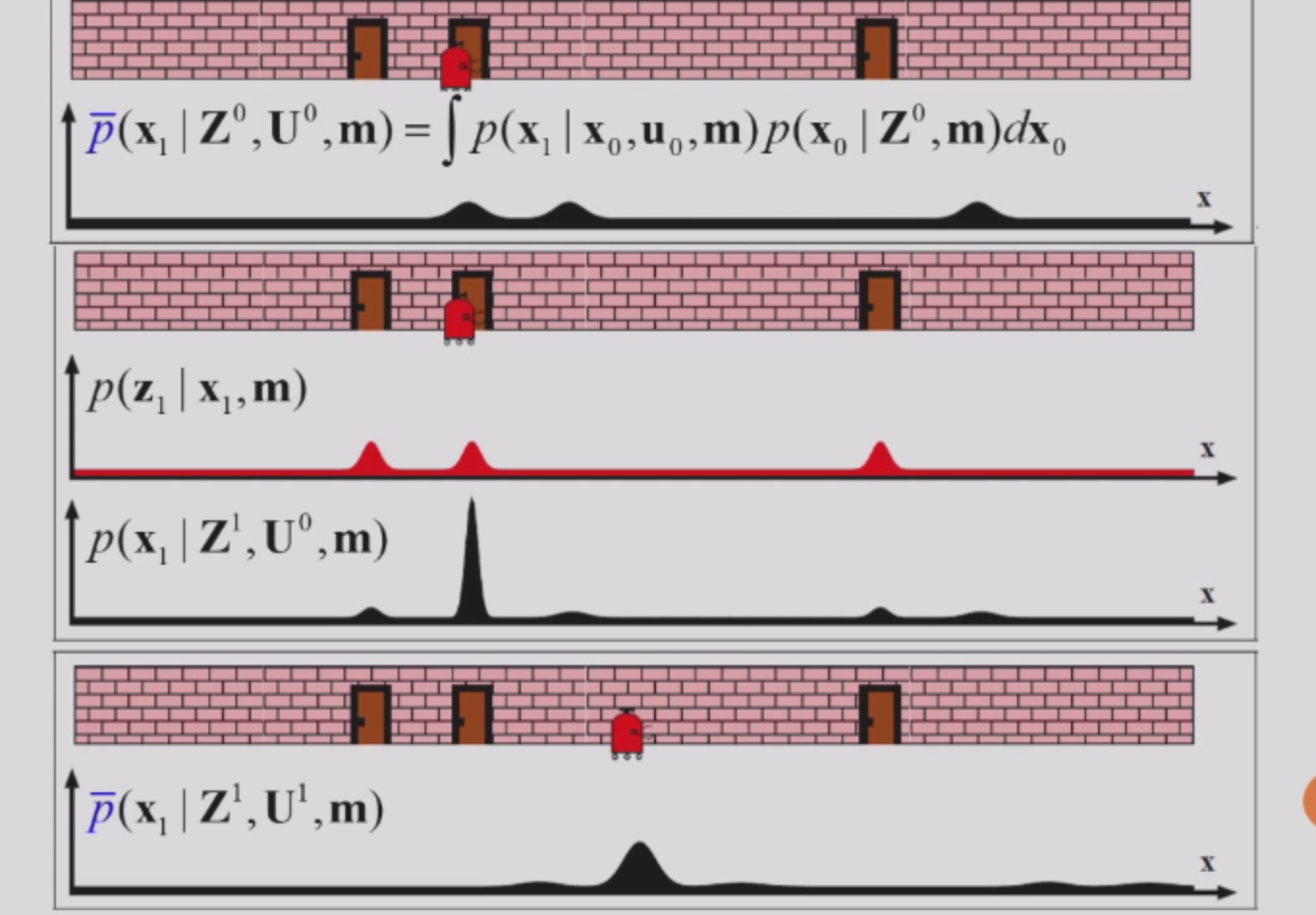
- 比如走向一头门,门越来越大,可以根据这种静态环境的变化,反算速度和里程;
- 电机码盘可以计算电机转了多少圈,从而计算速度和里程;
1.1 基于电机码盘的轮式移动机器人里程估计¶
- 1)根据电机码盘获得轮子转速
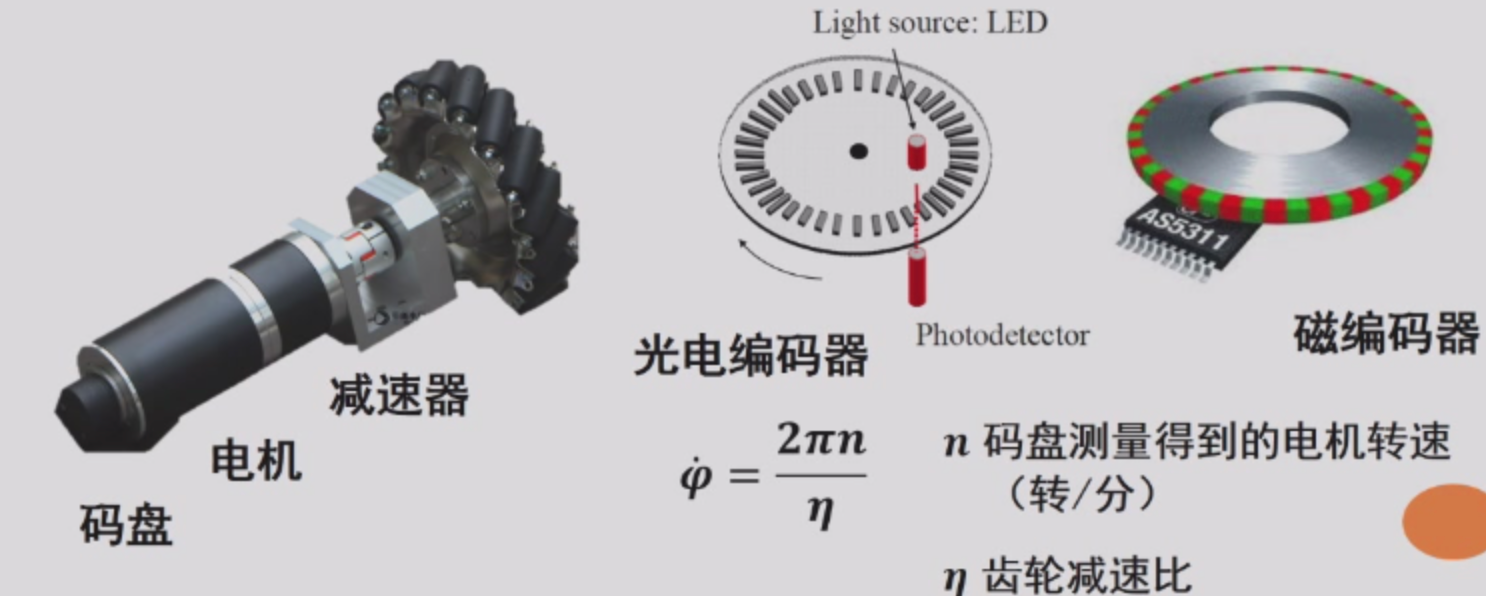
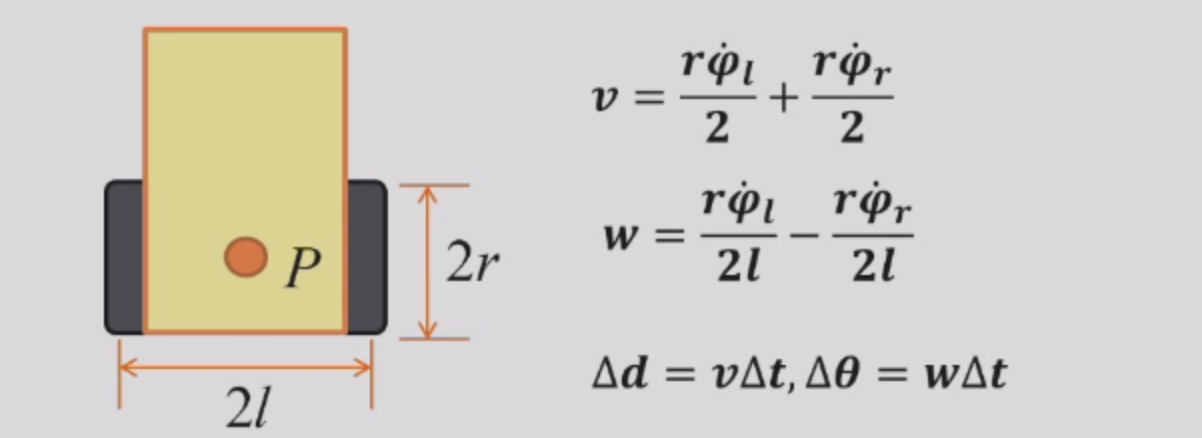
- 2)结合运动学模型计算参考点速度(利用多个轮子的速度计算出比如质心的速度)
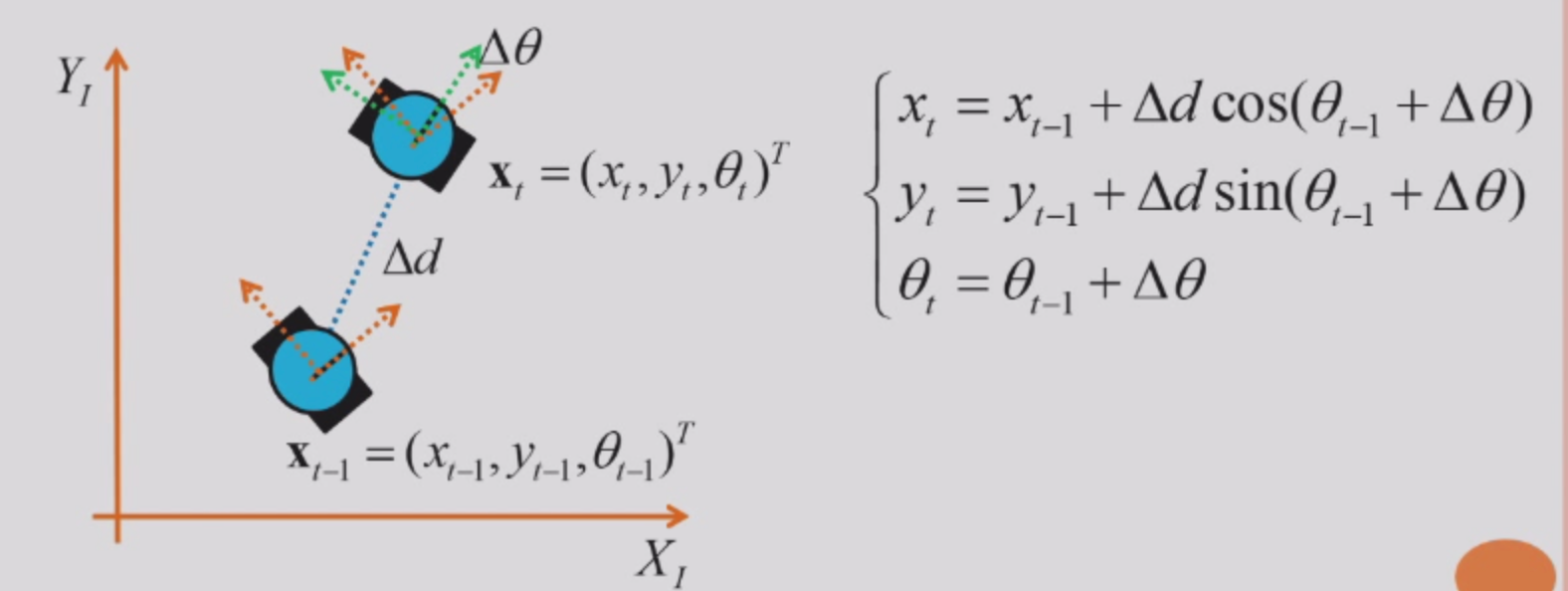
- 3)假设短时间片内为匀速运动,计算位姿变化
-
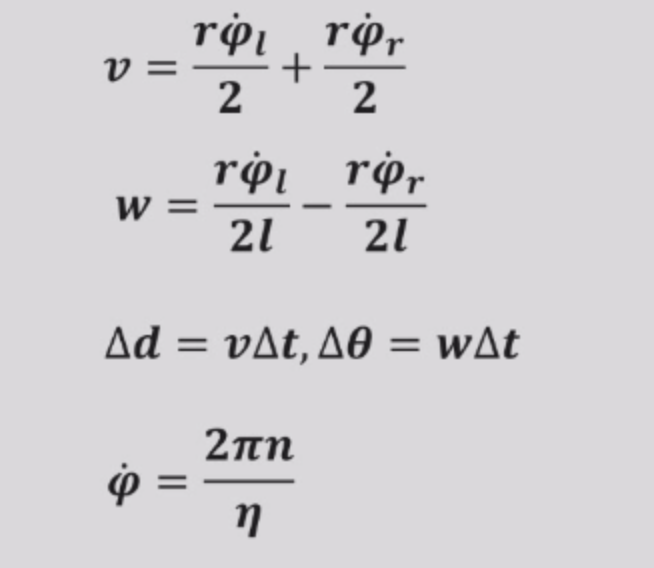
运动学模型方程样例:
-
基于位姿变化的航位推算
-
轮式里程估计误差
- 系统误差:轮半径误差、轮子安装精度误差(不平行,两边距离不相等)、编码器精度误差、采样精度误差、齿轮减速比精度;
- 偶然误差:地面不平(轮子动了实际上没动)、轮子打滑(轮子不动但实际上动了)
- 但是,虽然里程估计误差会积累,里程估计对于每个
Delta t,误差是有上界的,所以相对误差是挺小的;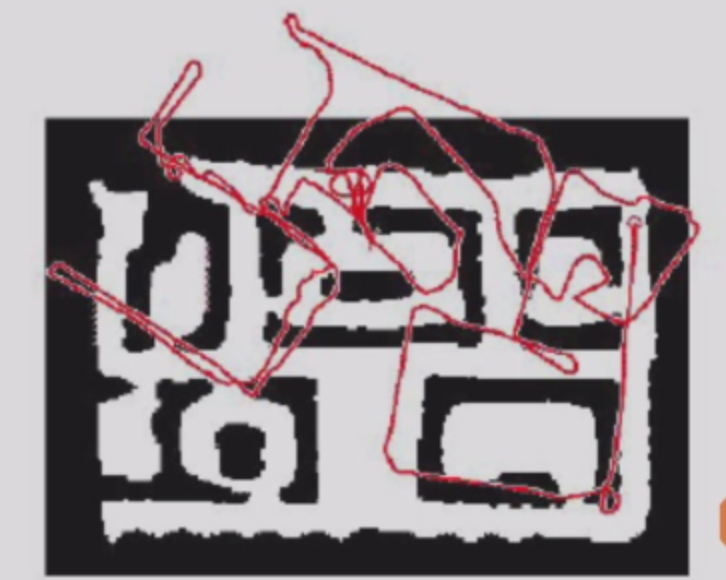
- 系统误差:轮半径误差、轮子安装精度误差(不平行,两边距离不相等)、编码器精度误差、采样精度误差、齿轮减速比精度;
-
基于惯性单元的里程估计
- 惯性单元IMU(Inertial Measurement Unit)
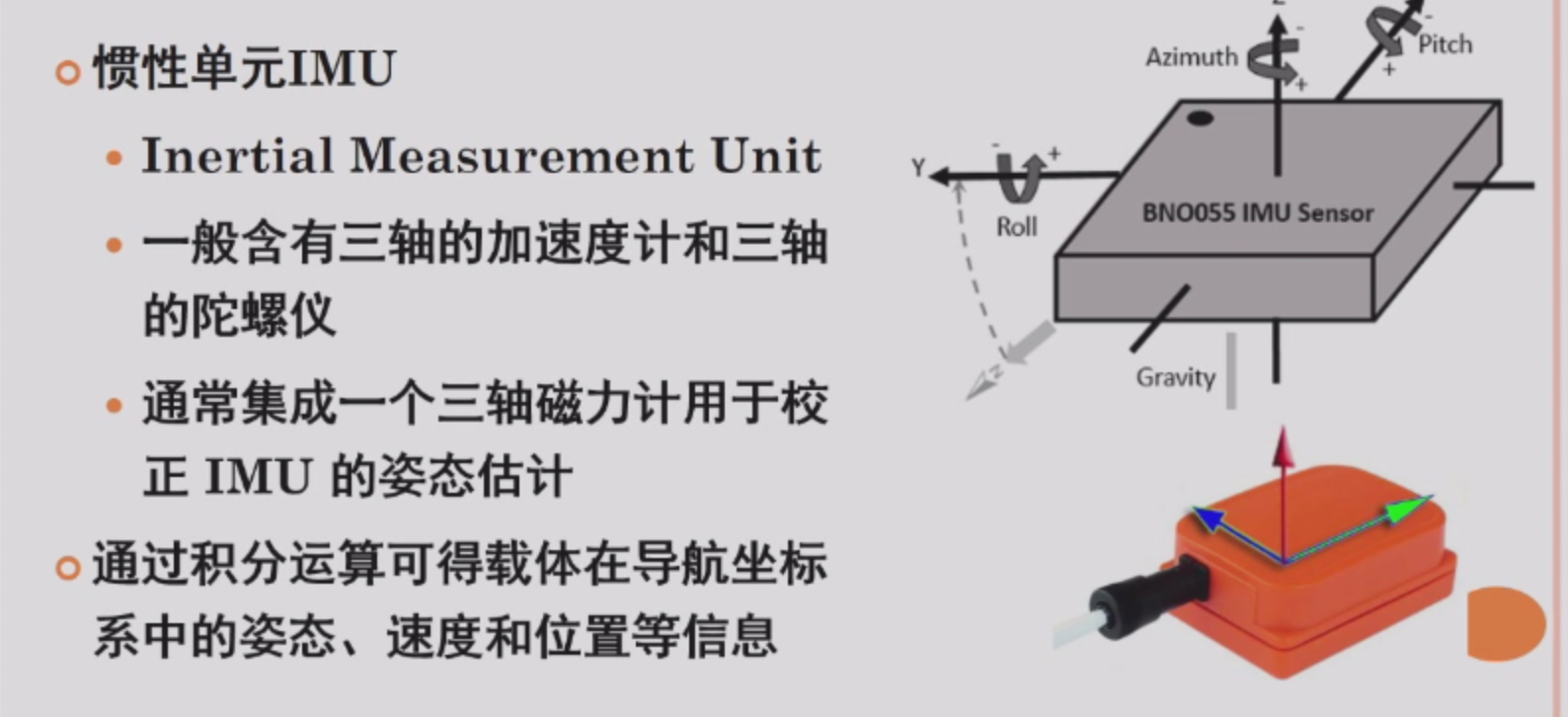
- 优点:全天候、采样频率高、短时精度较好;
- 缺点:积分是误差的根源,长距离长时间工作得不精准,需要其他传感器进行组合导航;
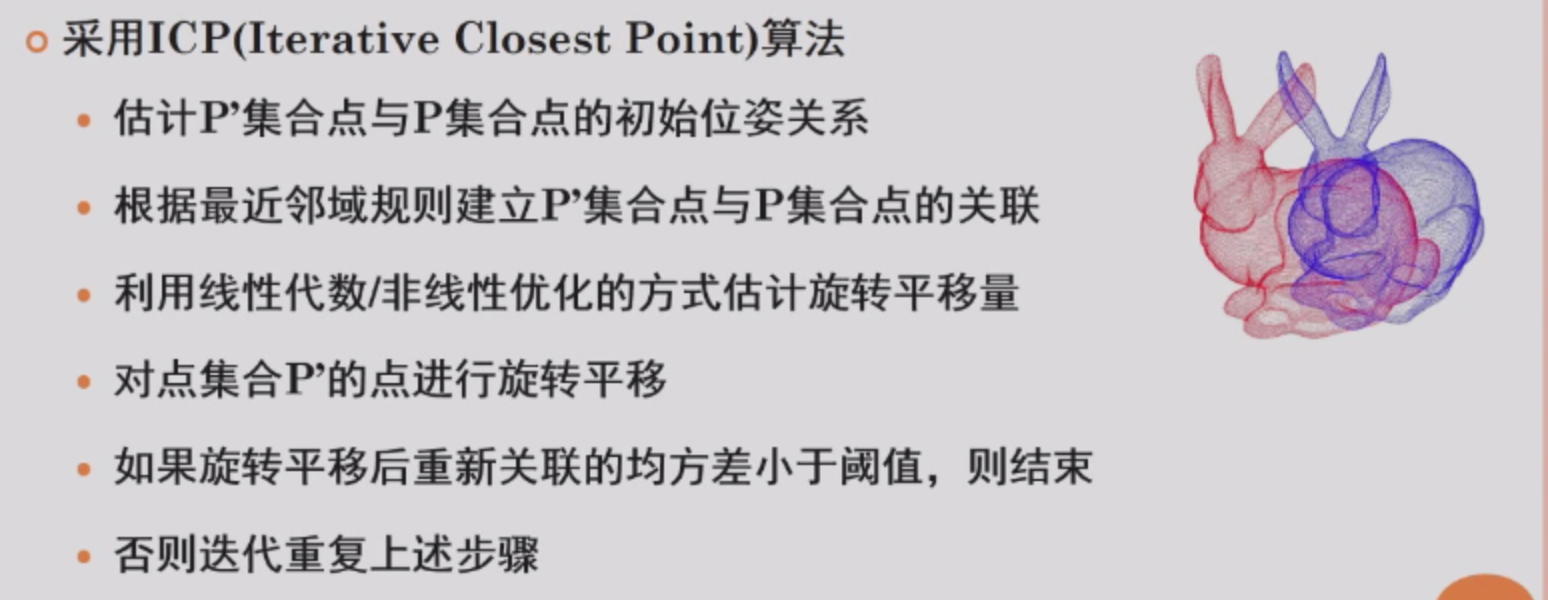
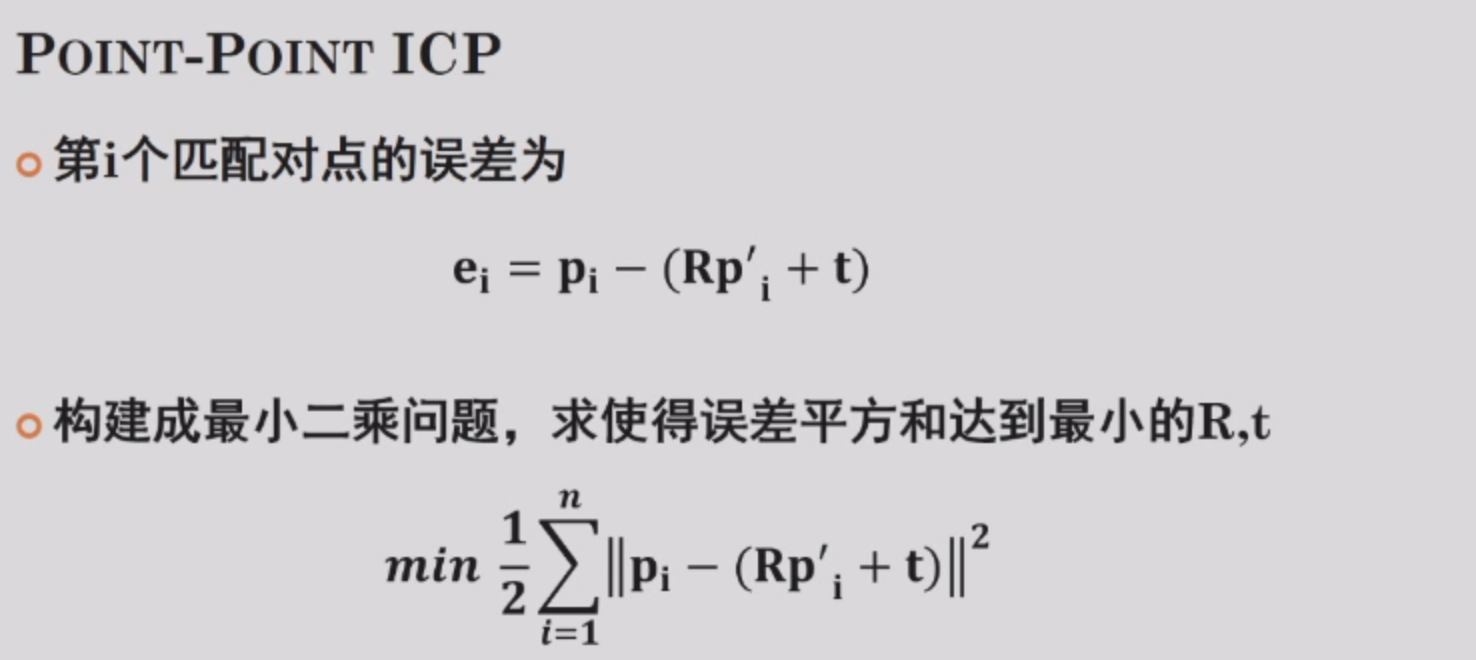
1.2 激光里程计¶
- 总是会看不到最开始的参考点,这样的话就要多次参考,又会有累积误差,所以距离越远误差越大
2. 定位¶
- 确定机器人在世界(全局)坐标系中的位置/位姿

2.1 基于外部设备感知的定位¶
- 例子:GPS、全局视觉观测定位;
- 当只见到一颗卫星的时候,只能知道在一个球面上,只有同时见到三颗卫星,才能确定位置;
- 全球定位系统存在问题:
- 基于直线距离测量,如果有反射;如果有错,那三个球就不会重合于一个点,所以为了克服多路径的算法,需要同时有更多的卫星来排除测量错误的卫星的数据;
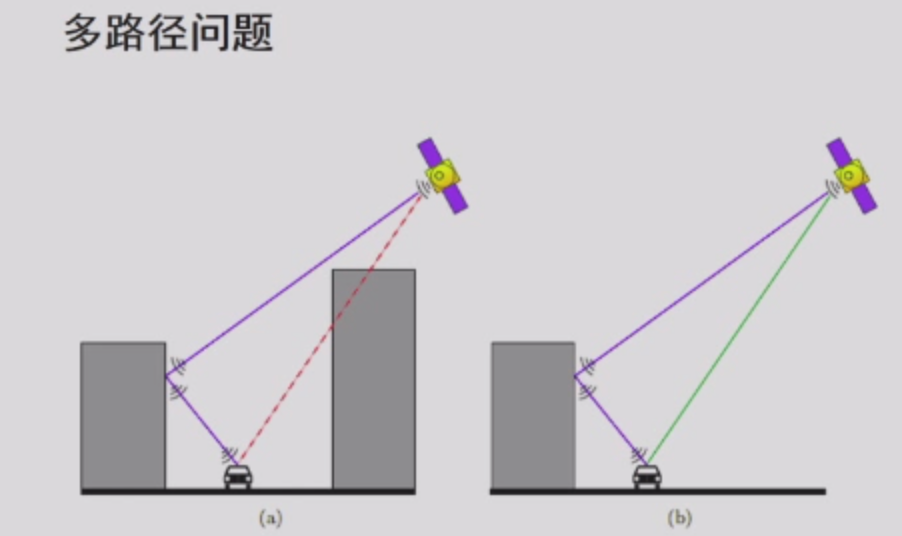
- 如果在室内,那么还会有遮挡问题,无法直接进行信号的接收;
- 基于直线距离测量,如果有反射;如果有错,那三个球就不会重合于一个点,所以为了克服多路径的算法,需要同时有更多的卫星来排除测量错误的卫星的数据;
- 全局视觉观测定位:
- 搭建一套外部视觉系统,识别机器人,确定其位置;
- 如果需要更大的视野,则架设多个相机,非常类似于GPS测量定位;
- 全局视觉观测定位应用约束:
- 1)摄像头有视野范围约束,当环境较大时需要多个摄像头;
- 2)机器人上也需要有一定的标识方便图像识别定位;
2.2 (不知道是什么标题¶
-
基于环境人工标识的定位(把编码放到环境当中)
- 在环境中部署特殊标签,减低成本,确保可靠性把相机装到自己身上(比如淘宝仓库的地面二维码、安装在某一高度的激光发射板);
-
基于环境自然标识的定位
- 比如高速公路上看路标;
3. 总结¶
-
控制感知信息融合的自定位:
- 用二维码观测作为感知数据有观测时利用二维码修正定位,没有观测时利用里程估计;
- 用交通标志观测作为感知数据有观测时利用标志位置修正定位,没有观测时利用里程估计;
-
定位问题可以定义为最优估计问题;
-
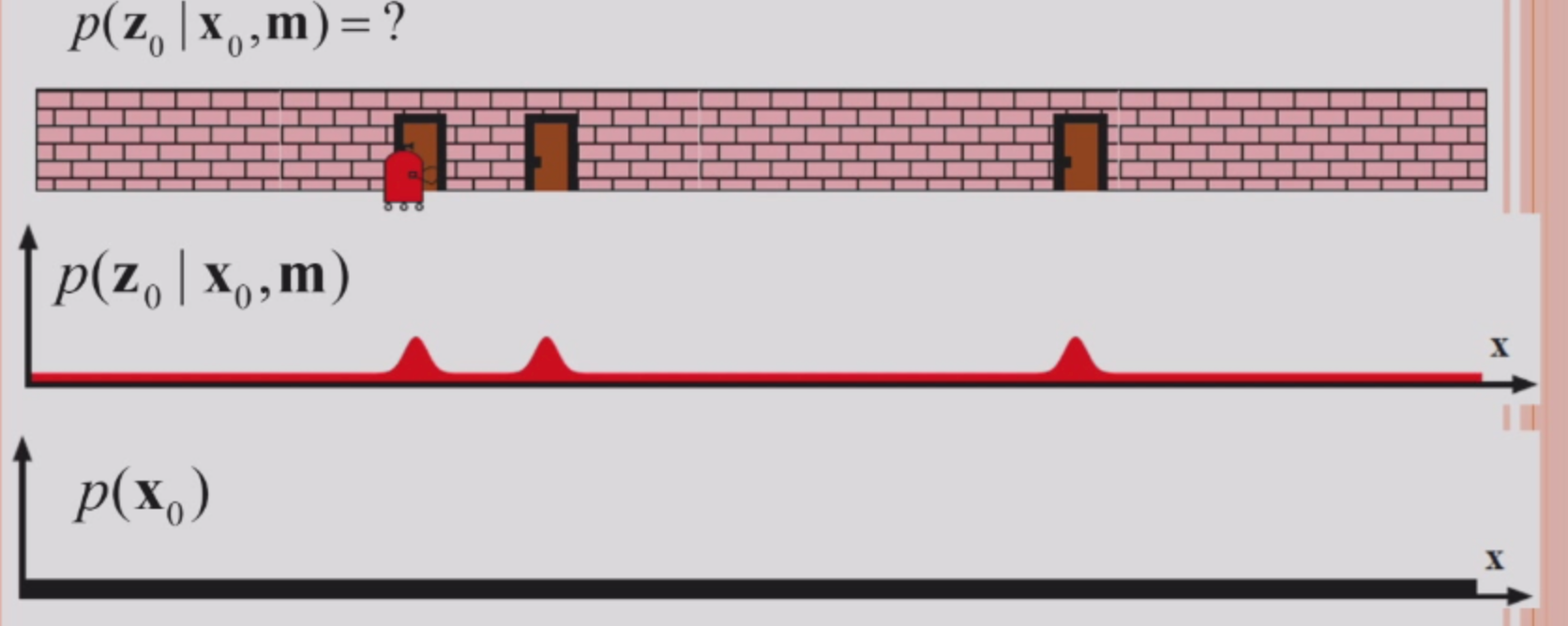
最优估计的一个体现是估计的方差很小;
-
(三头门无法区分,只能知道在门前),原理是:正确的东西会叠在一块,而错误的会变小;
本文总阅读量次