第四课 机器人传感器
约 1082 个字 44 张图片 预计阅读时间 4 分钟
考试¶
重要的是传感器的原理,比如光电码盘的原理? 还有可能列举机器人里面的内部传感器?
一个例子¶
1. 定义(重要)¶
用于定量感知环境特定物质属性的电子、机械、化学设备,并能够把各种物理量和化学量等精确地变换为电信号,再经由电子电路或计算机进行分析与处理,从而对这些量进行检测。
Text Only
自然界中的物理量或化学量
++++++++++++++++++++
电信号
++++++++++++++++++++
信息分析与处理
(电子电路或计算机)
2. 分类-内部传感器(重要)¶
- 测量机器人自身状态;
- 常用语底层运动控制;
| 传感器 | 检测功能 |
|---|---|
| 电位器、旋转变压器、码盘 | 角度、位移 |
| 测速发电机、码盘 | 速度、角速度 |
| 加速度传感器 | 加速度 |
| 倾斜仪 | 倾斜角度 |
| 陀螺仪 | 方位角 |
| 力/力矩传感器 | 力/力矩 |
3. 分类-内部传感器(重要)¶
- 测量机器人所处环境;
- 部分用于底层运动控制,部分用于上层运动规划;
| 传感器 | 感知内容 |
|---|---|
| 视觉 | 环境图像 |
| 触觉、滑动觉 | 物体存在检测、尺寸、形状、材质、硬度、光滑 |
| 接近觉(蝙蝠) | 障碍检测、距离(人其实不能) |
| 热觉 | 温度 |
| 嗅觉 | 气味 |
| 听觉 | 声音 |
| 味觉 | 味道 |
| 力觉 | 力和力矩 |
一个例子¶
4. 传感器的特性¶
静态特性¶
指检测系统的输入为不随输出时间变化的恒定信号时,系统的输出与输入之间的关系;
- 基本要求:输出相对于输入保持一定的对应关系;
- 主要静态特性:
- 灵敏度:对输入信号变化的响应敏感度;
- 信噪比(S/N):传感器输出信号中信号分量与噪声分量的平方平均值之比;
- 线性:输入与输出量之间为线性比例关系;
- 稳定性:输入量恒定,输出量向一个方向偏移(温漂/零漂);
- 精度:
- 准确度:测量值对真值的偏离程度;
- 精密度:测量相同对象,每次测量会得到不同测量值;
动态特性¶
指检测系统的输入为随时间变化的信号时,系统的输出与输入之间的关系;
- 也称为响应特性;
- 要检测的输入信号是随时间而变化的,则传感器应能跟踪输入信号的变化;
- 瞬态响应特性;
- 频率响应特性;
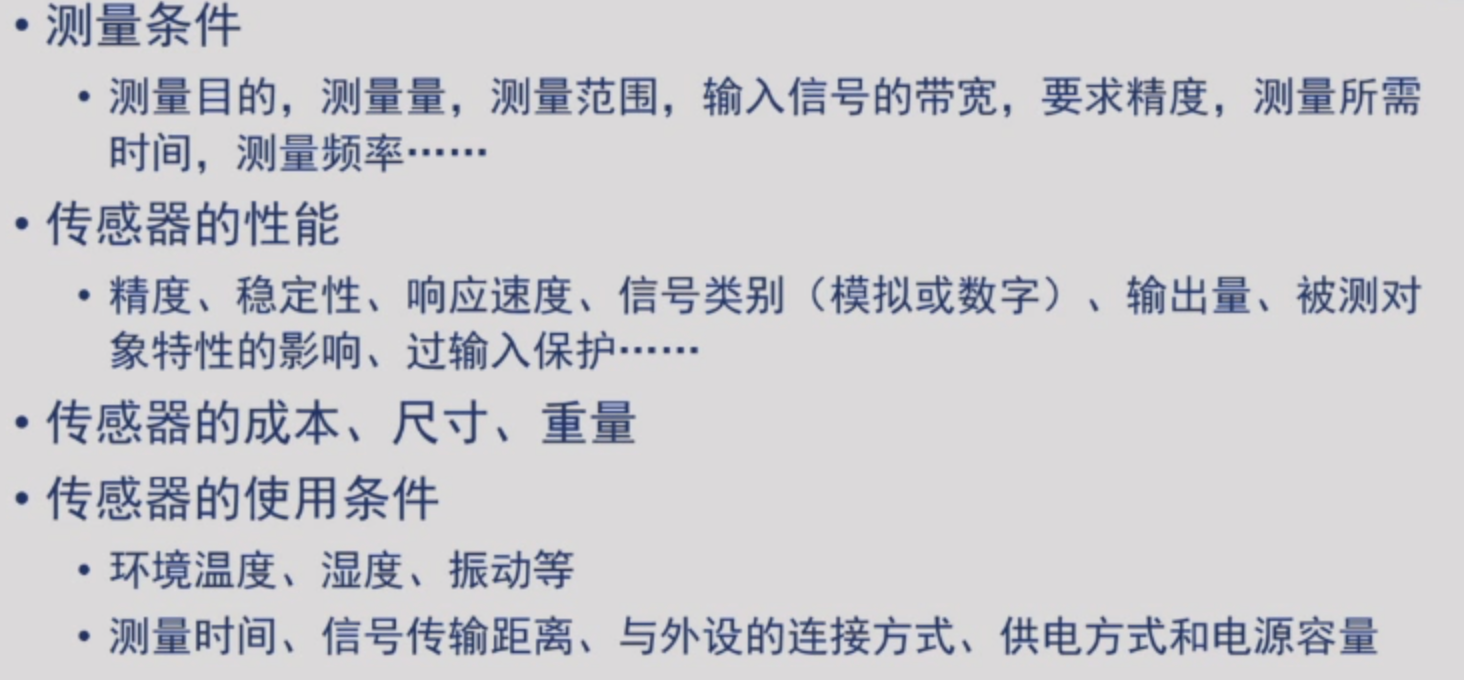
5. 传感器选择¶
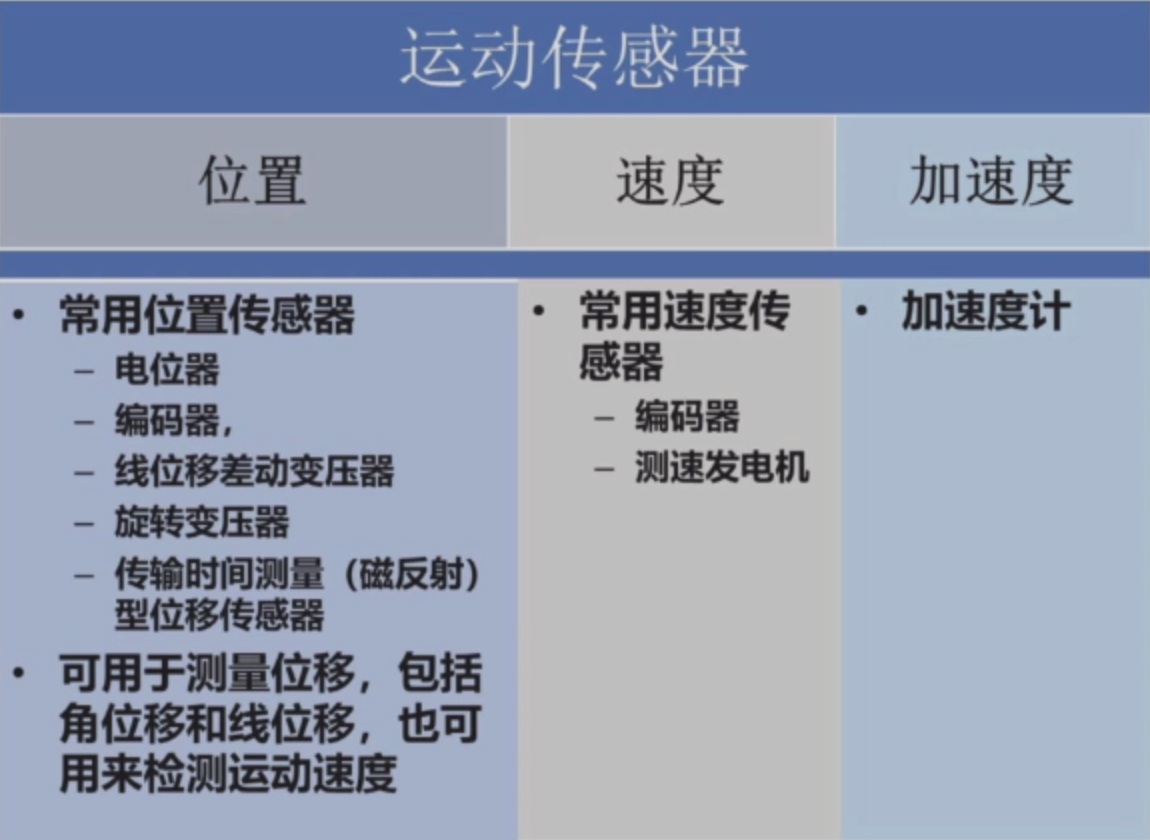
二、机器人运动传感器¶
要素与分类¶
1. 电位器¶
- 工作原理:算是直接测量;

- 用处
- 通常用作内部反馈传感器,可以检测关节和连杆的位置;
- 类别
- 旋转式:测量角位移;
- 直线式:测量线位移;
- 使用方法
编码器¶
分类¶
- 根据测量介质分
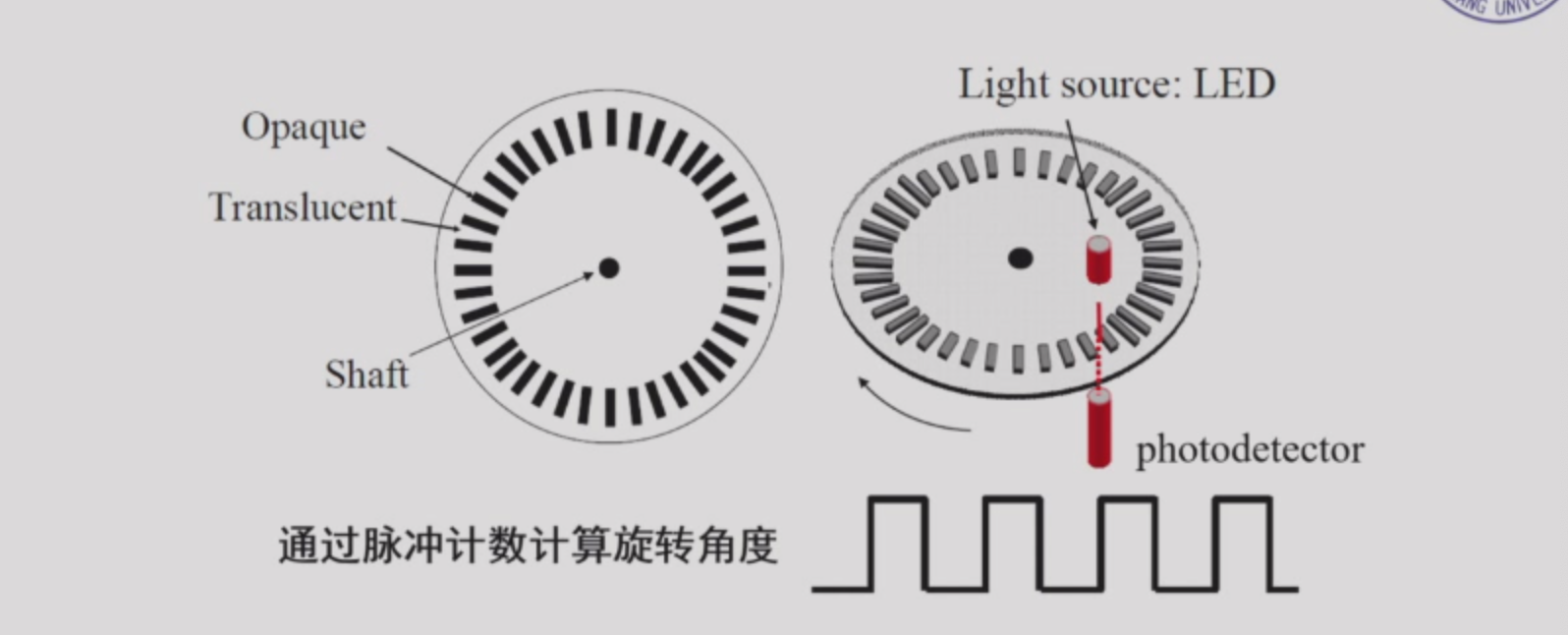
- 光电码盘
- 磁编码器
- 根据测量结果分
- 增量式
- 绝对式
光电码盘 各种例子¶
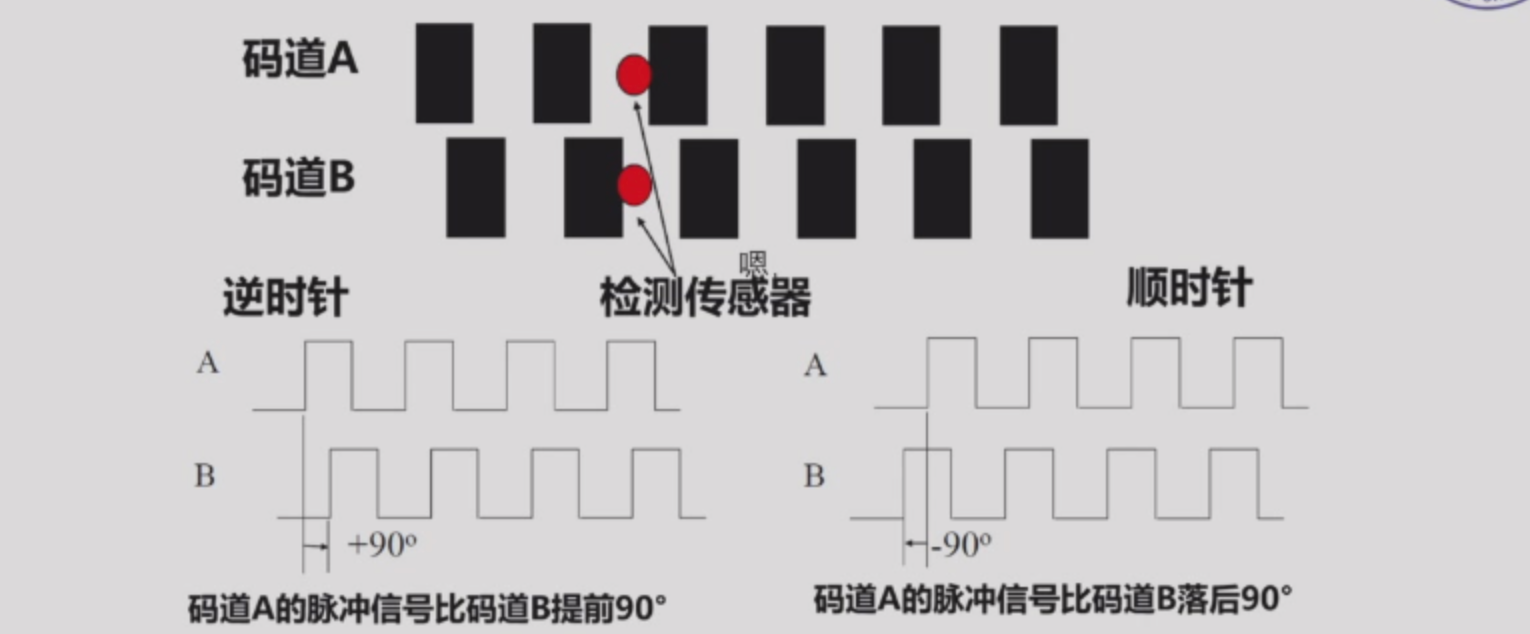
- 增量式光电编码器
-
绝对式光电编码器
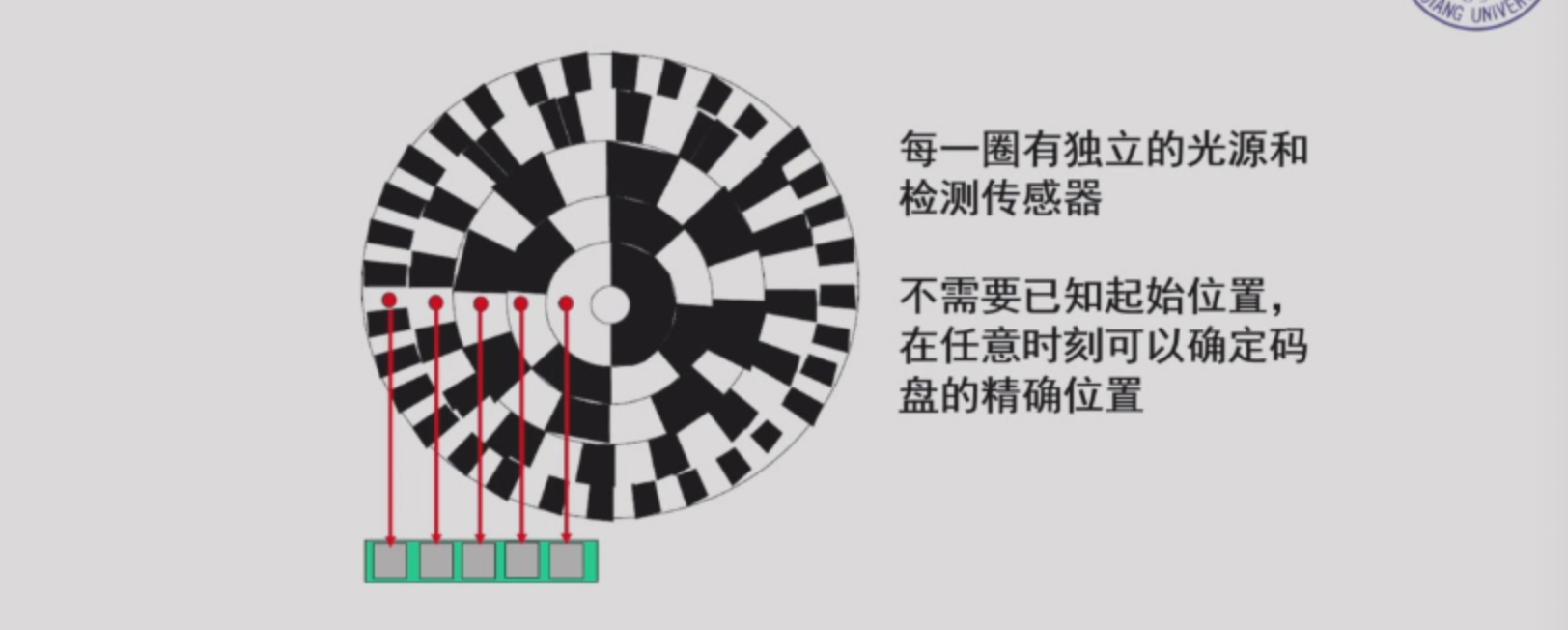
-
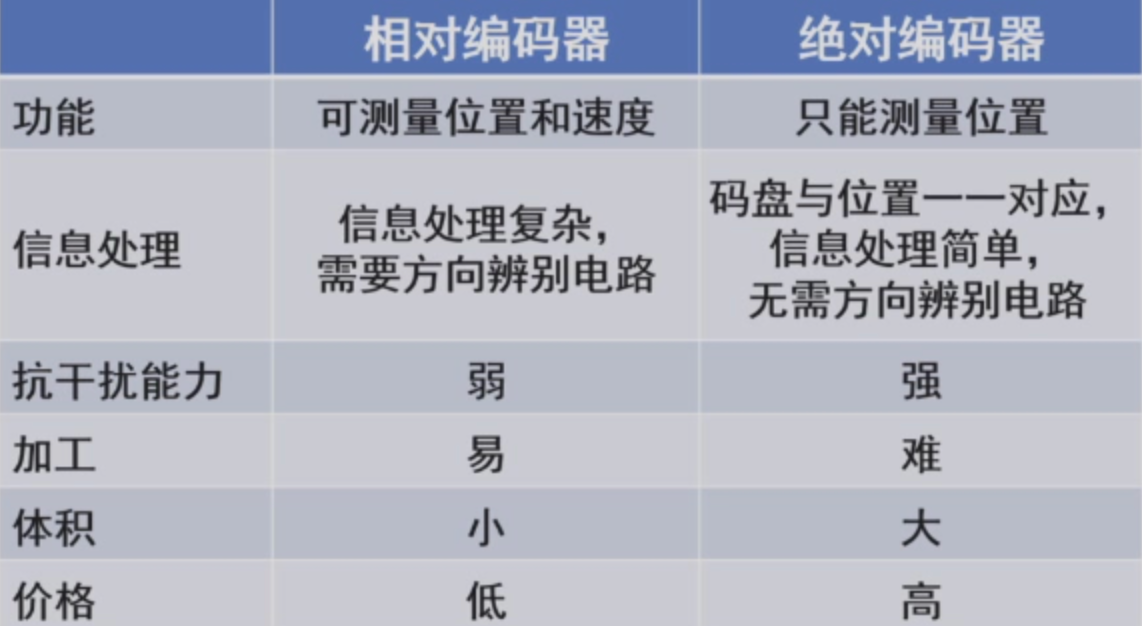
两种编码器比较
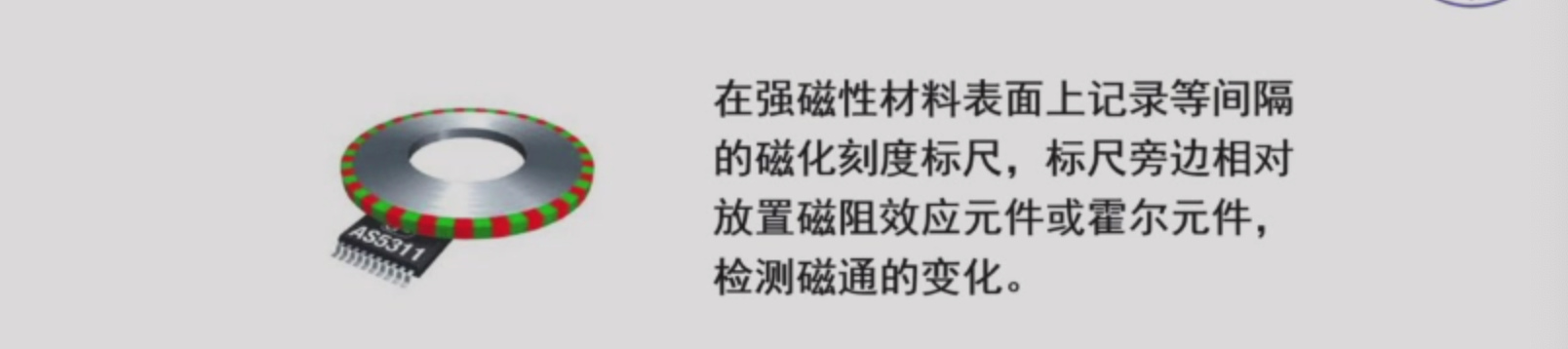
磁编码器¶
多用于测量可以连续变化的,或者是光电码盘收到影响;
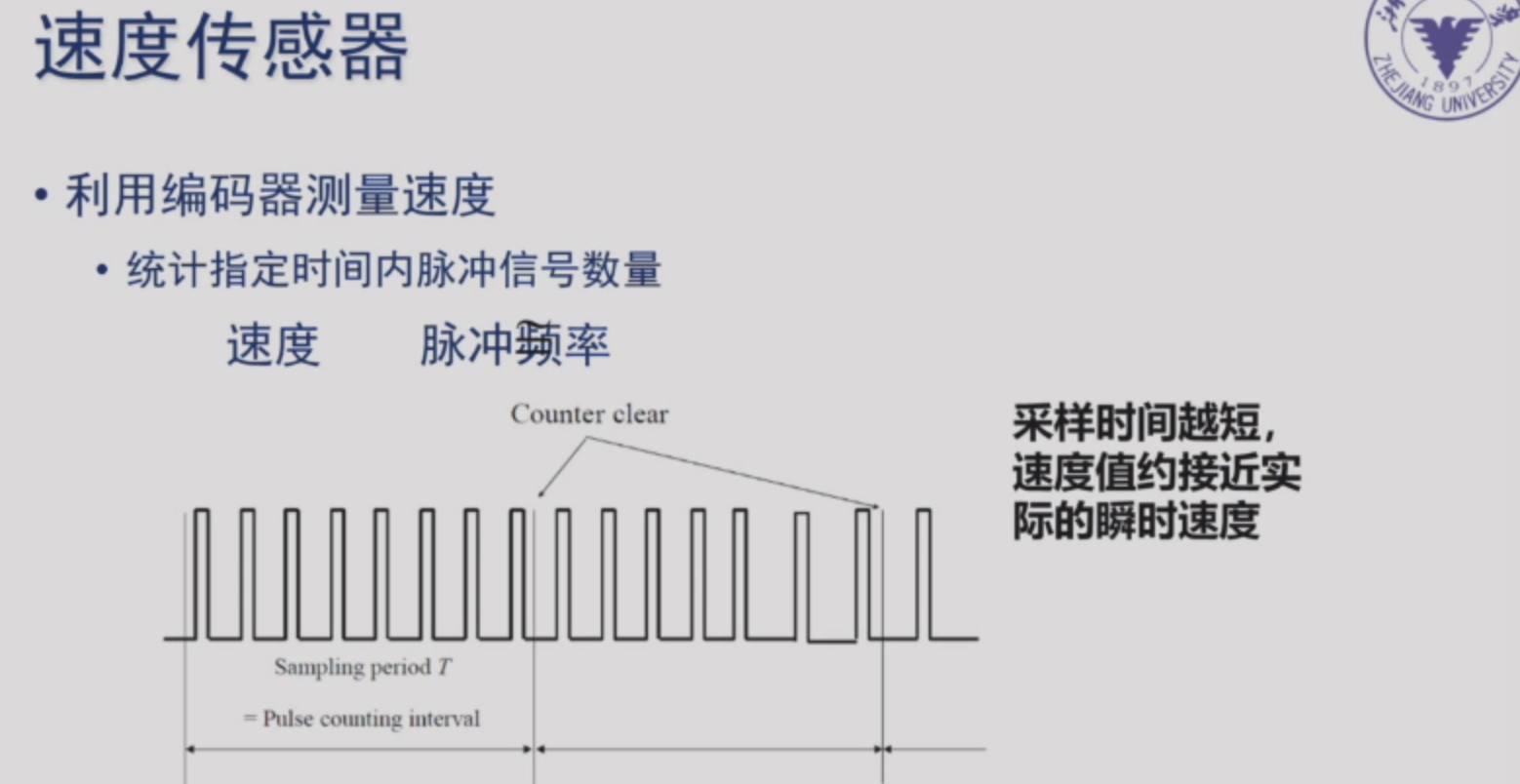
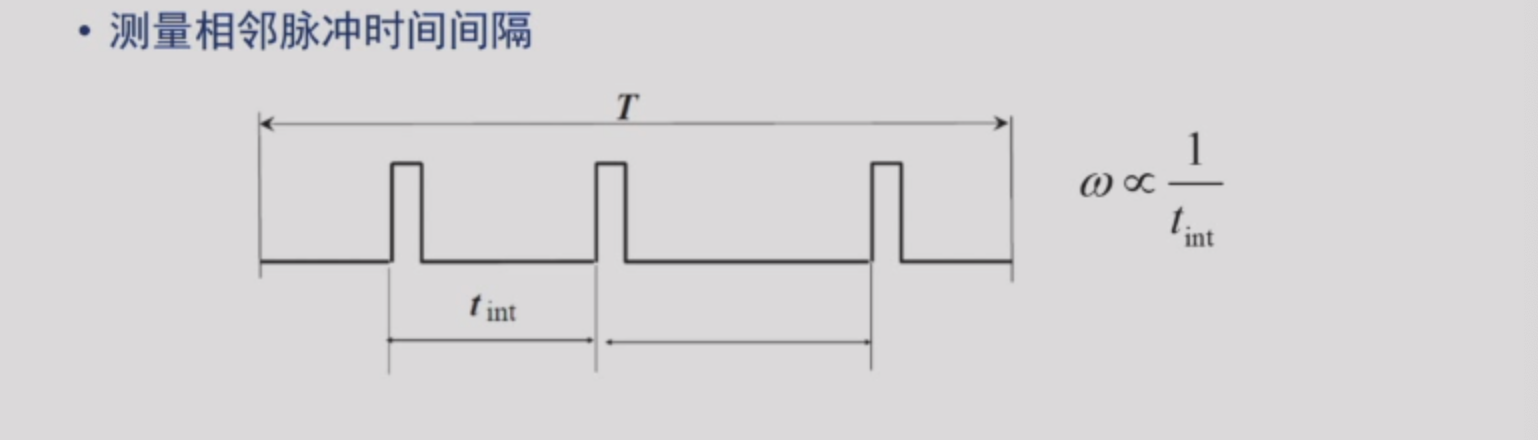
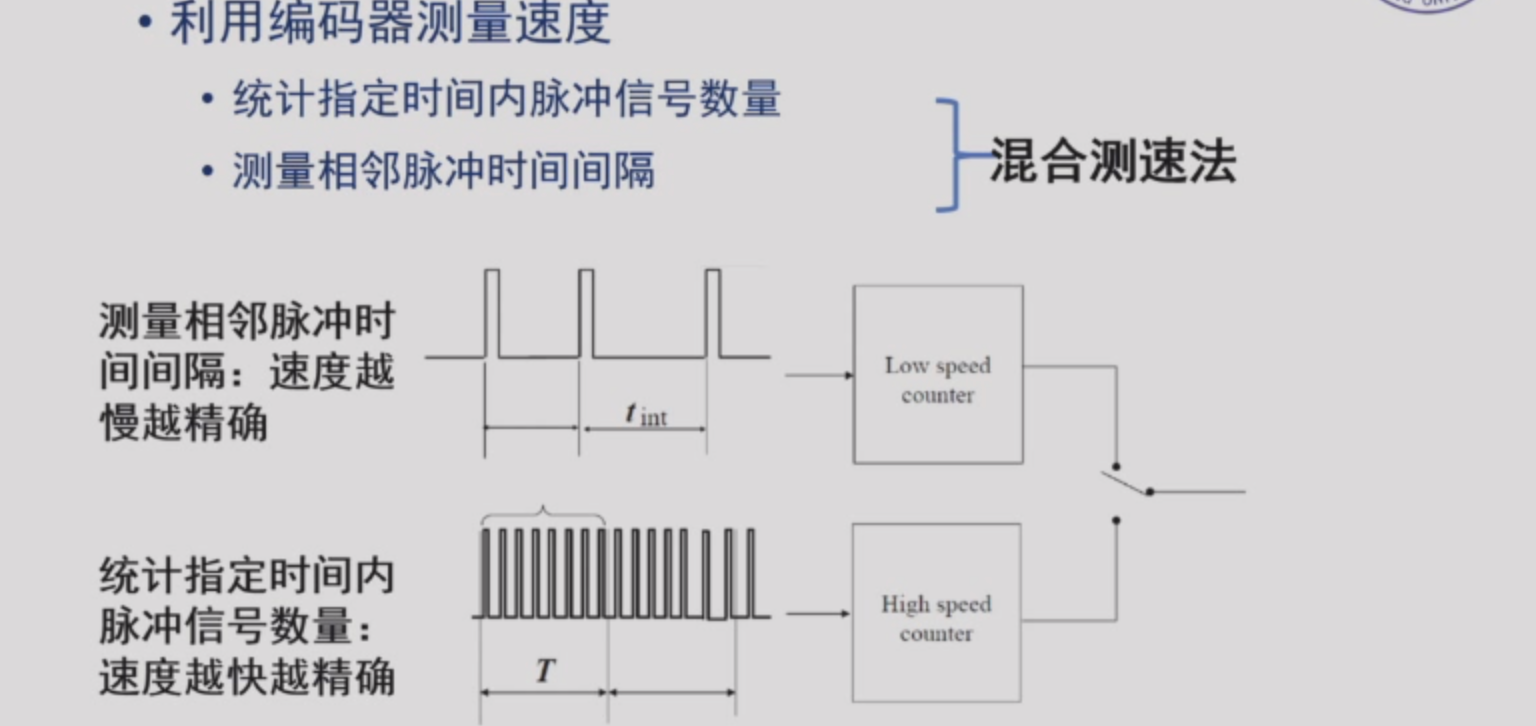
2. 速度传感器¶
测速度都不是直接测,而是求位移比时间;
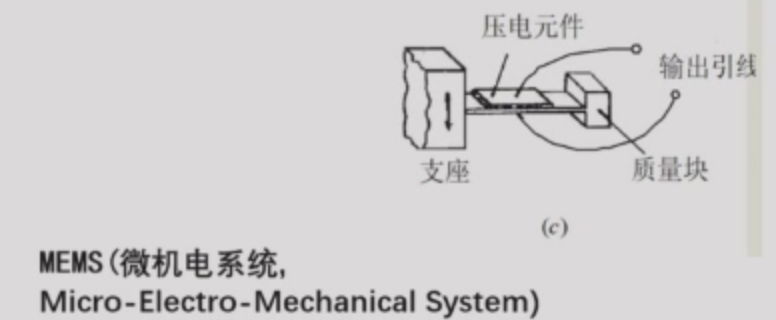
3. 加速度传感器¶
- 基本原理:利用加速度造成某个介质产生变形,通过测量其变形量并用相关电路转化成电压输出,如电压晶体;
- F = ma,算是直接测量;
- 做三个,就可以在xyz三个方向进行测量;
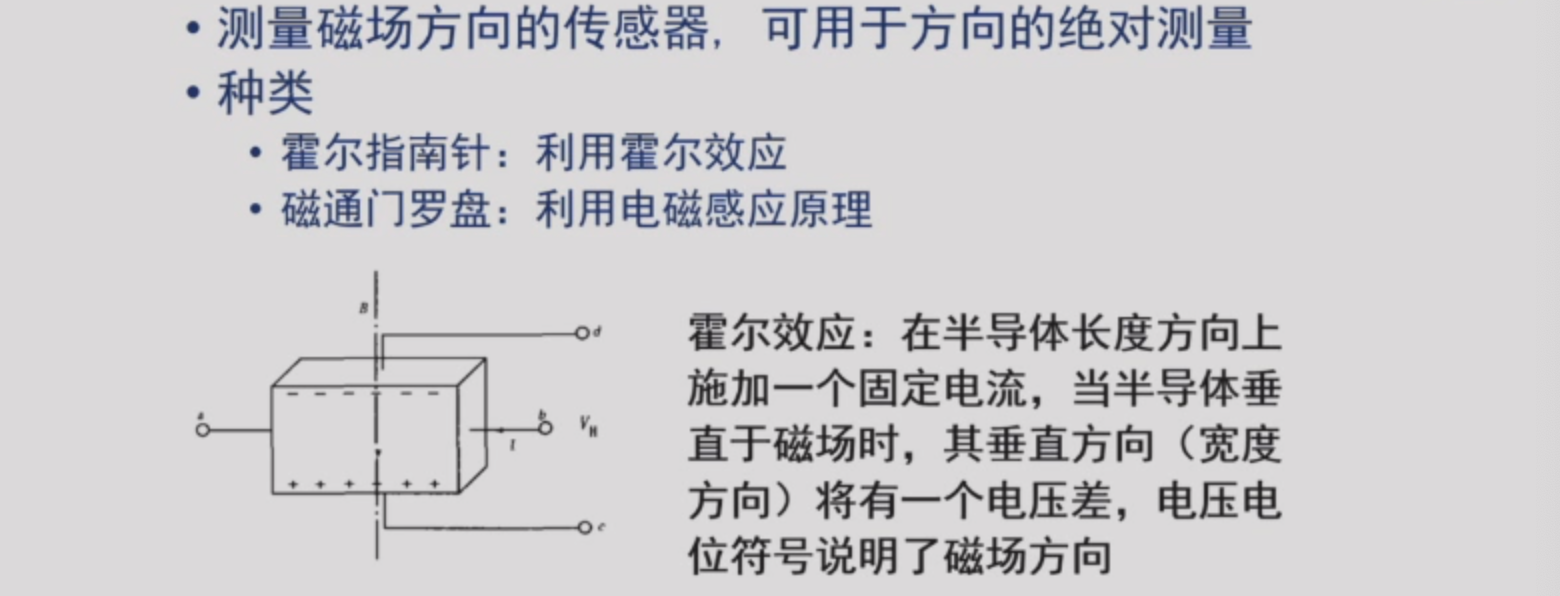
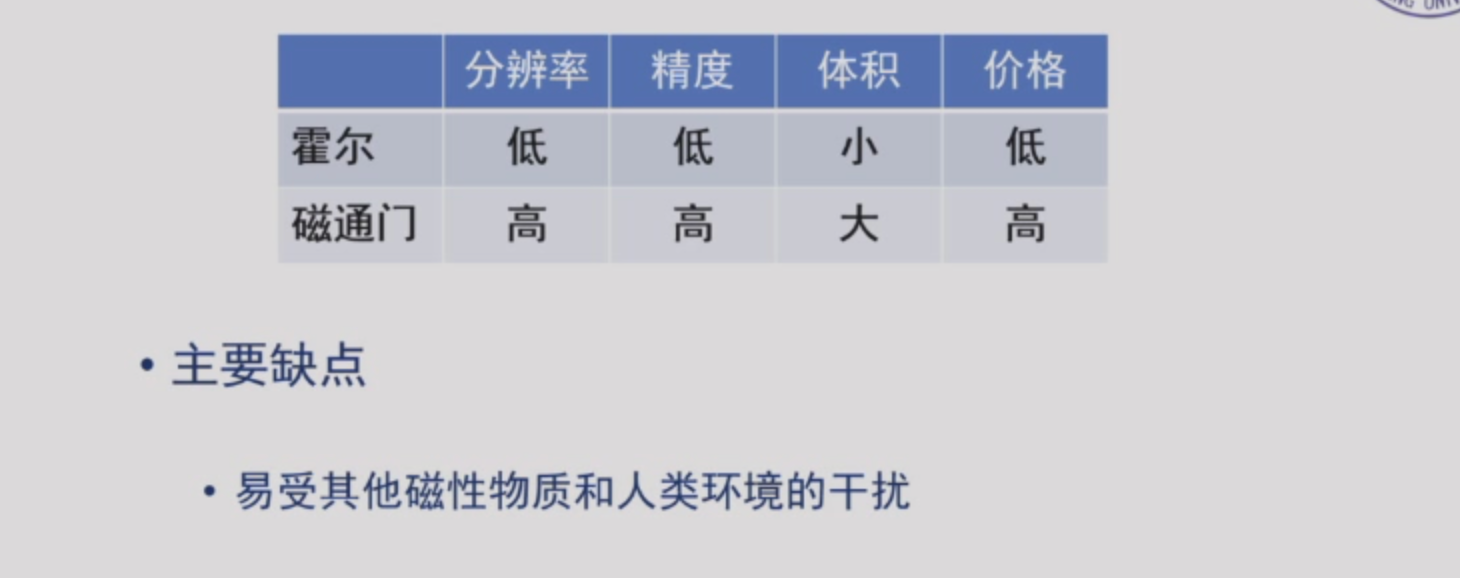
三、机器人方位角传感器¶
指南针¶
陀螺仪¶

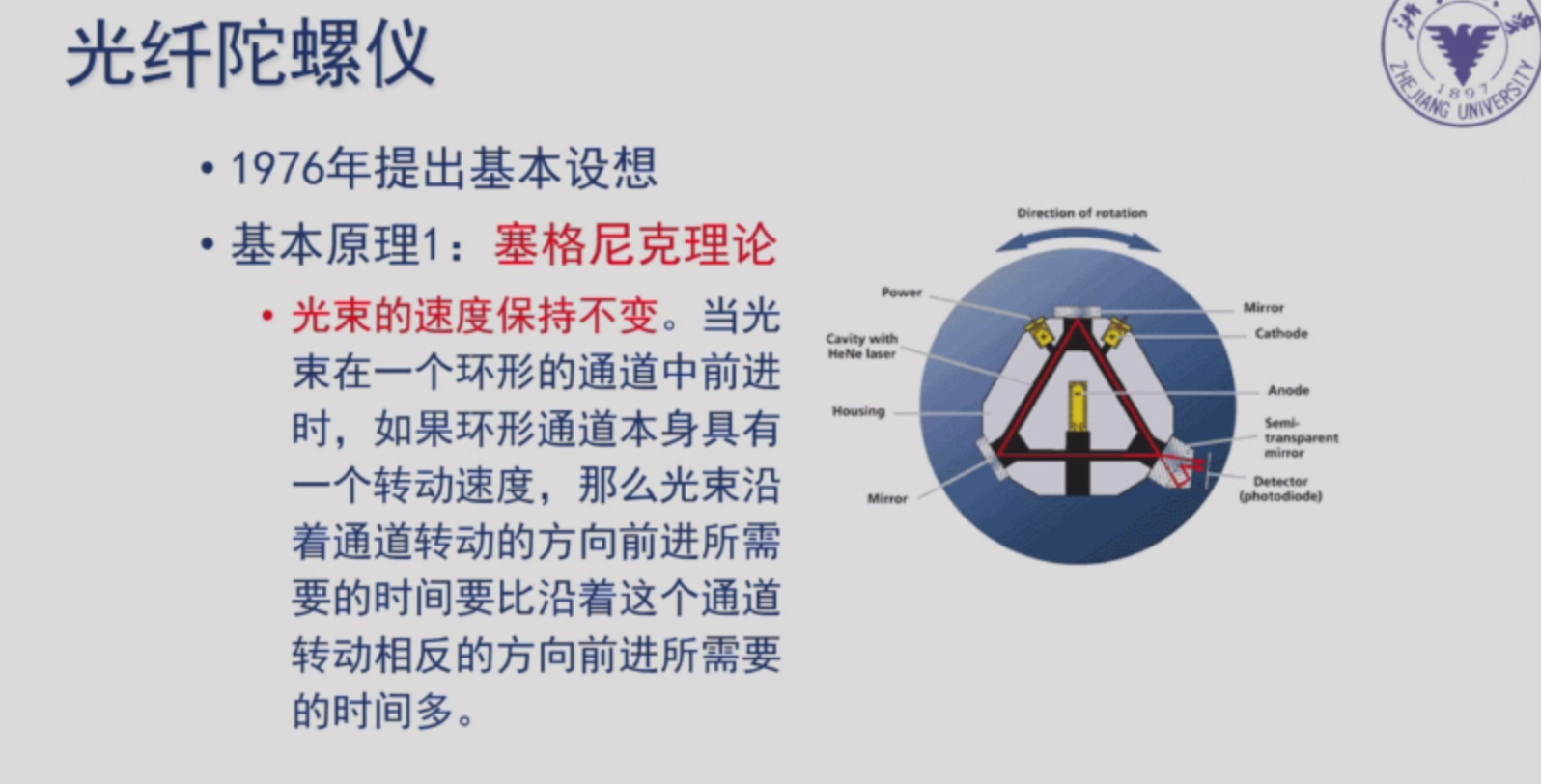
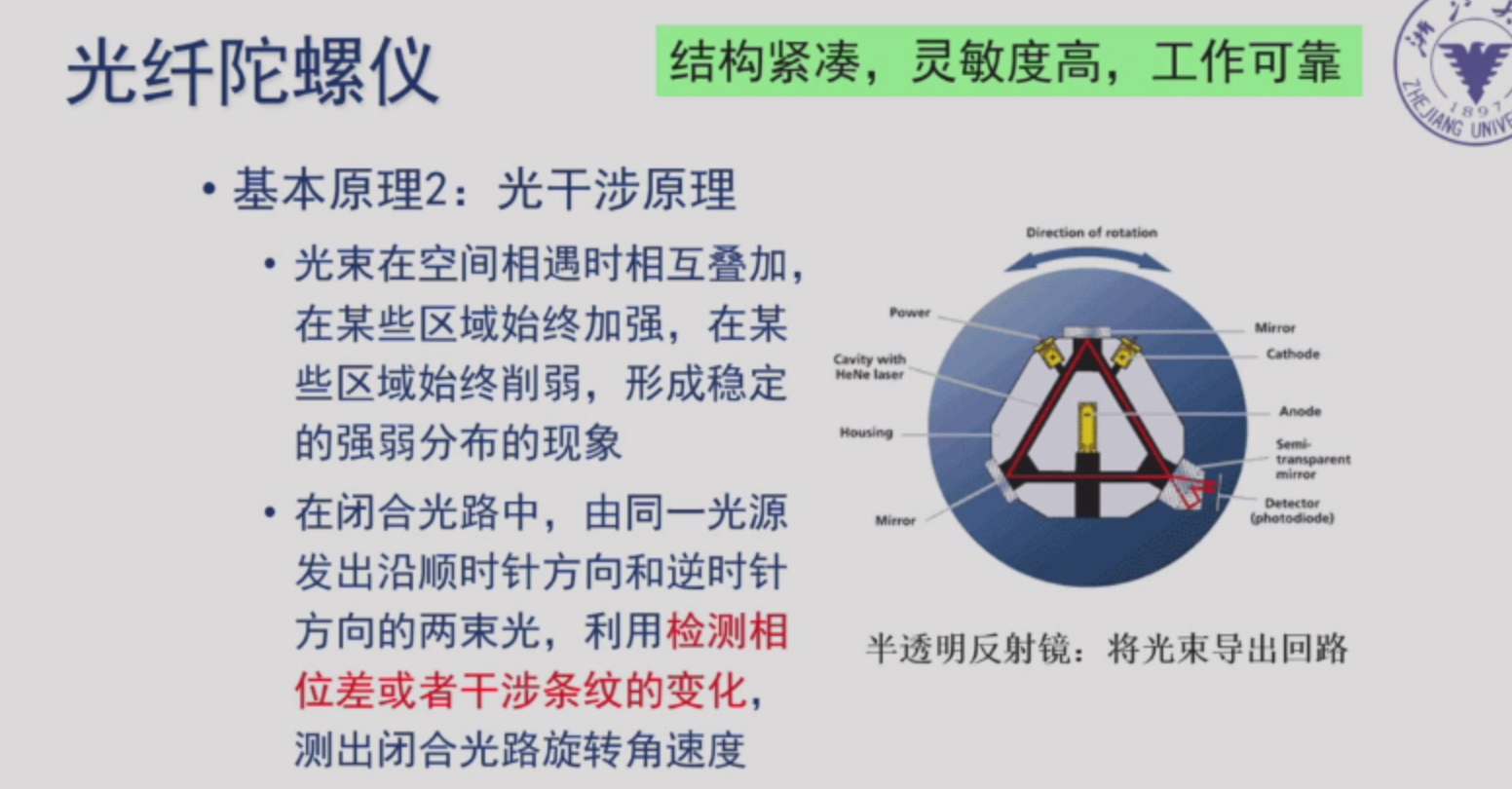
光纤陀螺仪¶
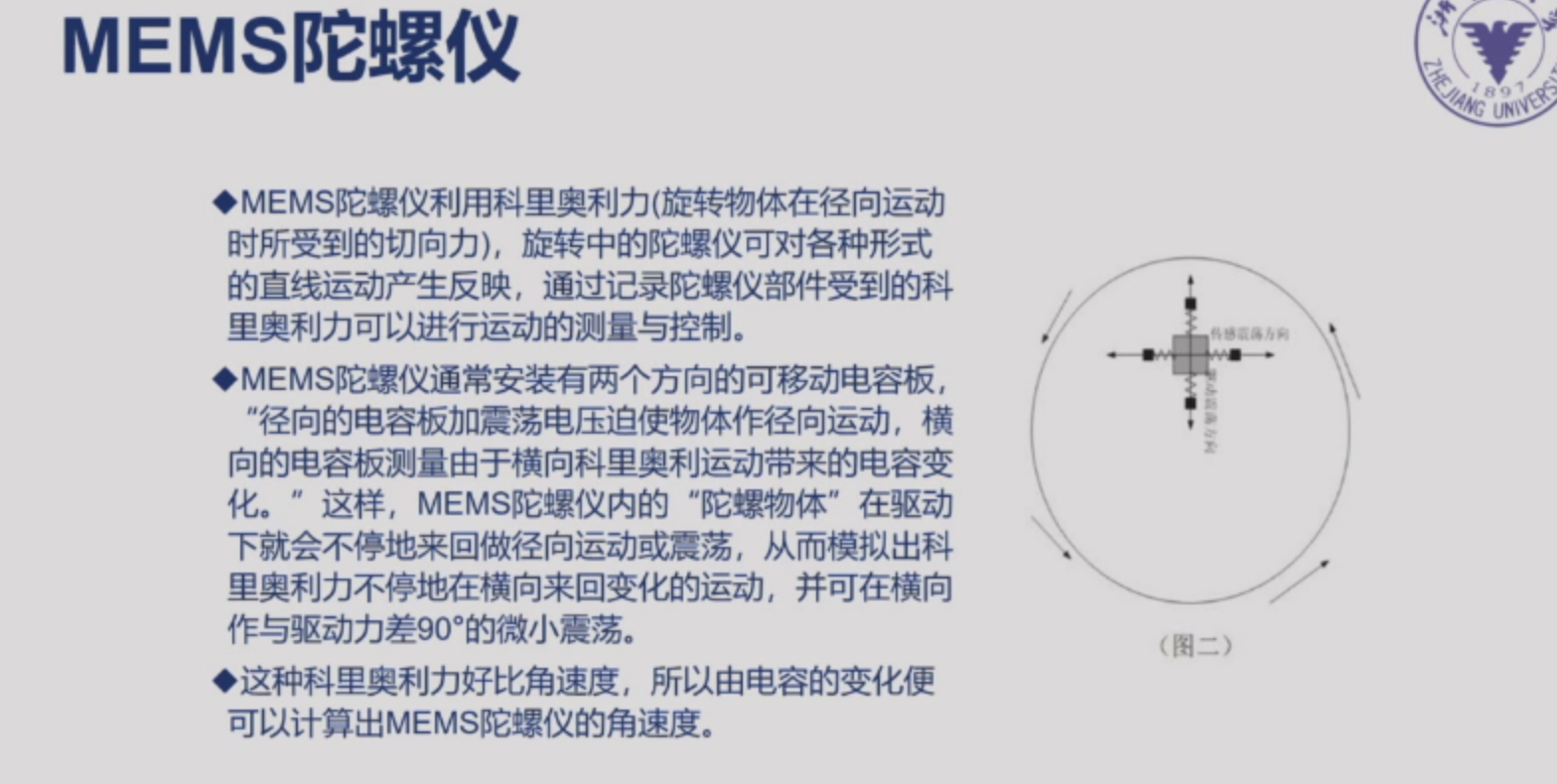
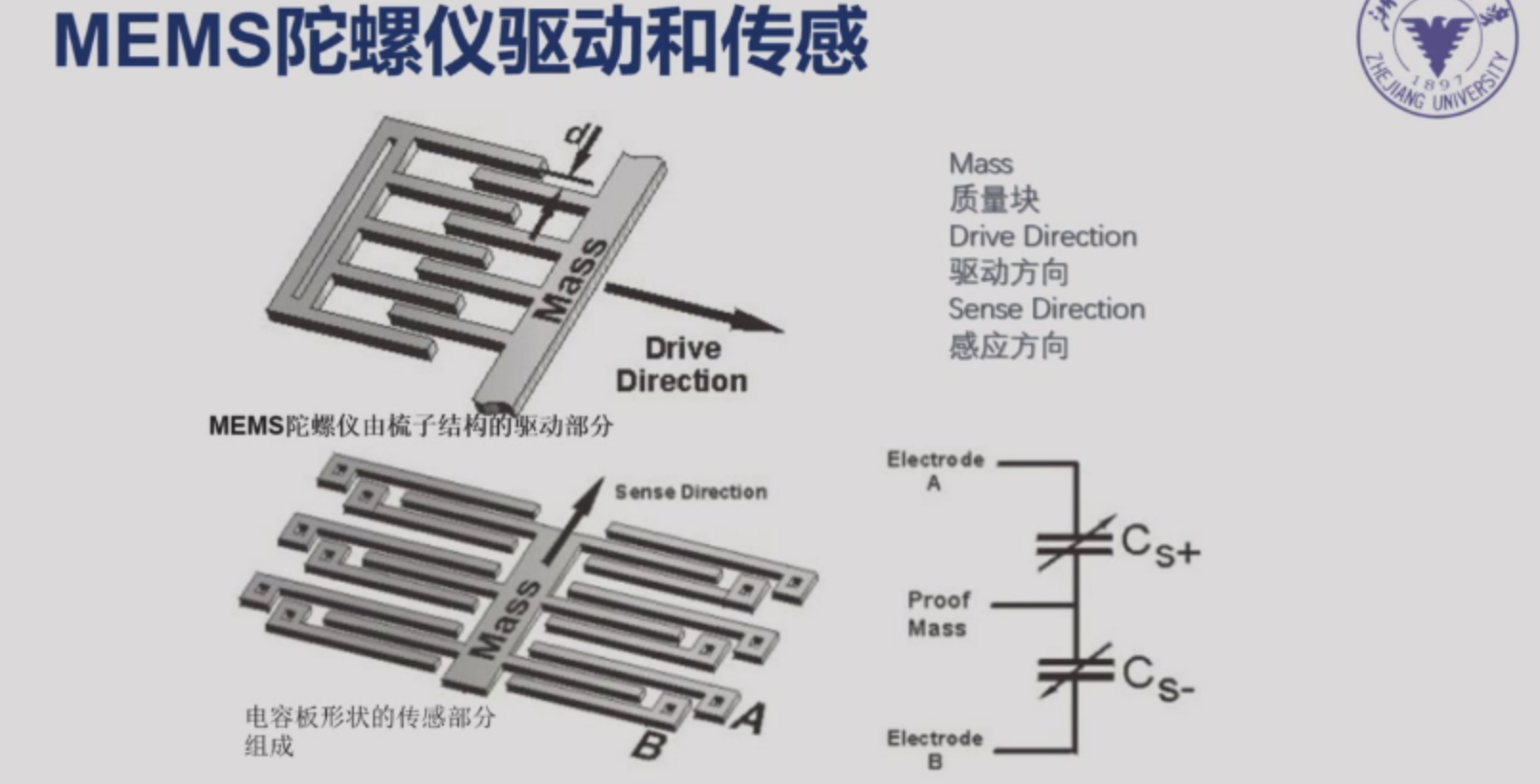
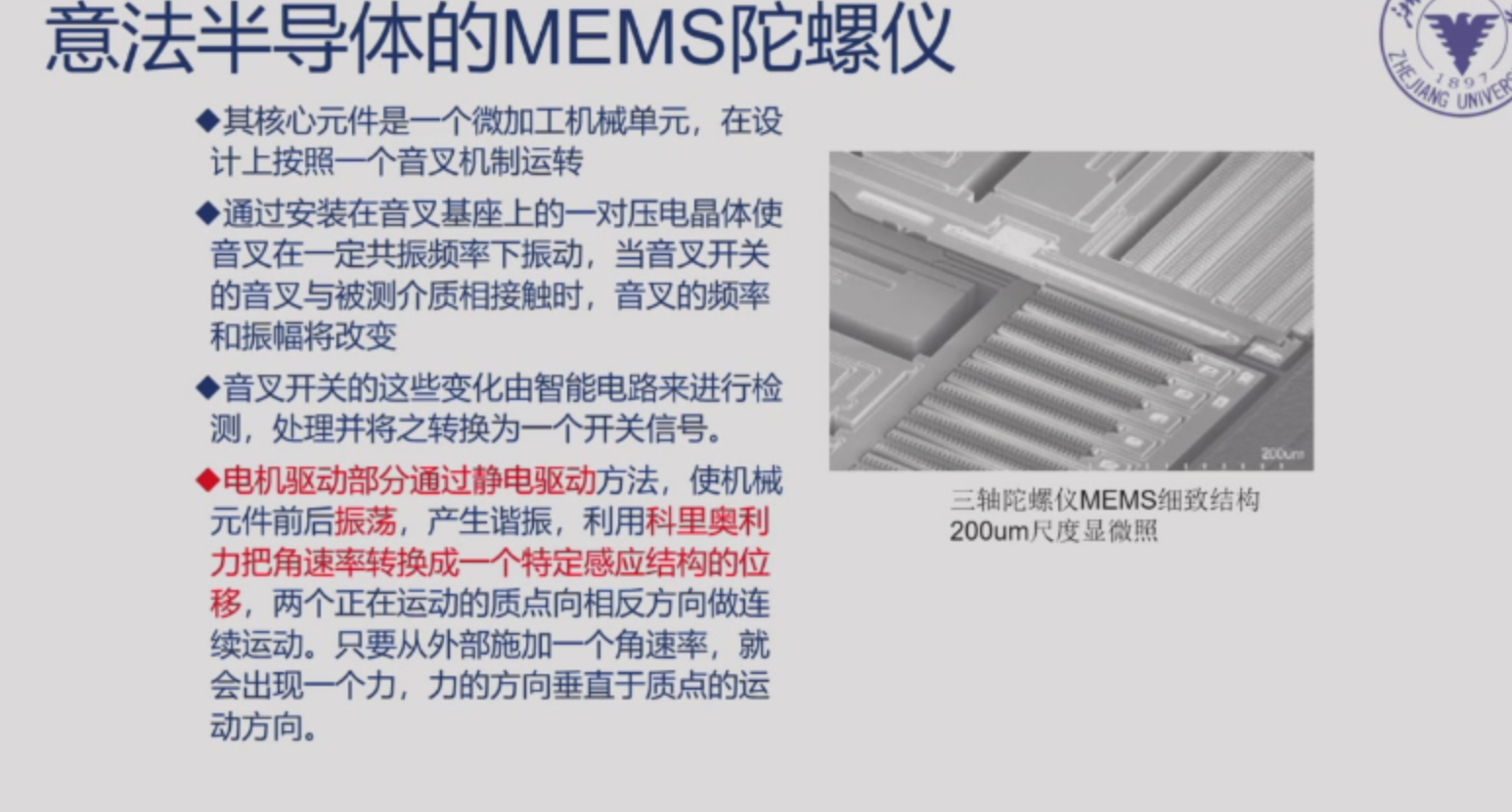
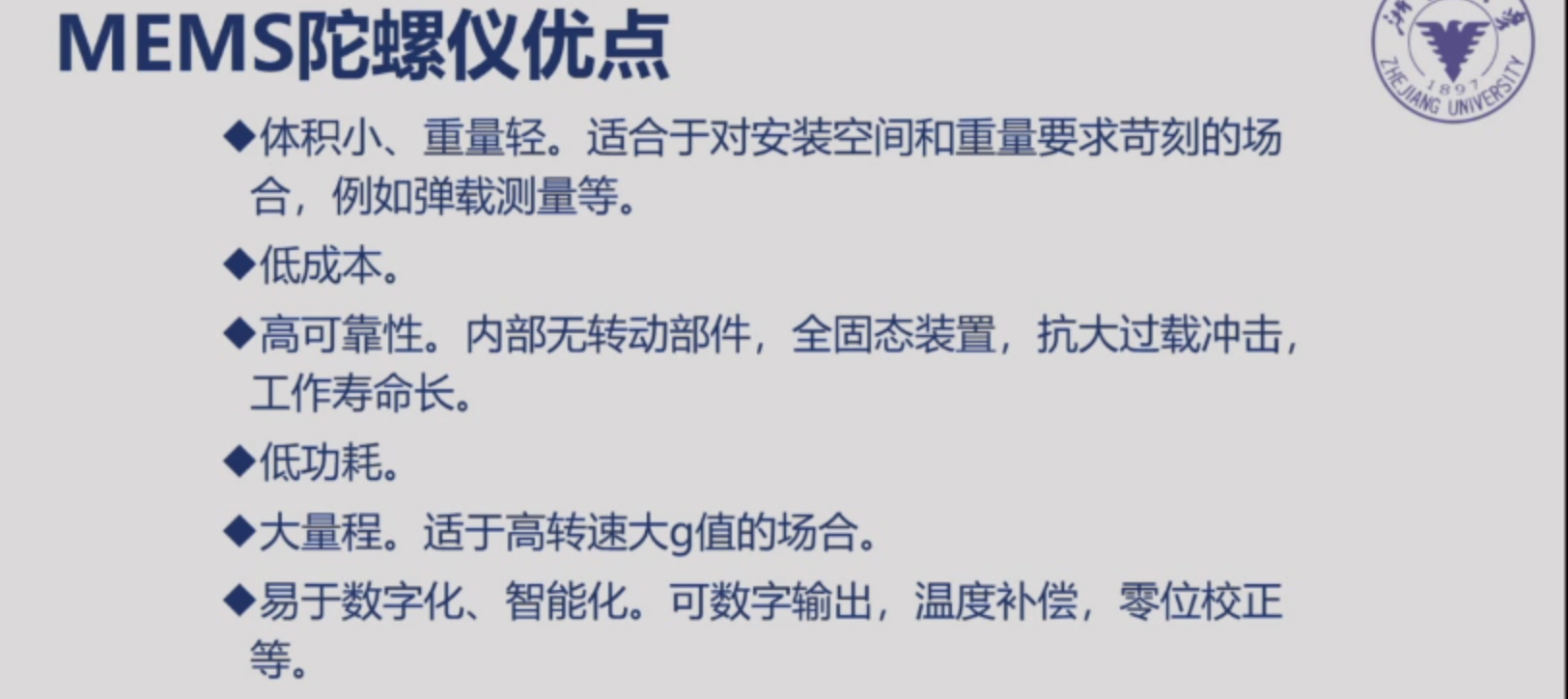
MEMS陀螺仪¶
- 缺点:东南西北分不清;
四、机器人测距传感器¶
接近觉¶
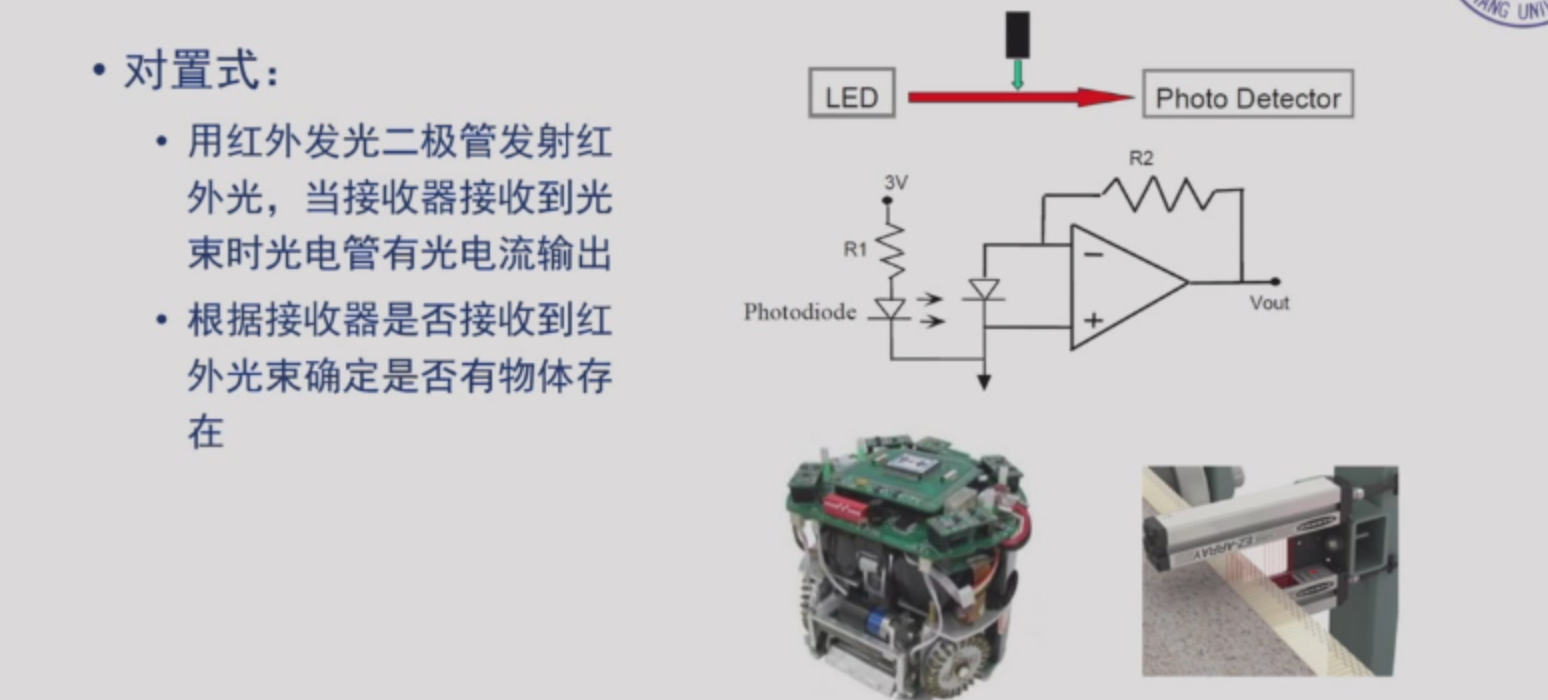
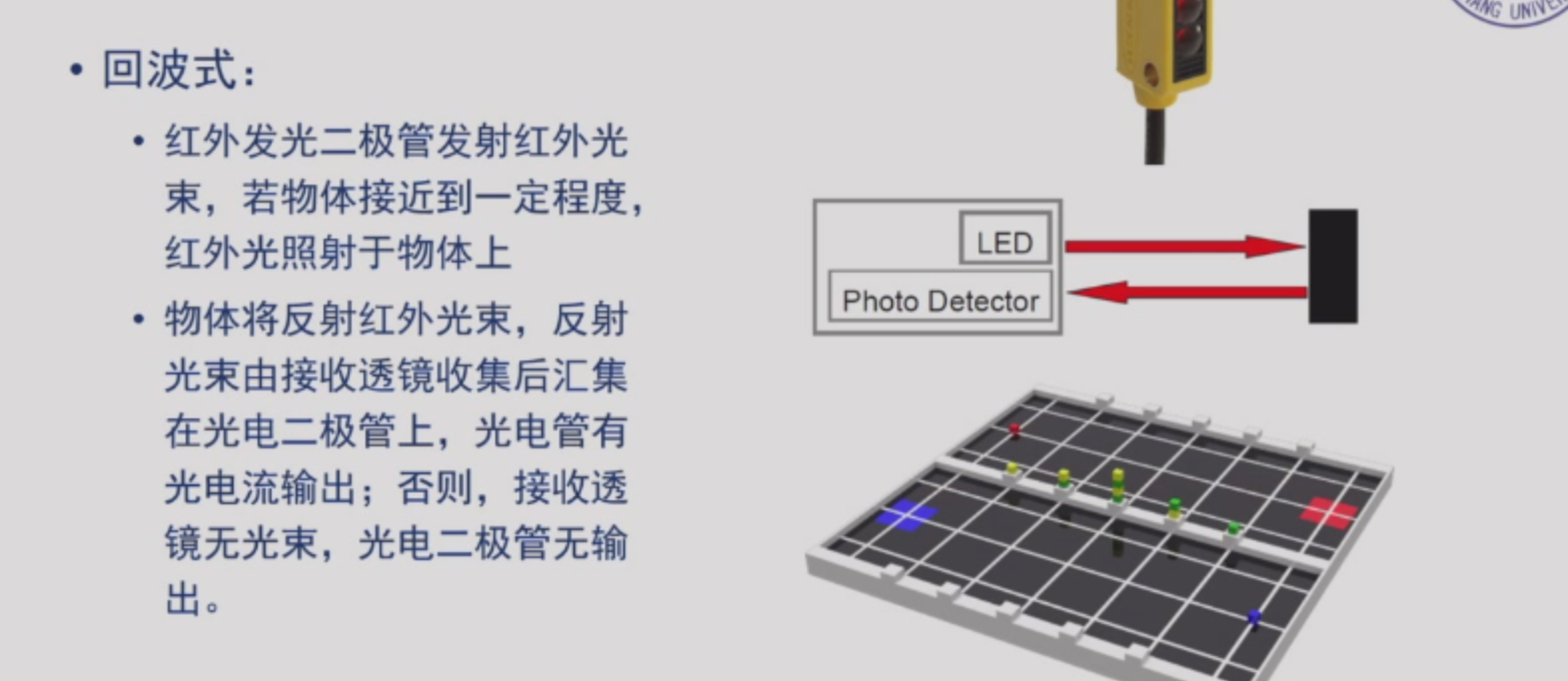
光学接近觉传感器¶
超声波接近觉传感器¶
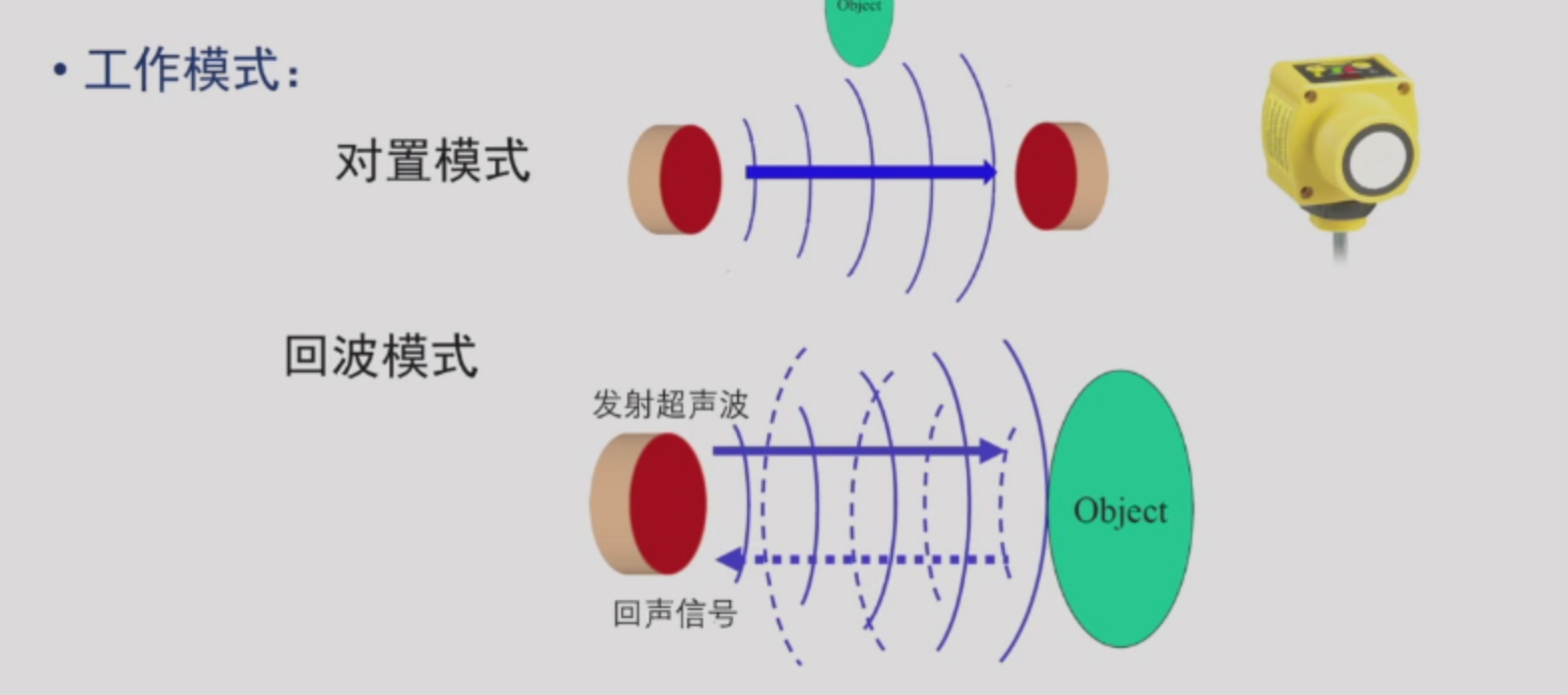
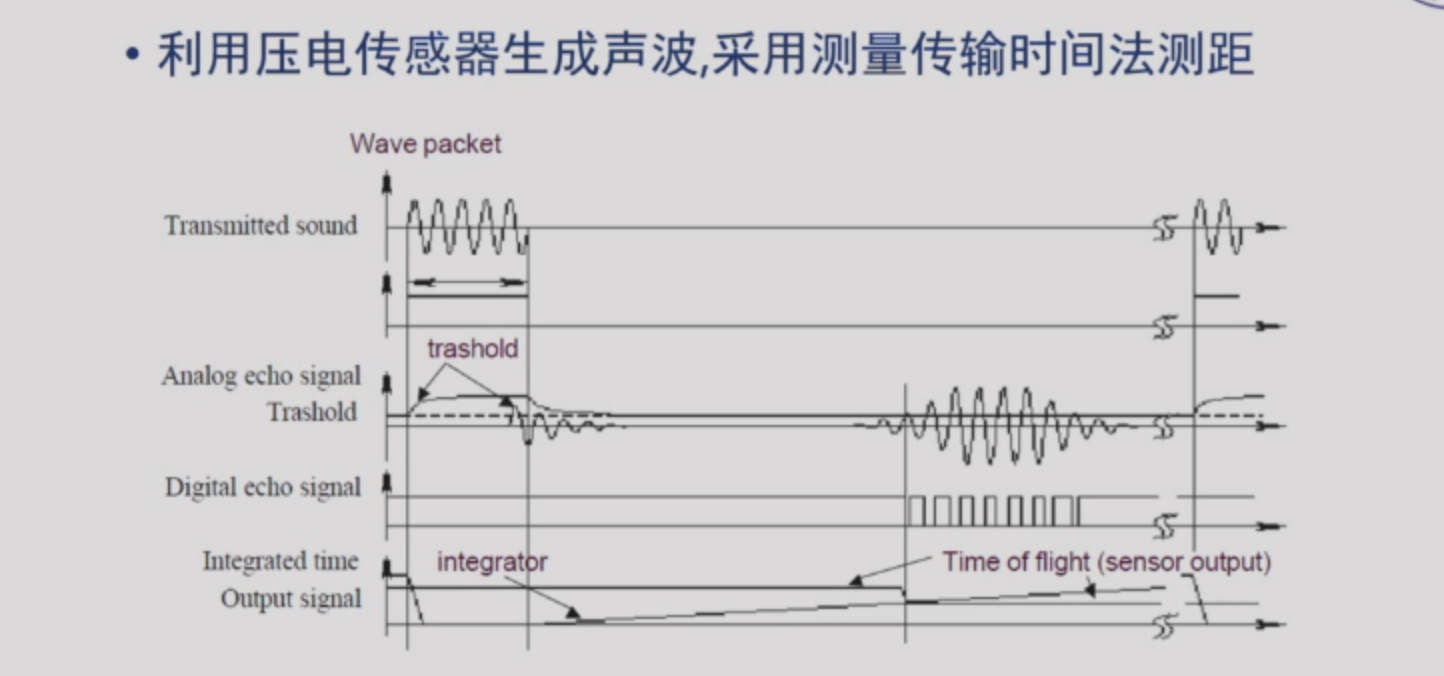
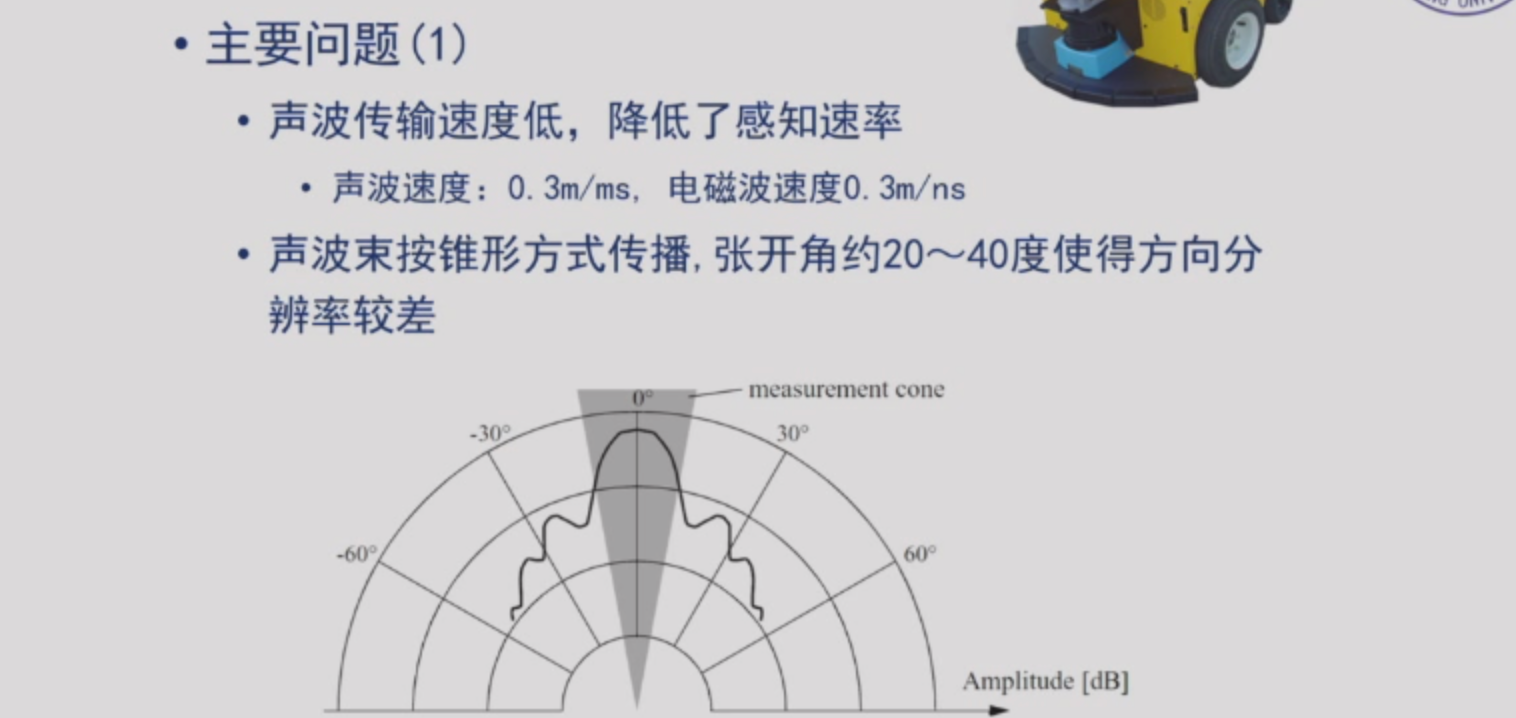 而且因为是发散的,所以不能分辨障碍物的大小;
而且因为是发散的,所以不能分辨障碍物的大小;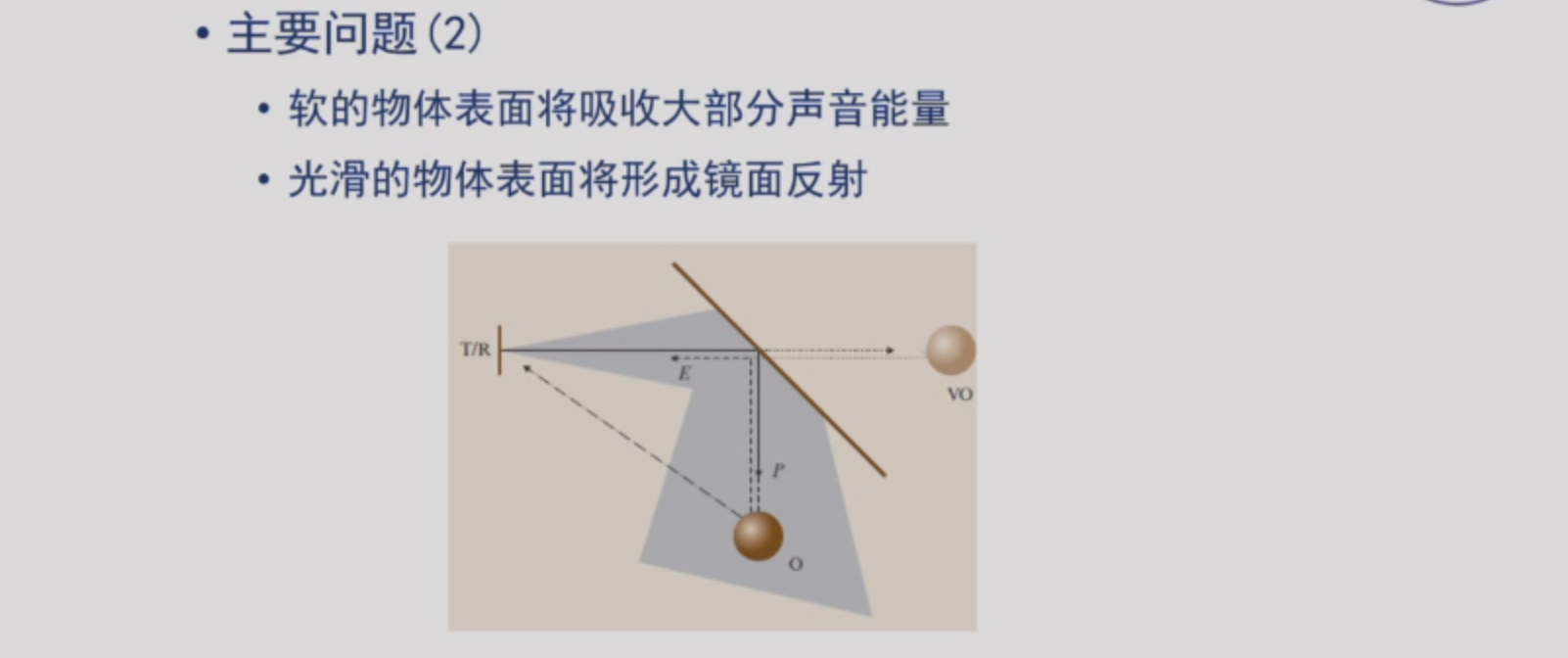
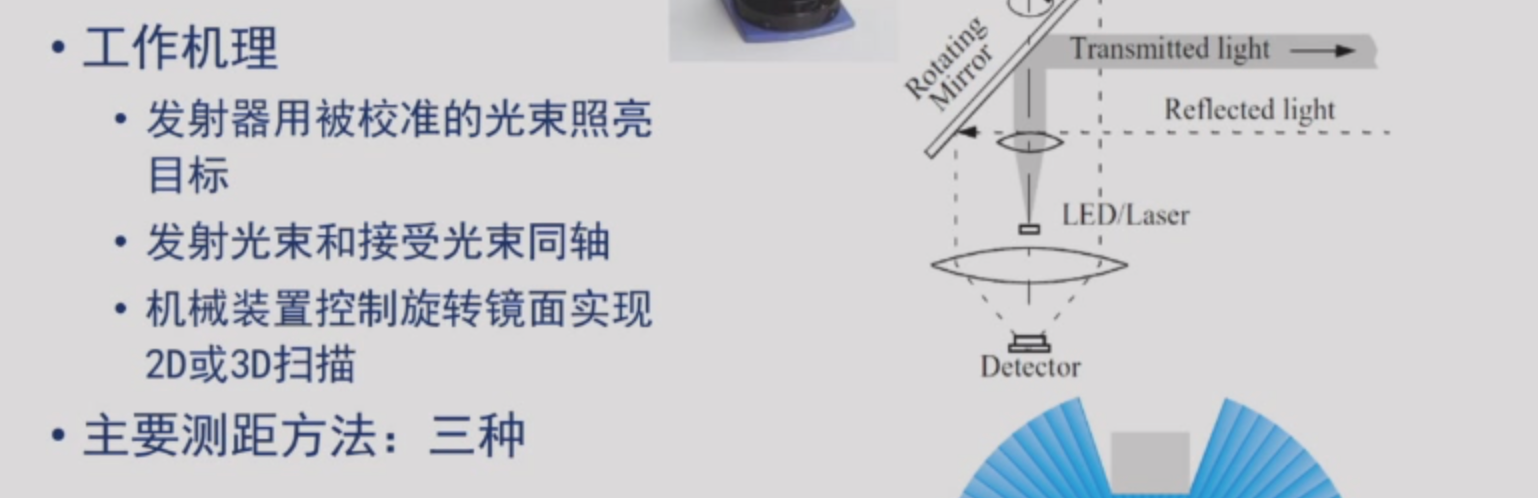
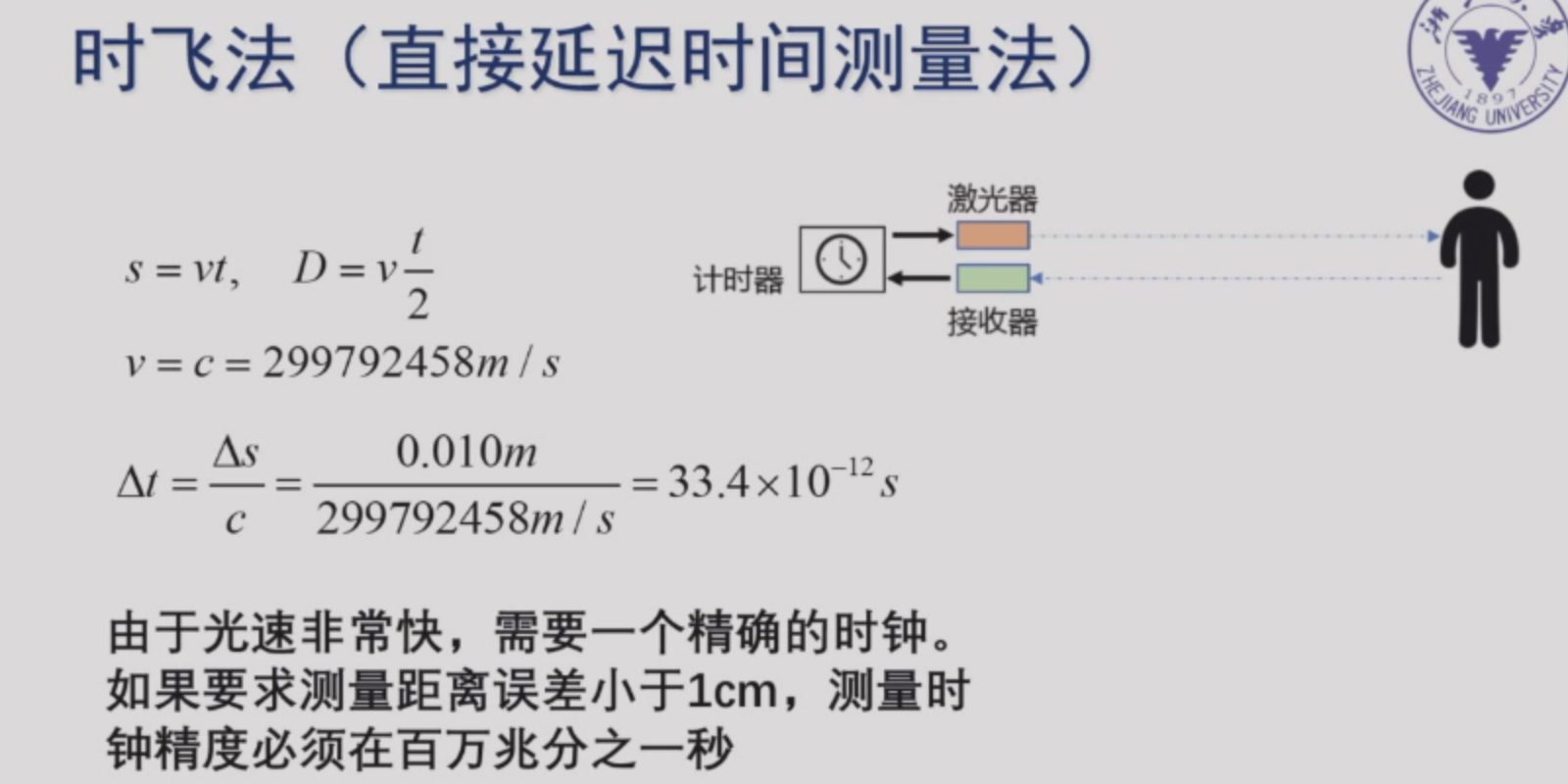
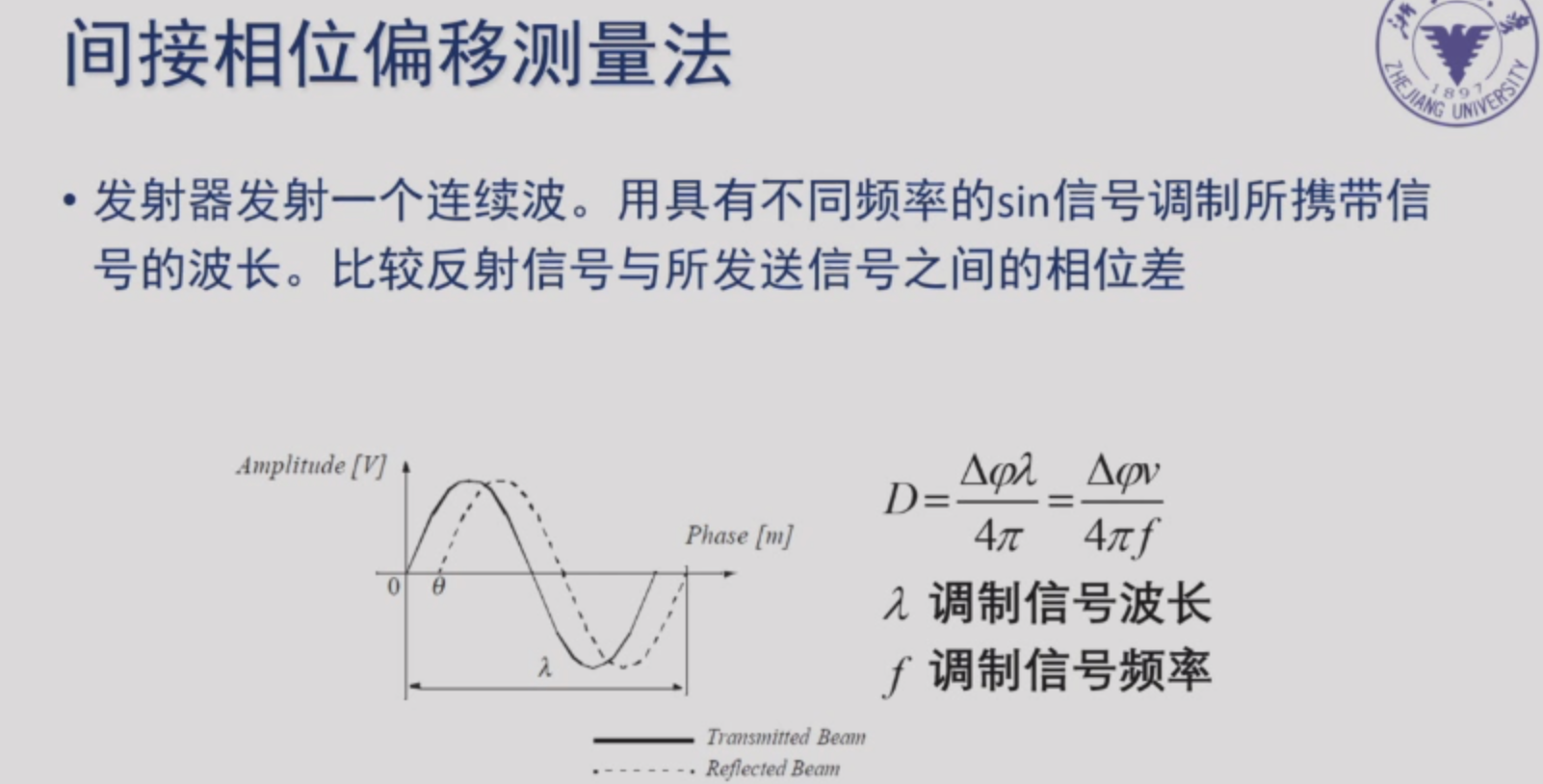
激光测距仪¶
五、其他传感器¶
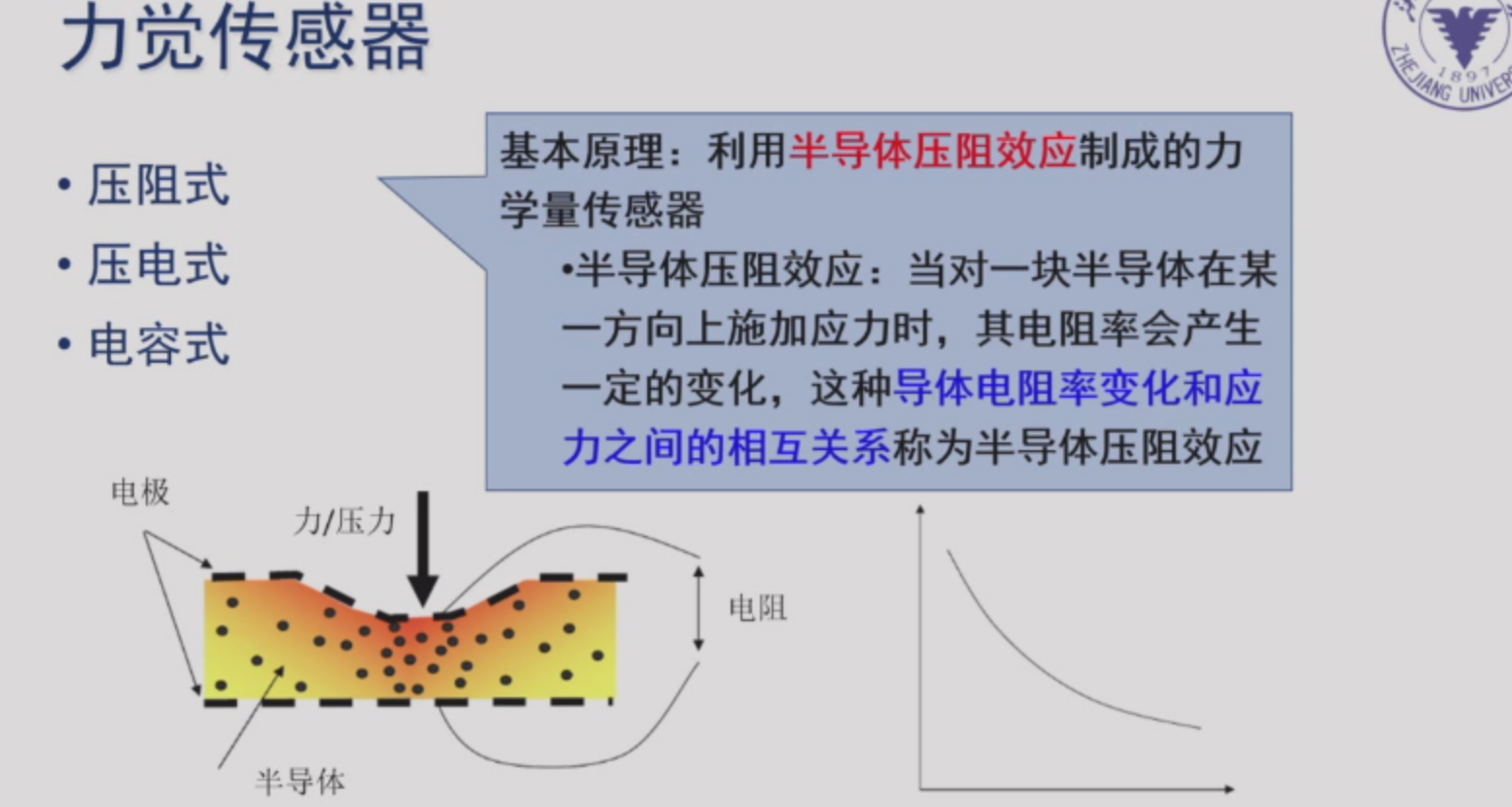
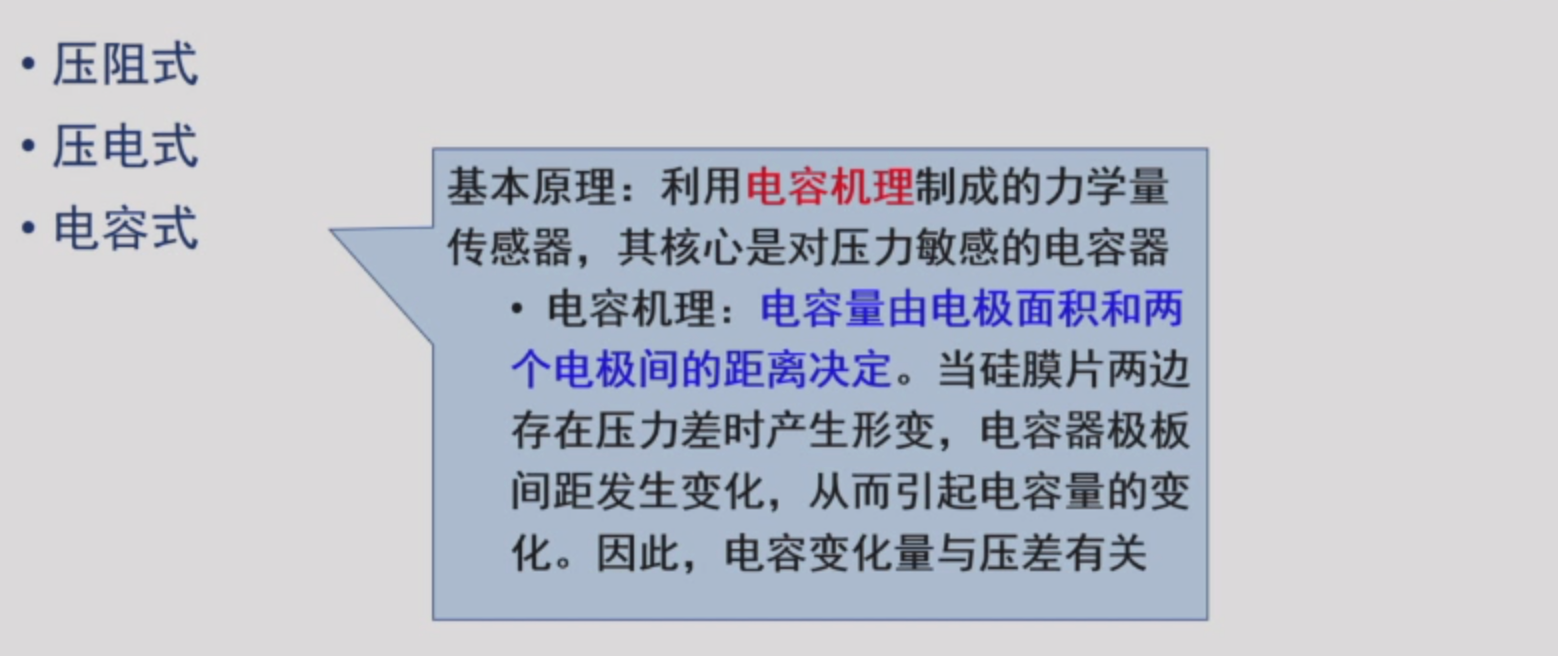
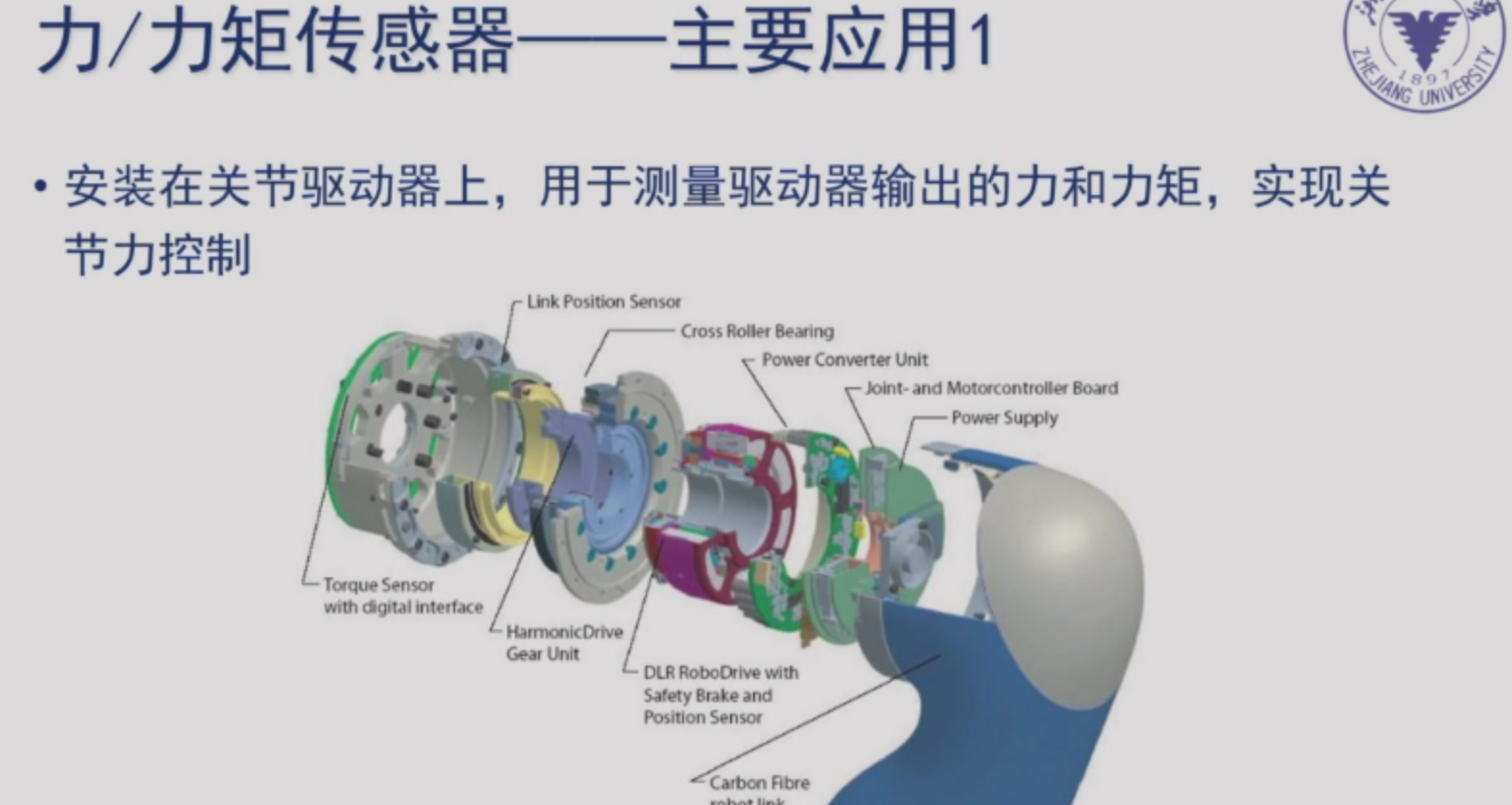
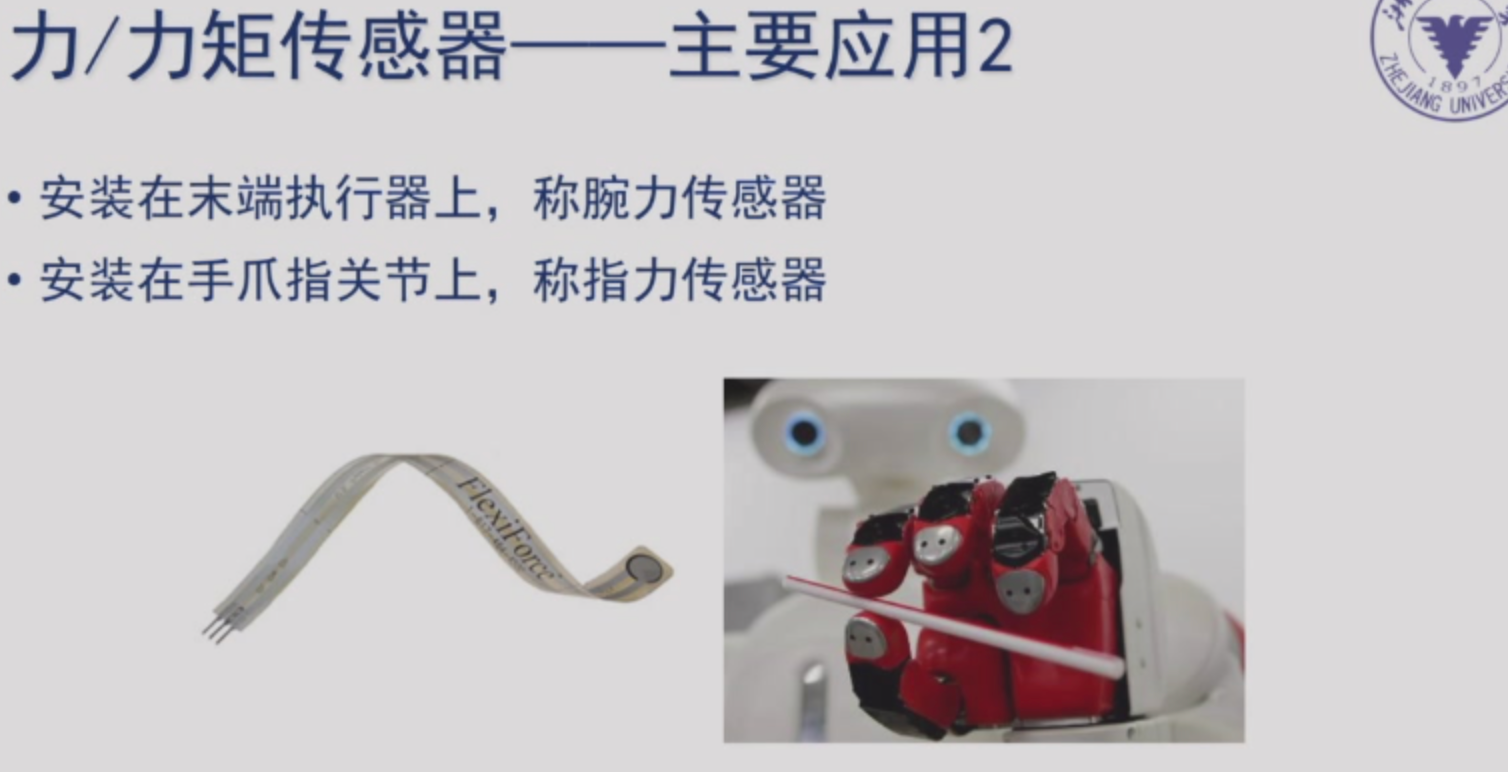
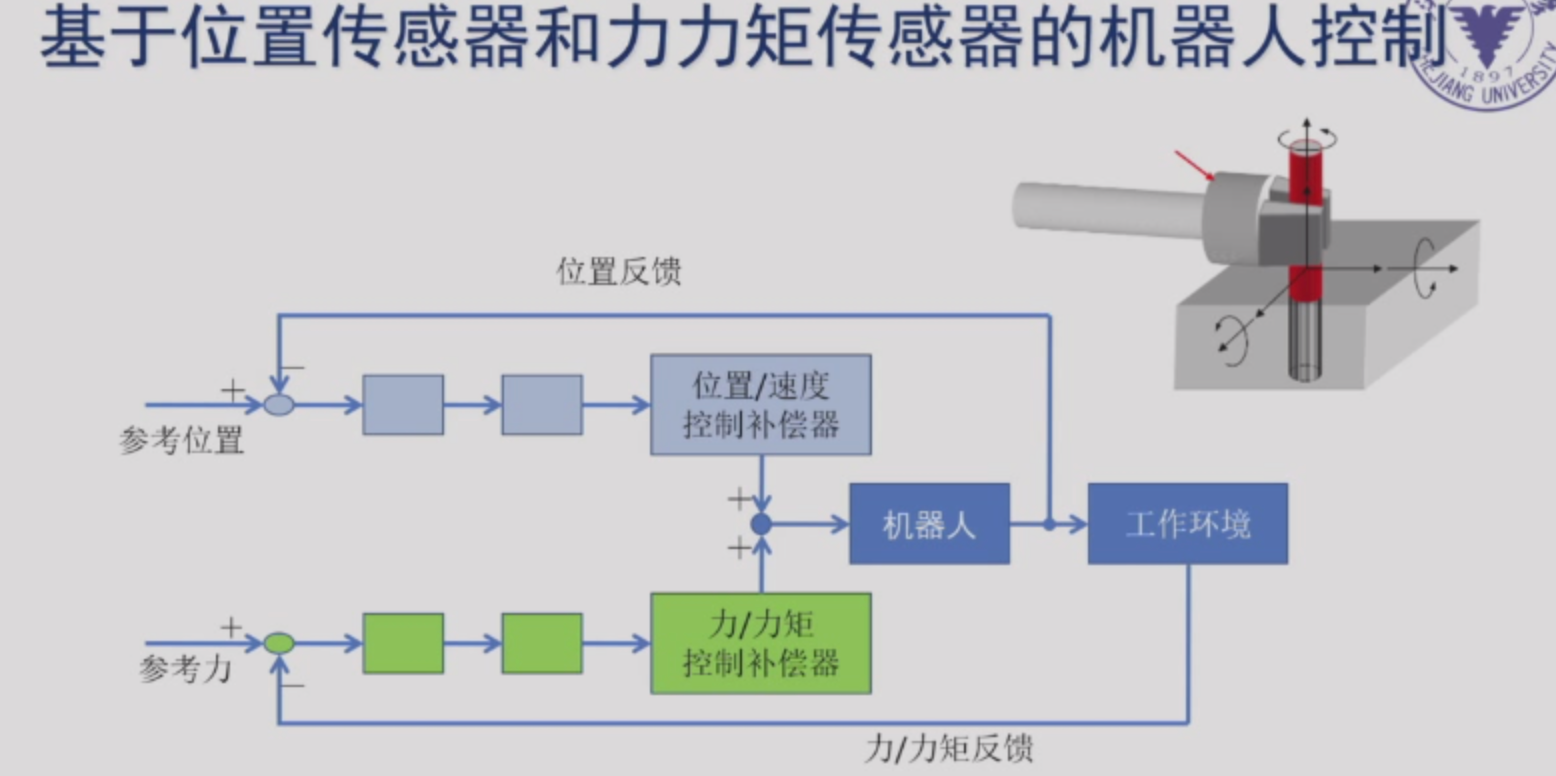
力/力矩传感器¶

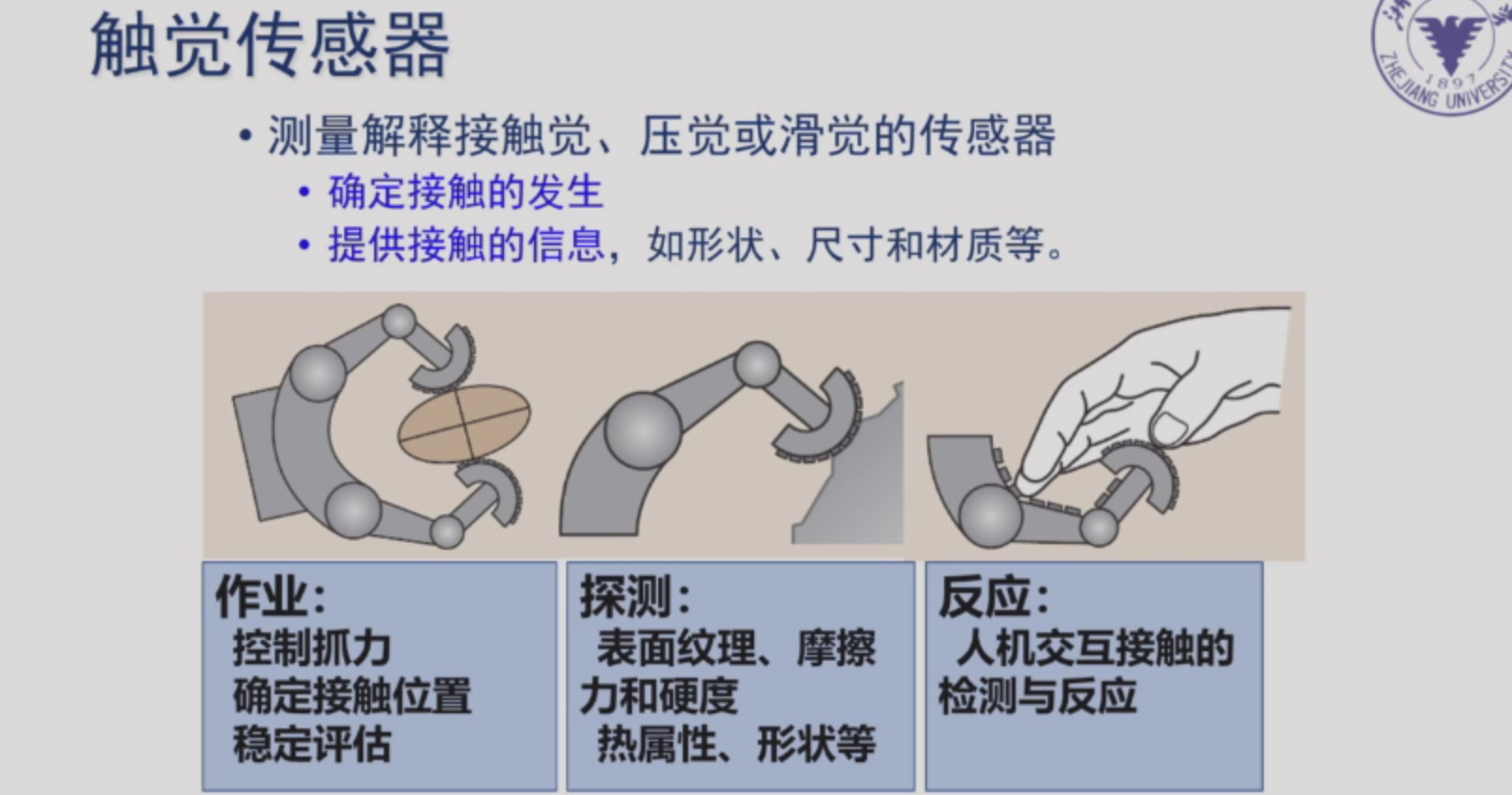
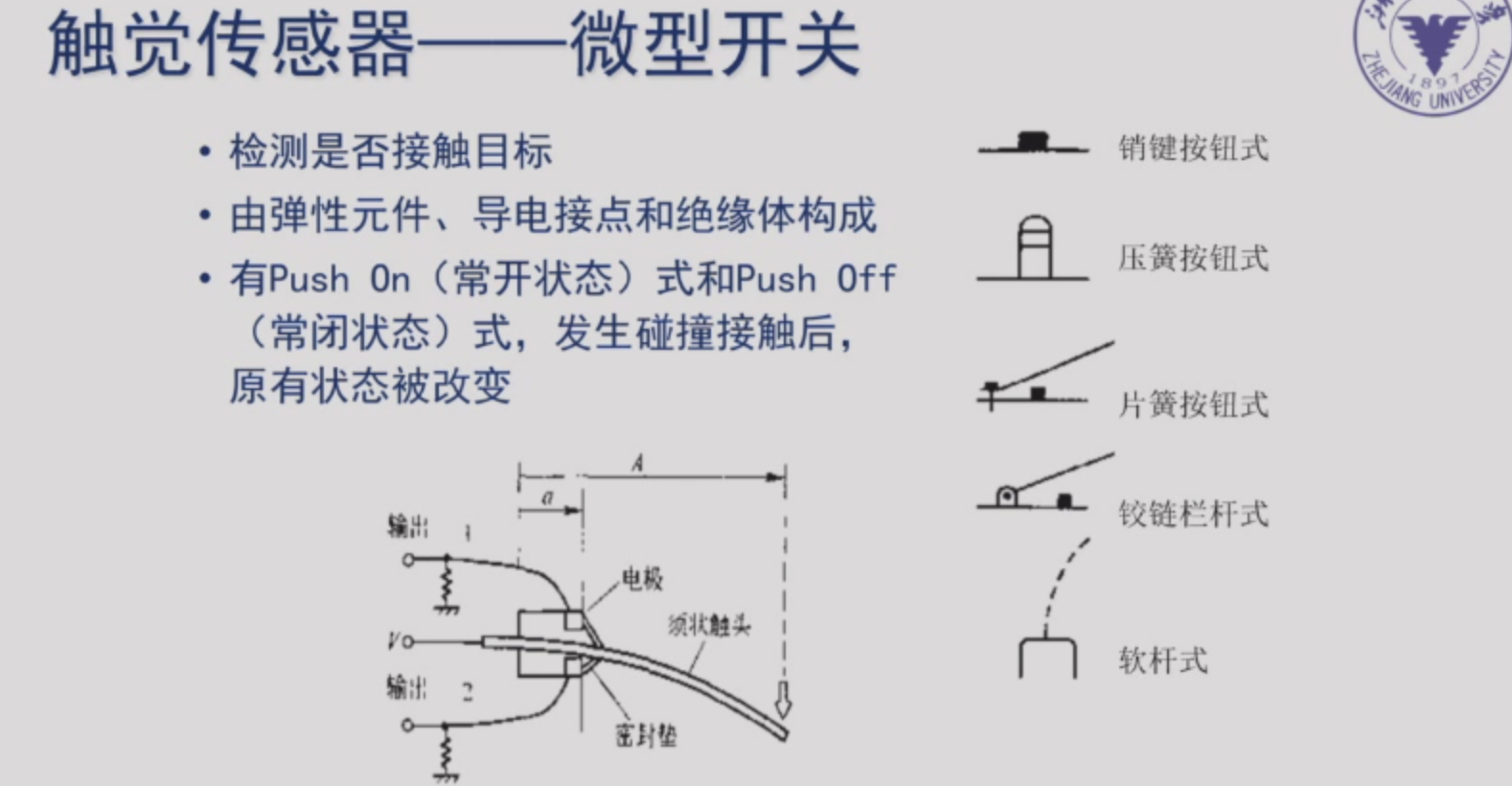
触觉传感器¶
- 人体红外传感器
- 远红外传感器(火焰检测/定位)
- 震动传感器
- 语音识别模块
- 颜色传感器
- 有高强度白光LED在目标表面反射,从反射光中分析的RGB值和强度;
- 气体传感器
- 有点化学、物理吸附、光学;
本文总阅读量次