第六章 信息安全中的毫米波感知¶
约 507 个字 82 张图片 预计阅读时间 2 分钟
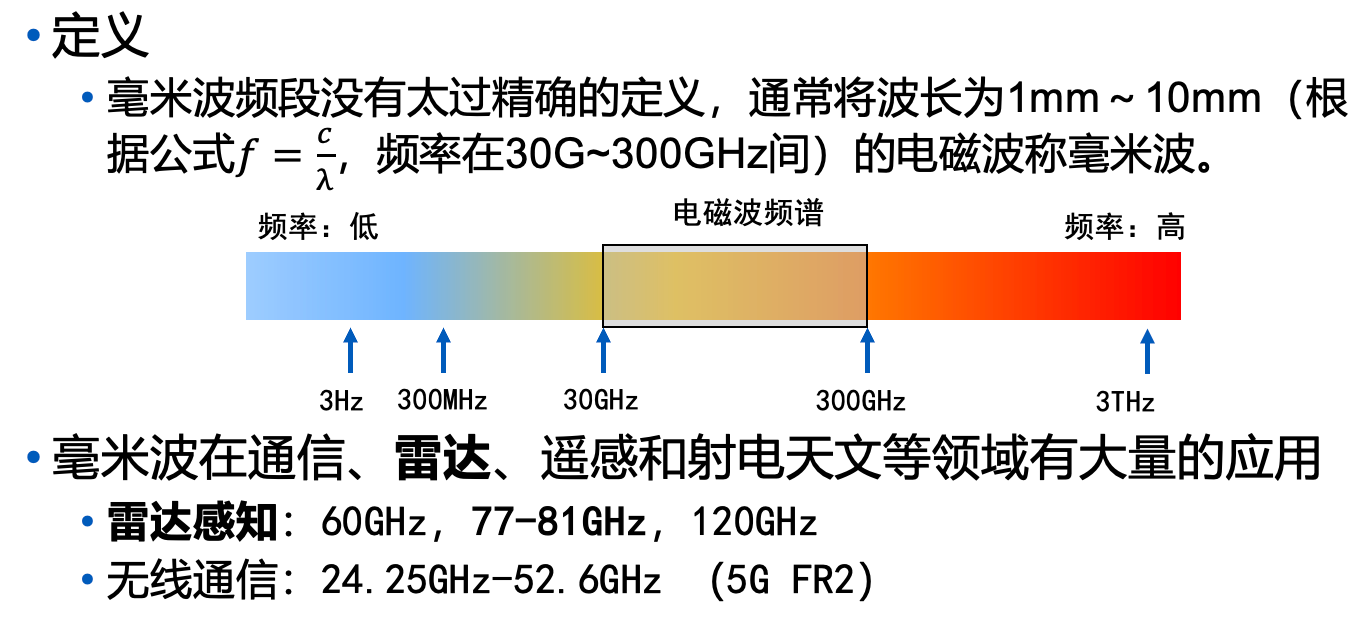
1. 毫米波简介¶
定义及应用¶
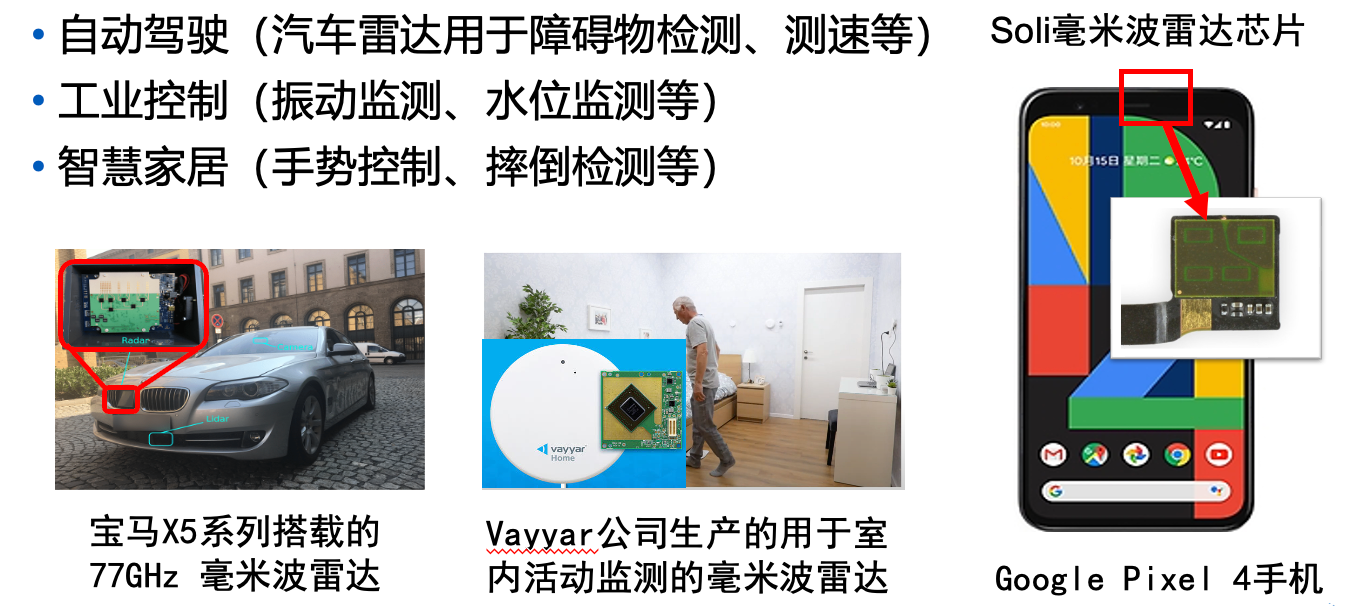
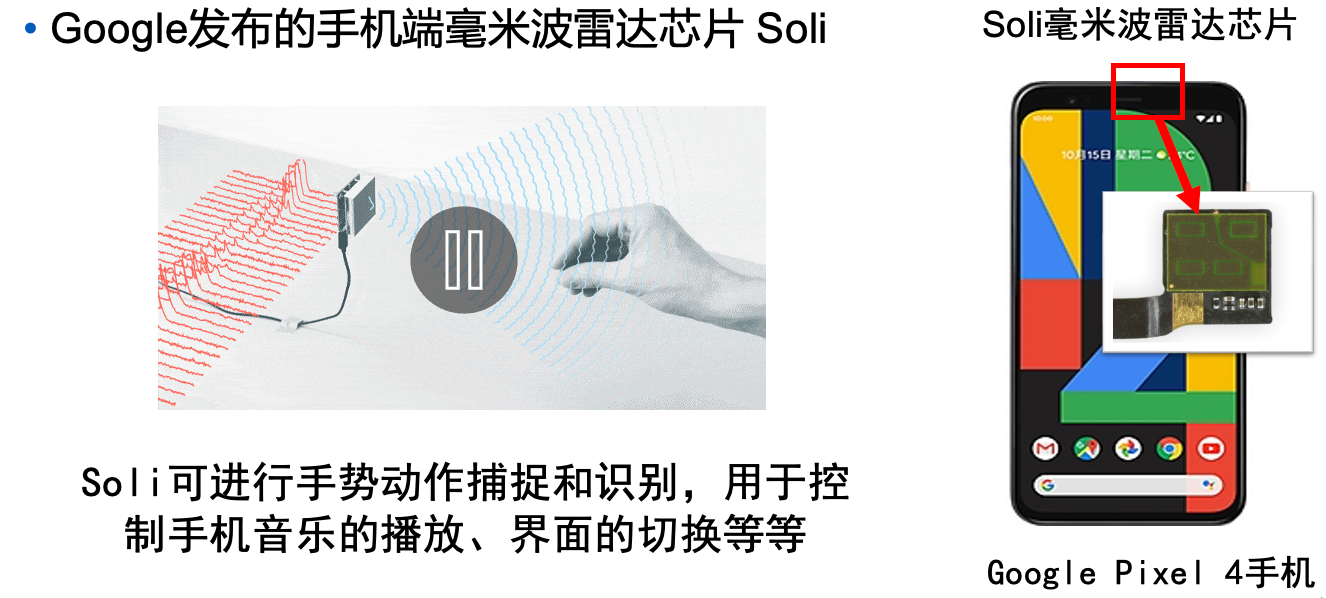
毫米波雷达¶
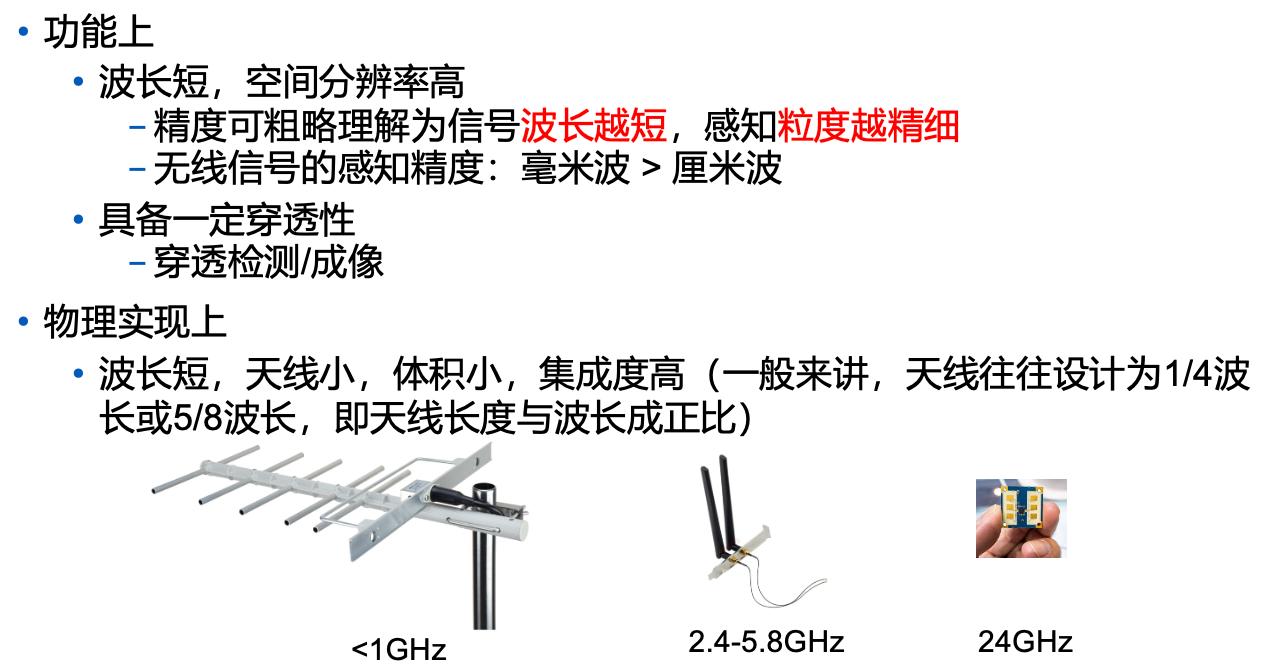
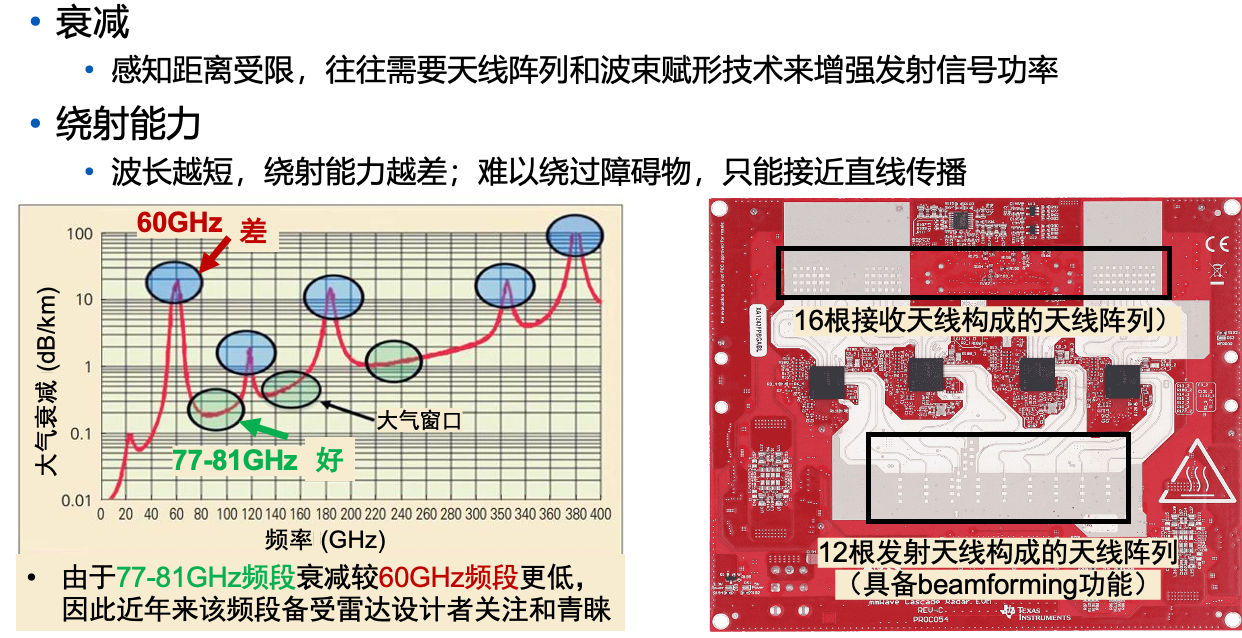
优势¶
缺陷¶
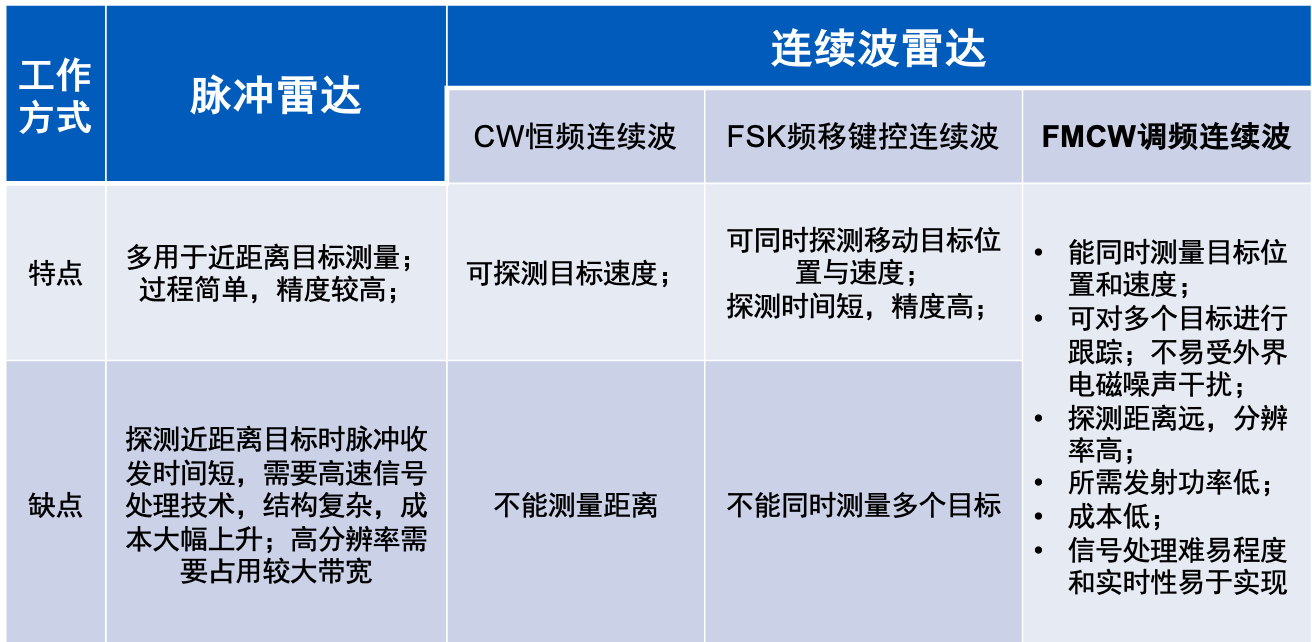
工作模式¶
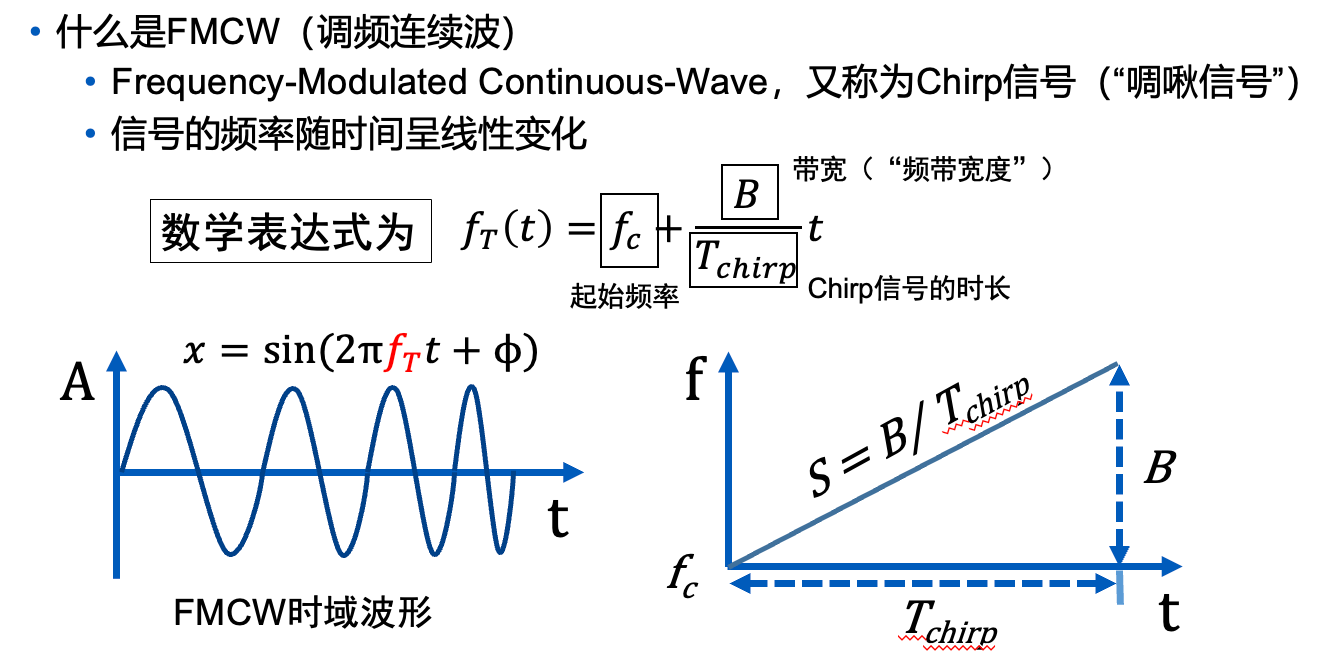
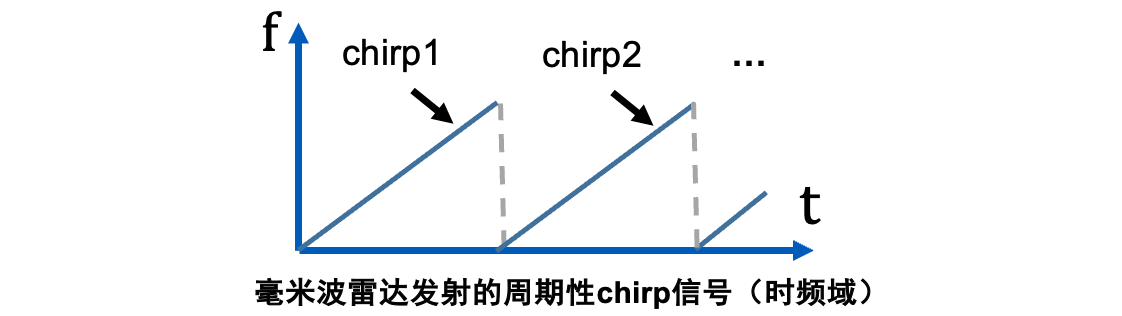
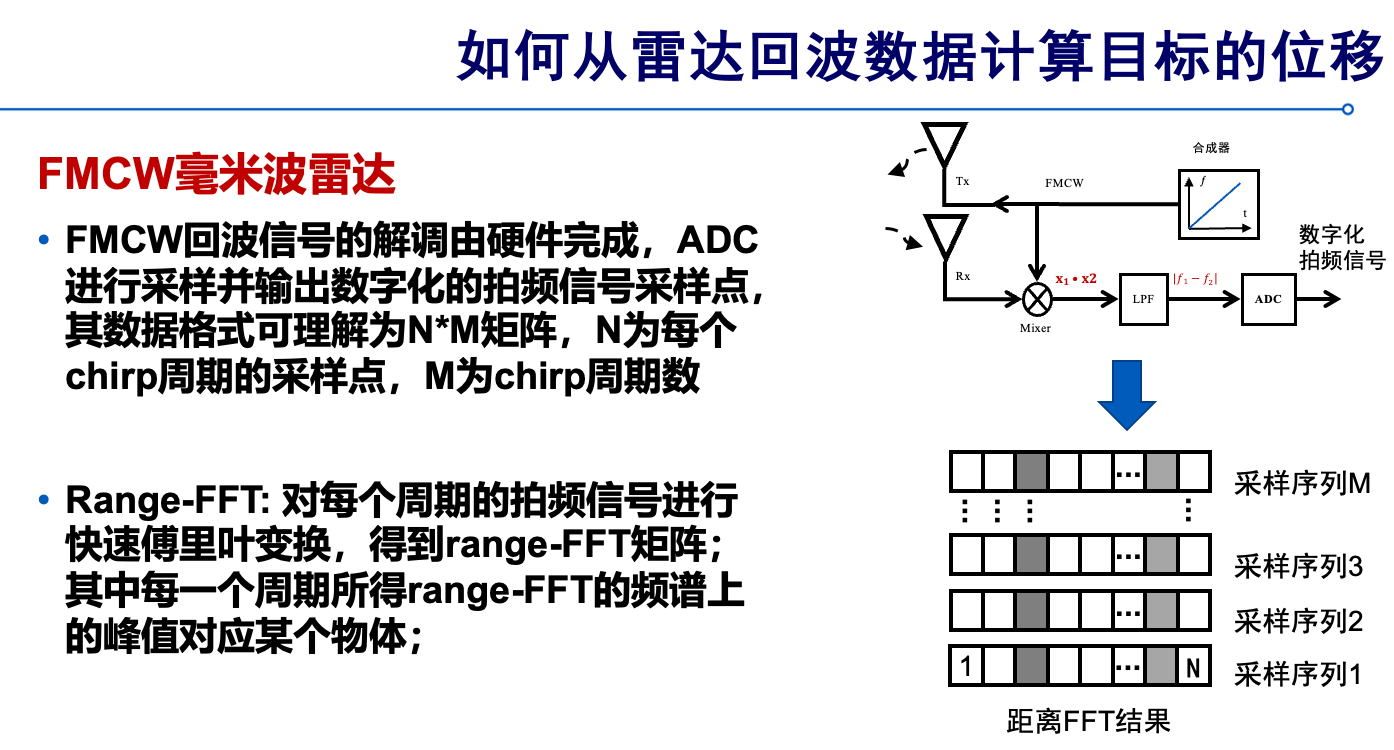
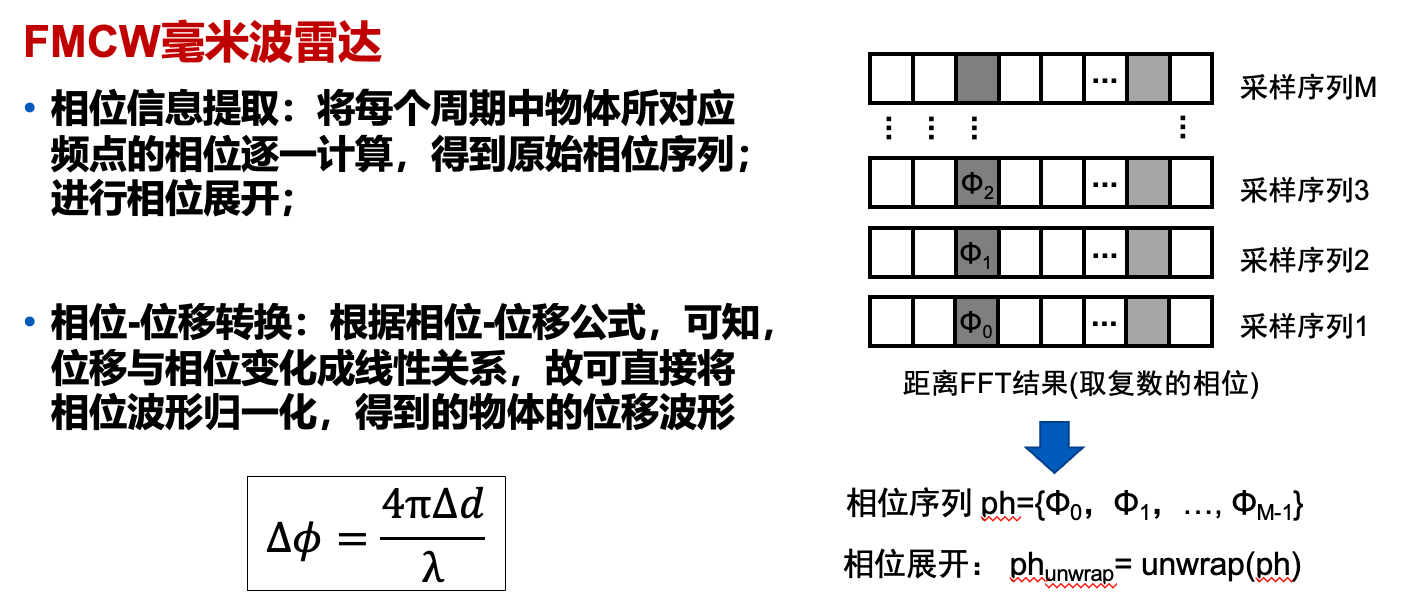
FMCW毫米波雷达¶
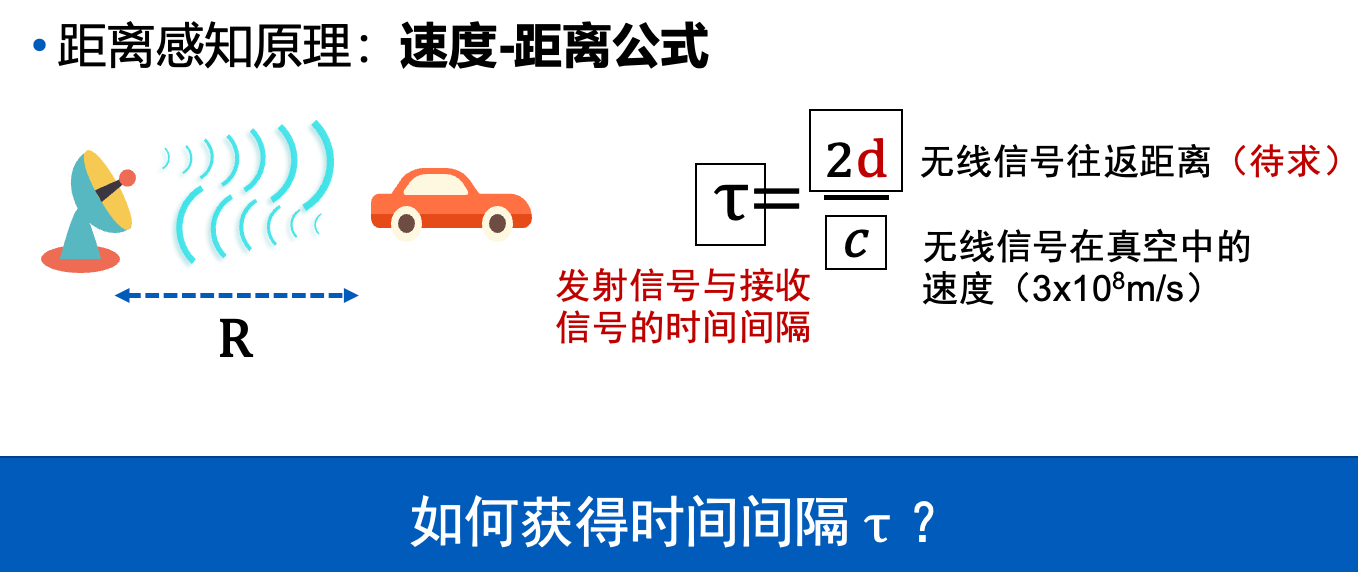
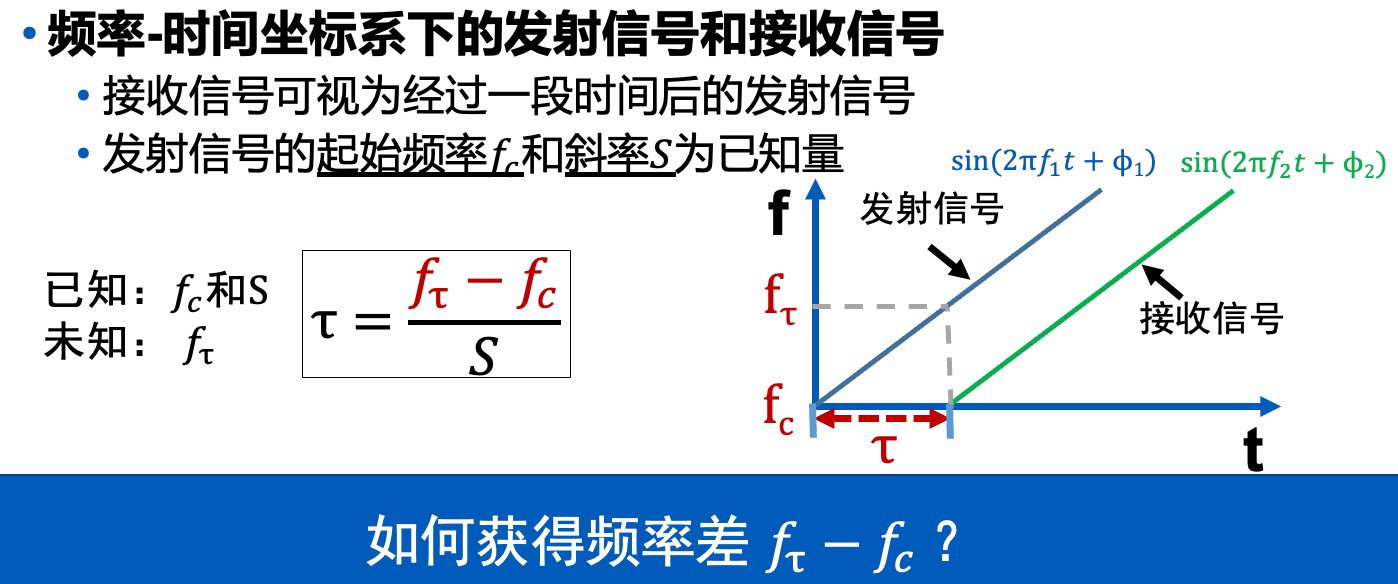
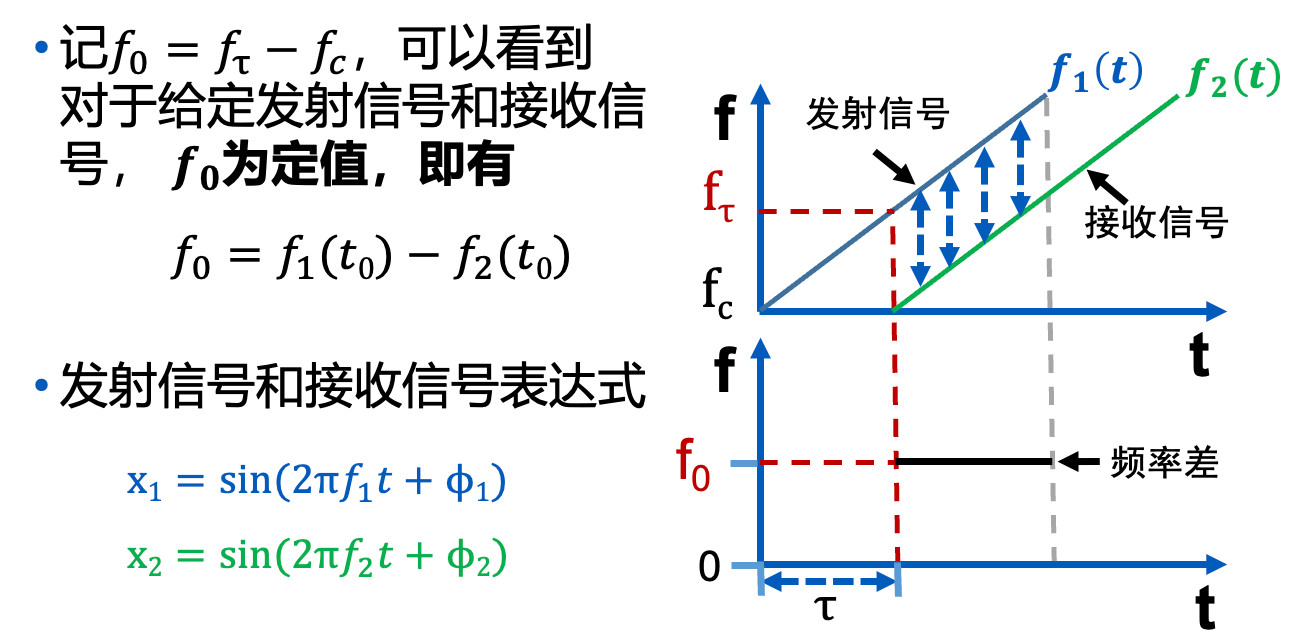
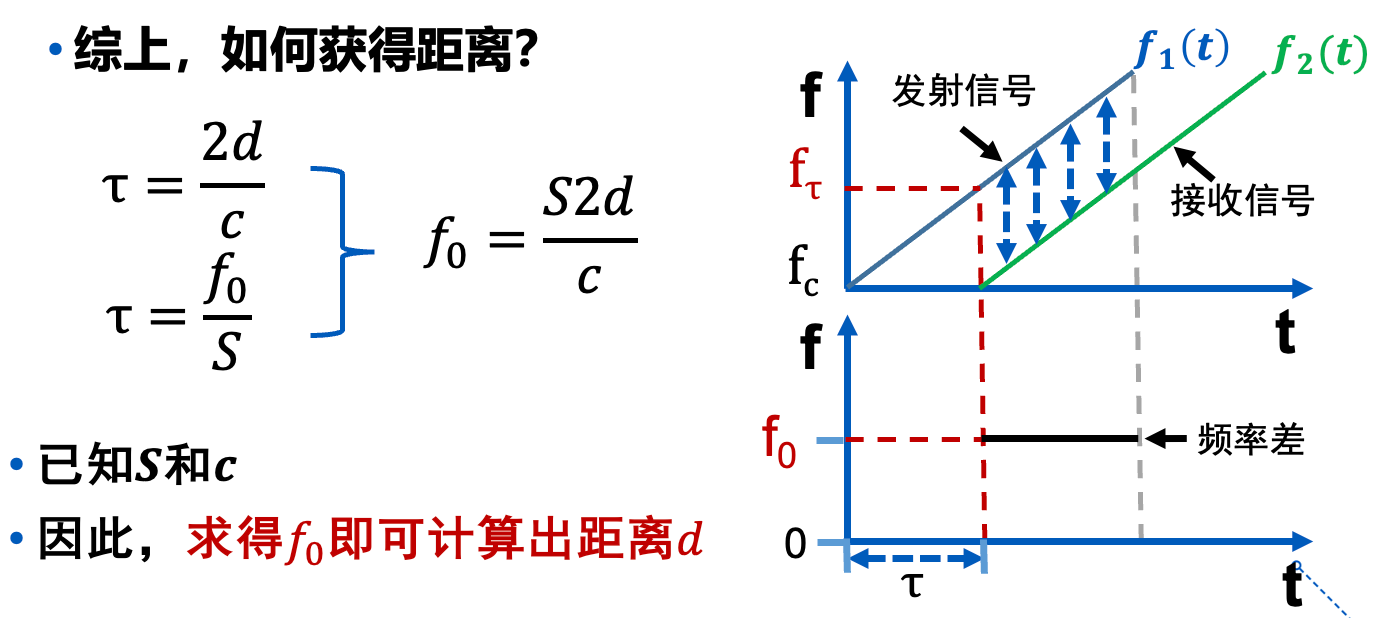
FMCW毫米波雷达的距离感知¶

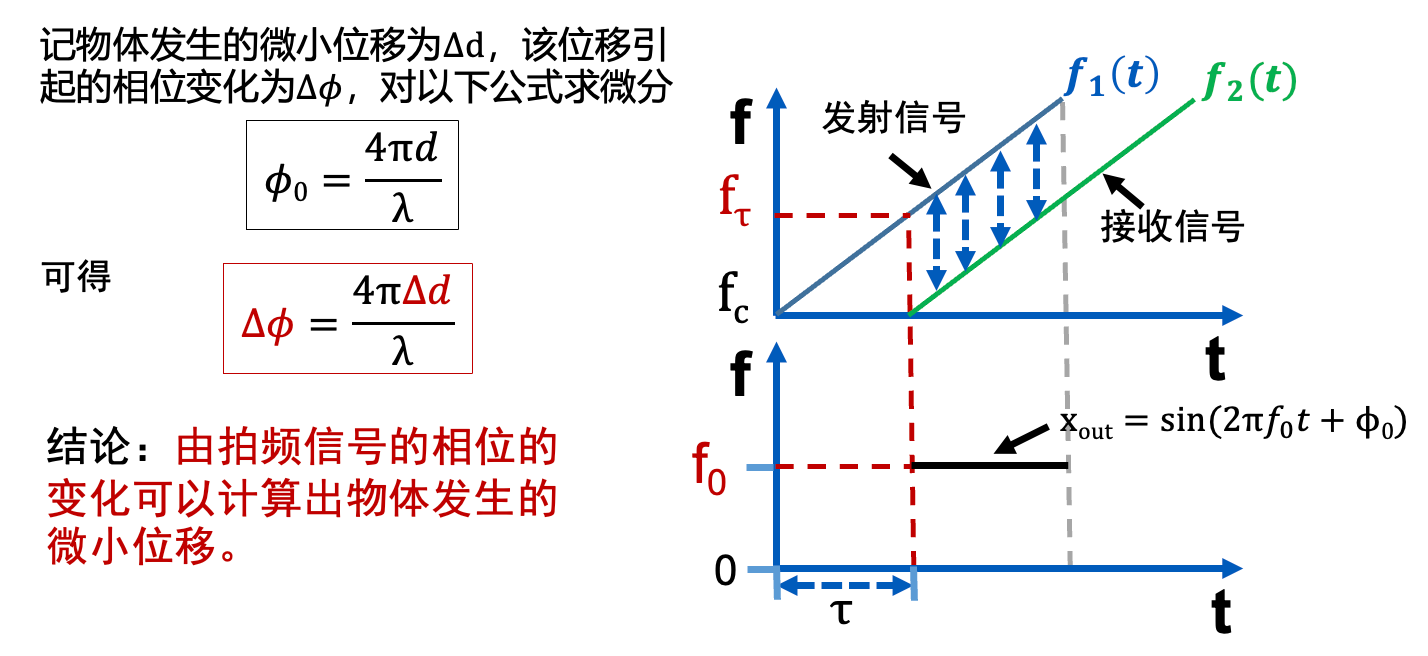
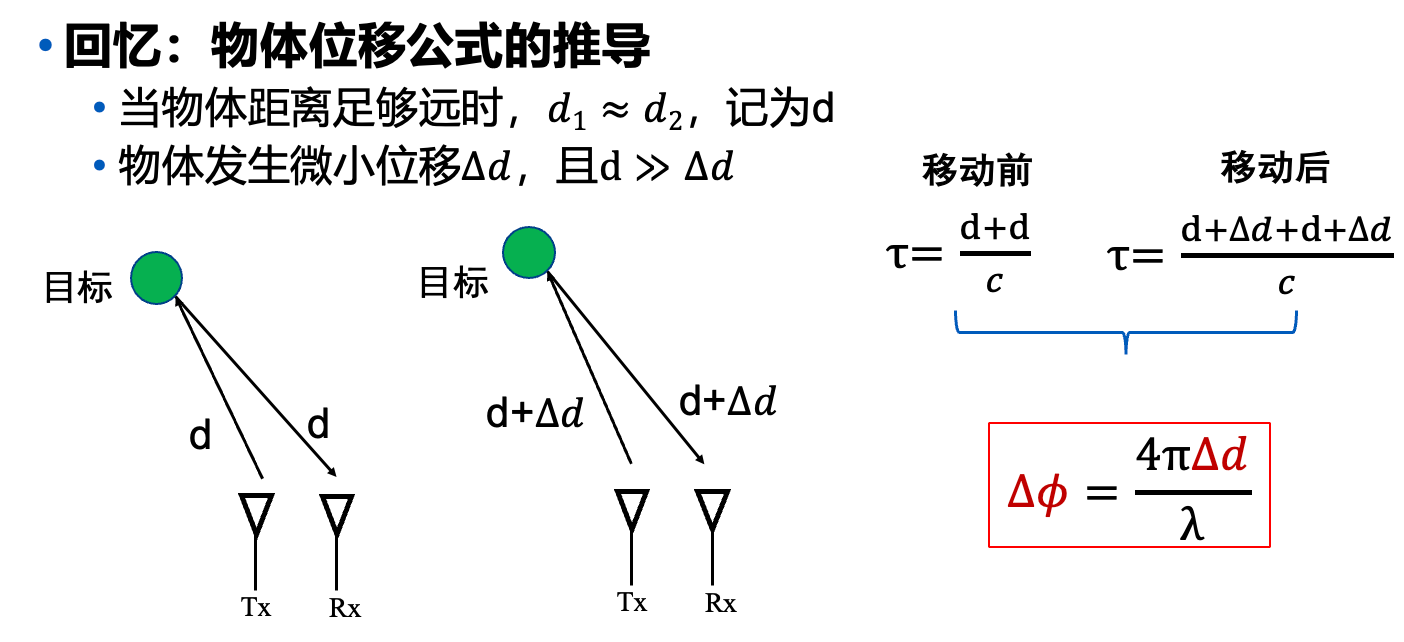
FMCW毫米波雷达的位移感知¶
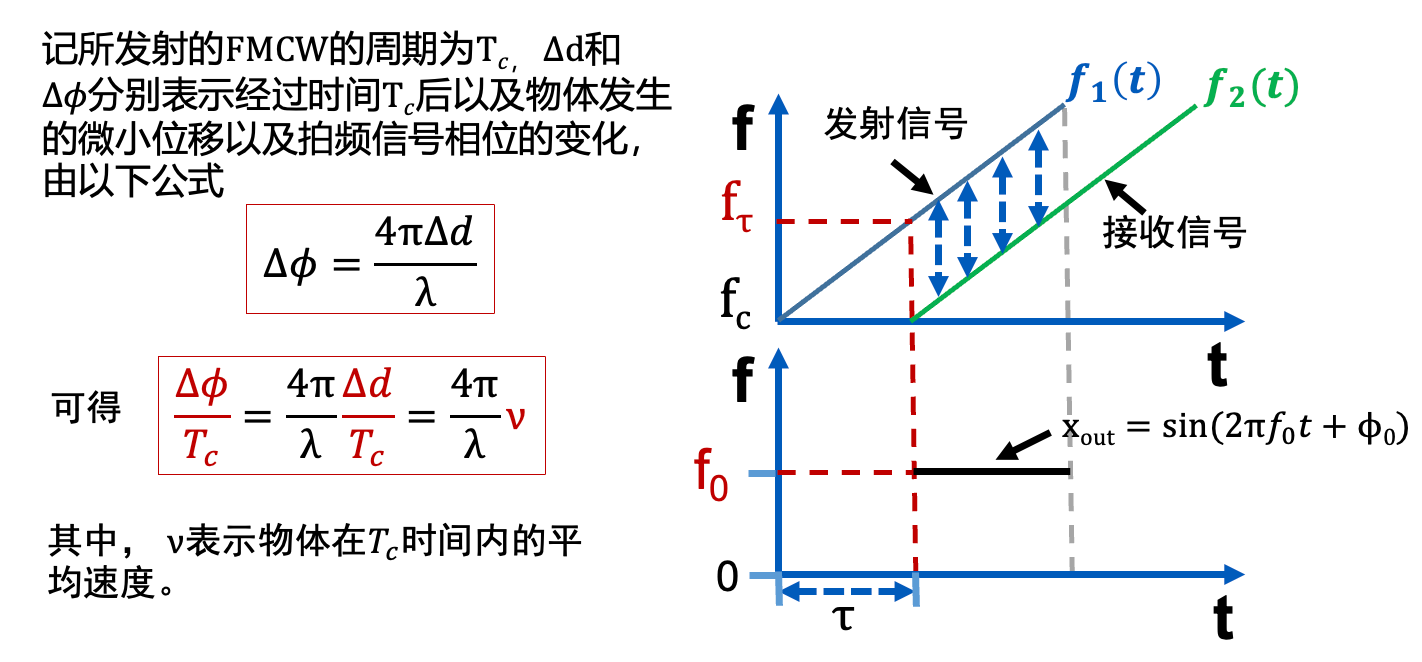
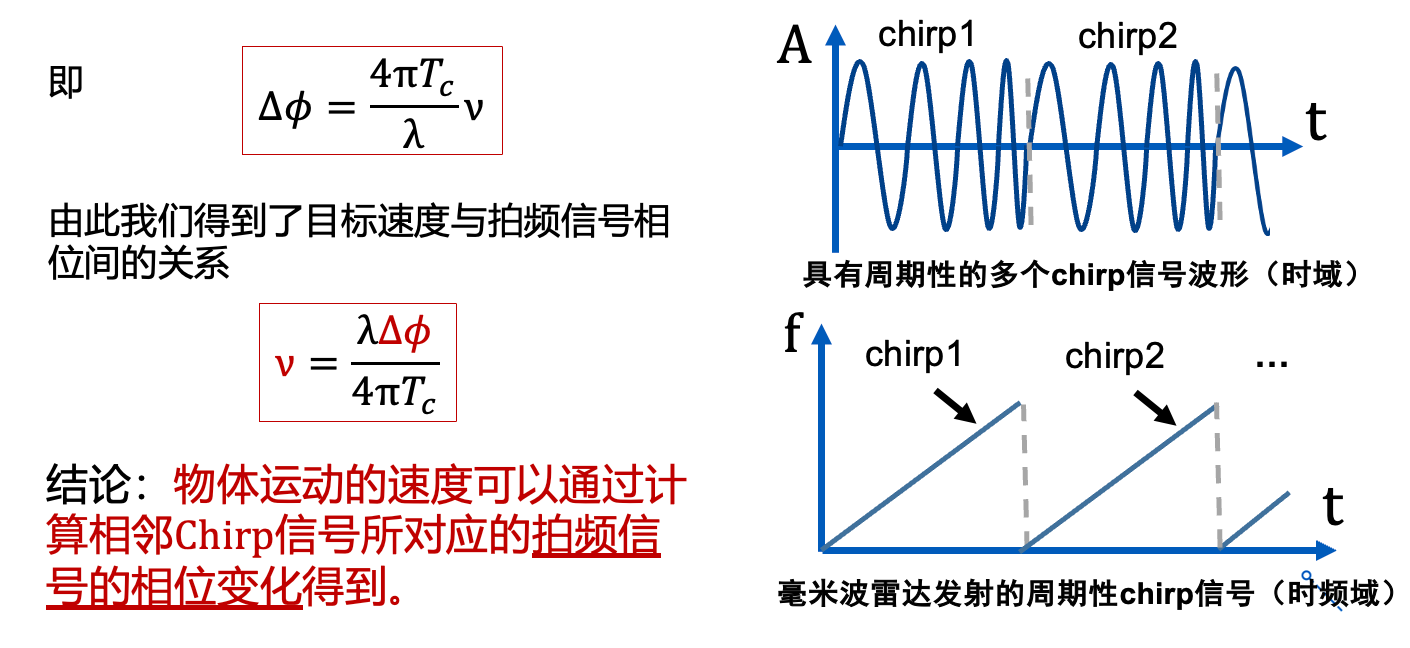
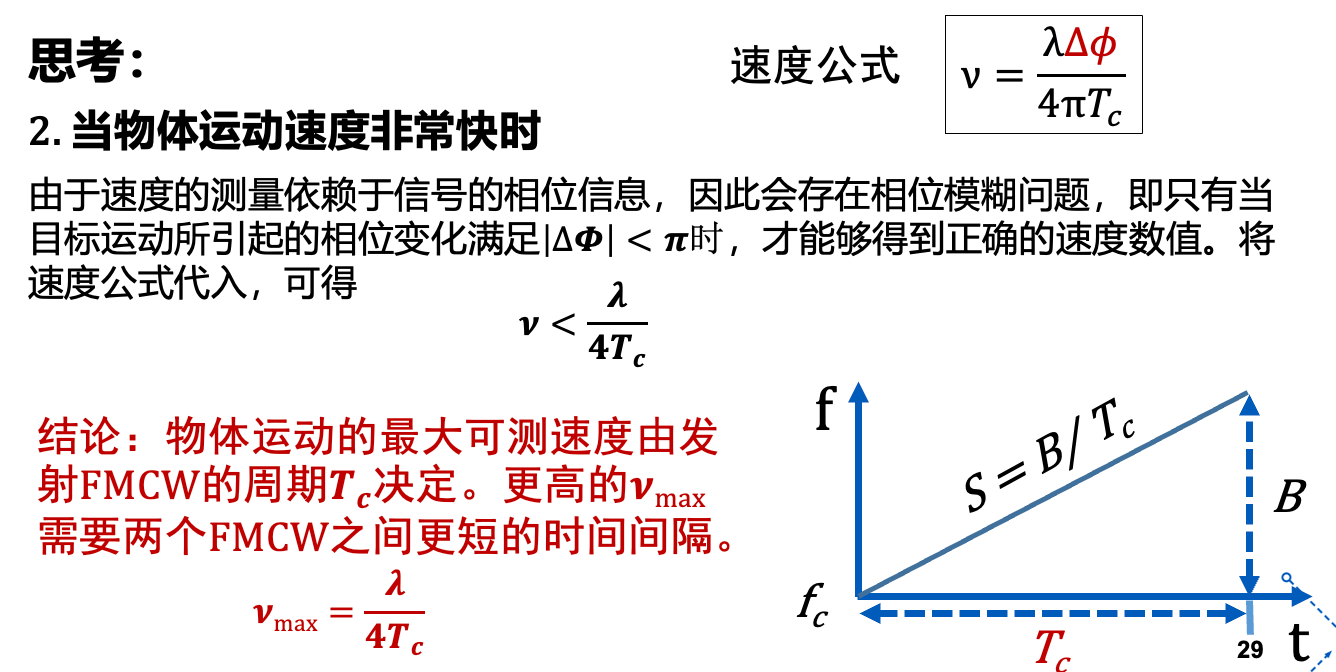
FMCW毫米波雷达的速度感知¶
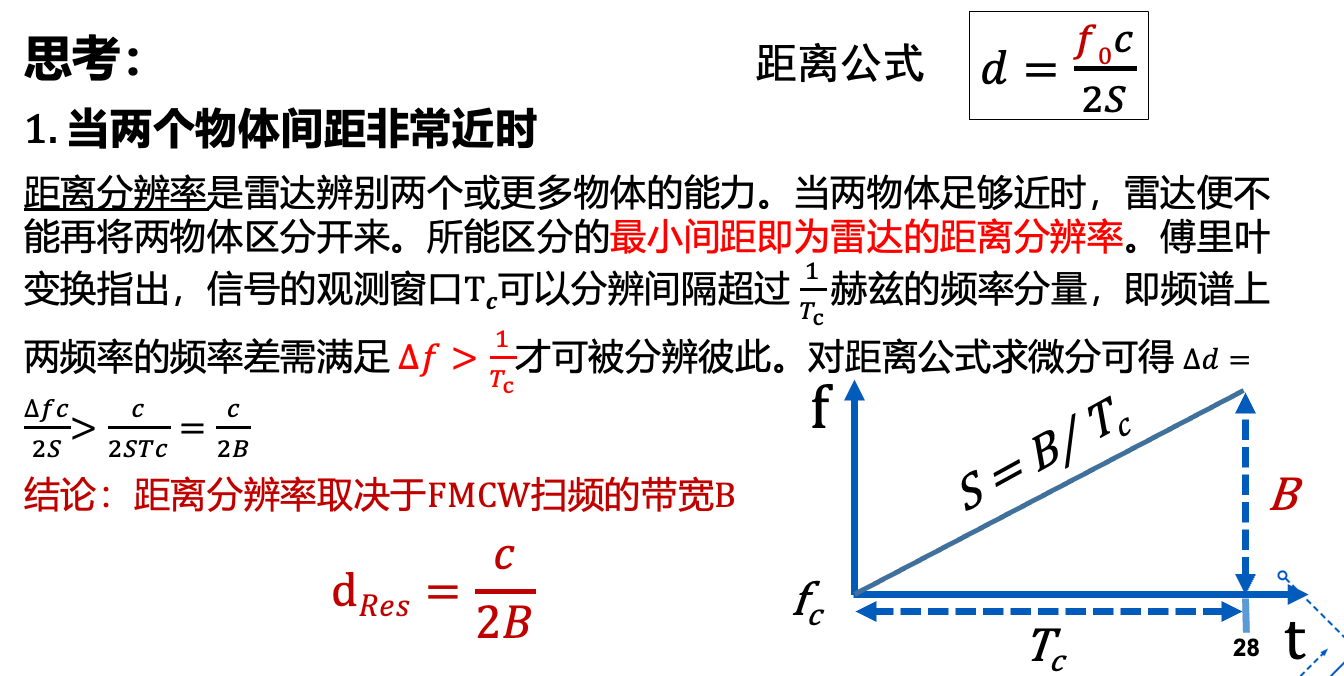
雷达距离感知的分辨率¶
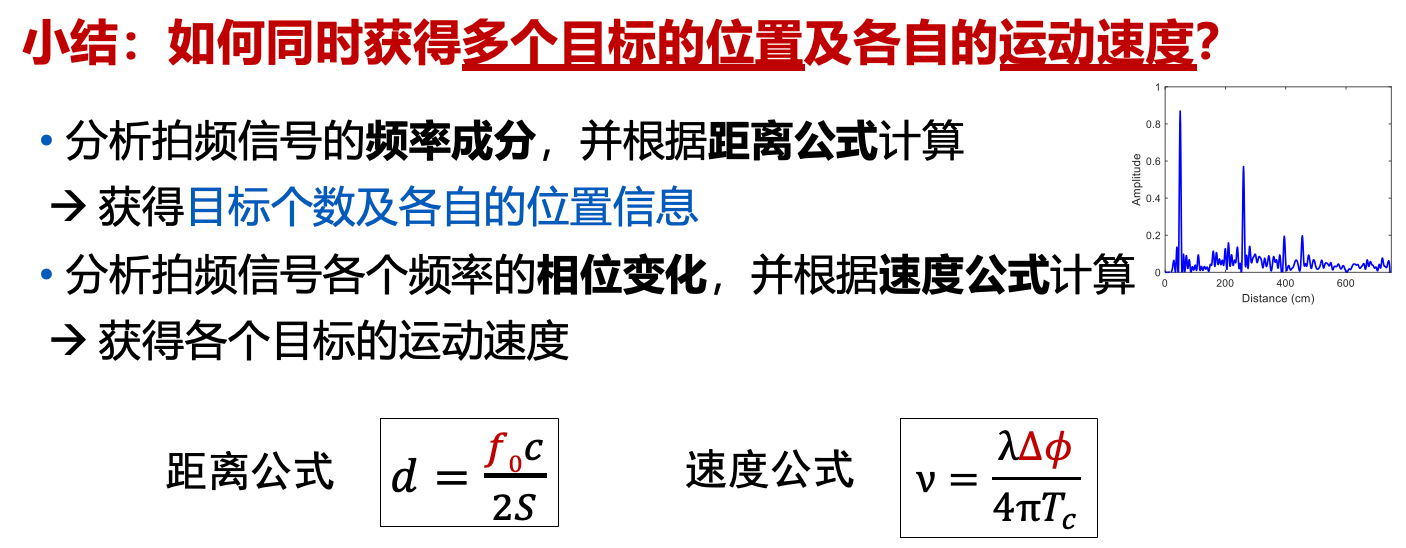
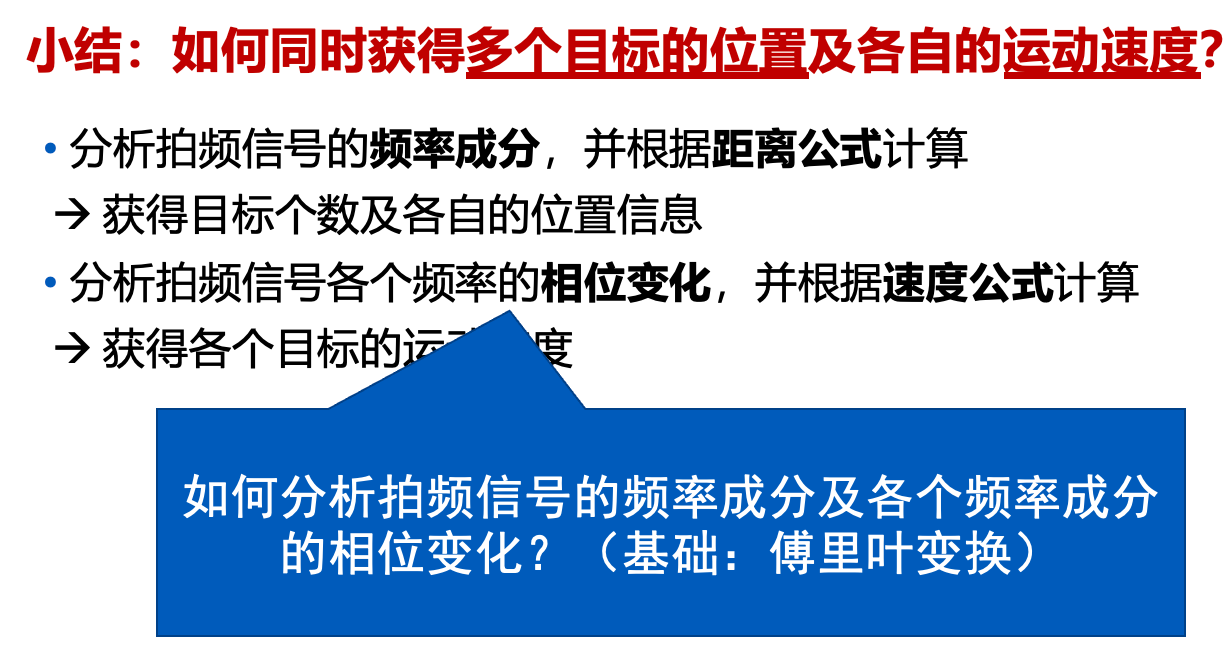
FMCW毫米波雷达感知小节¶
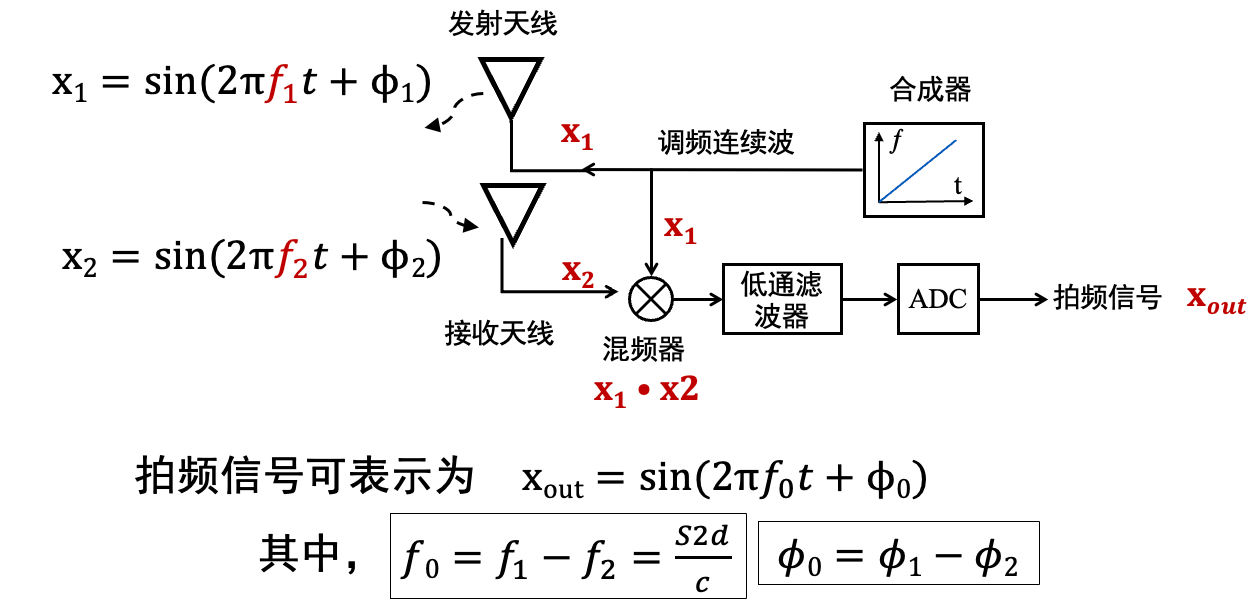
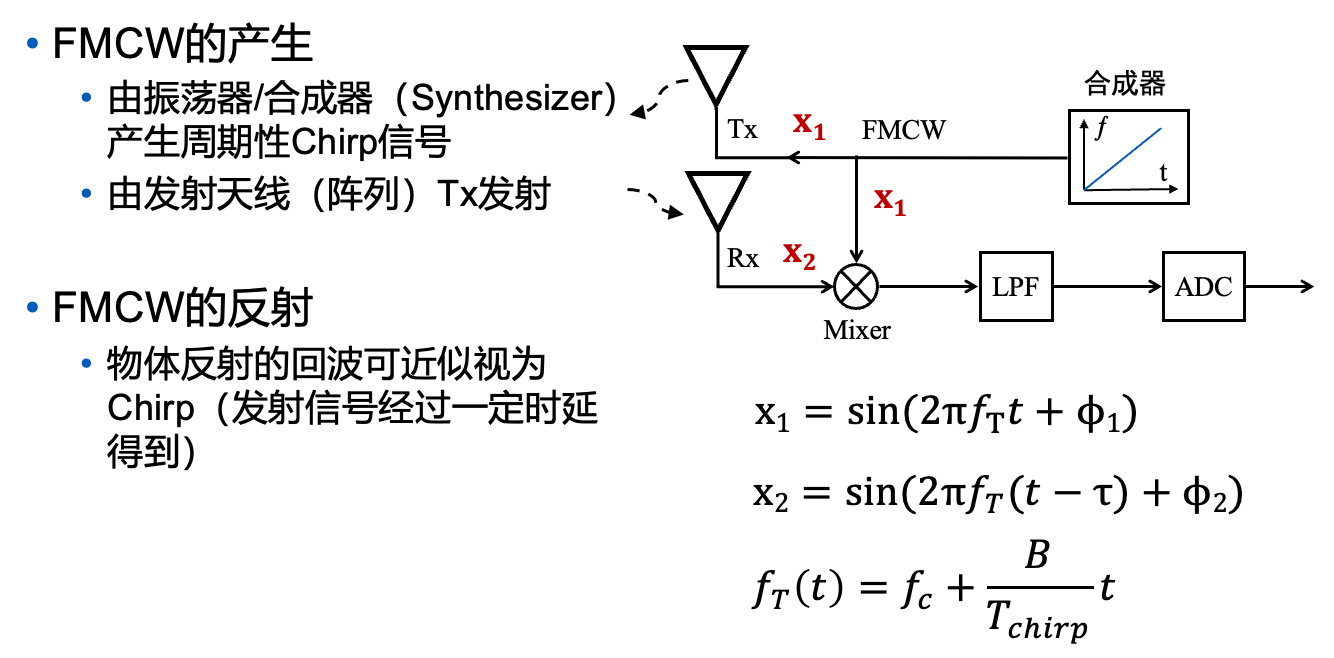
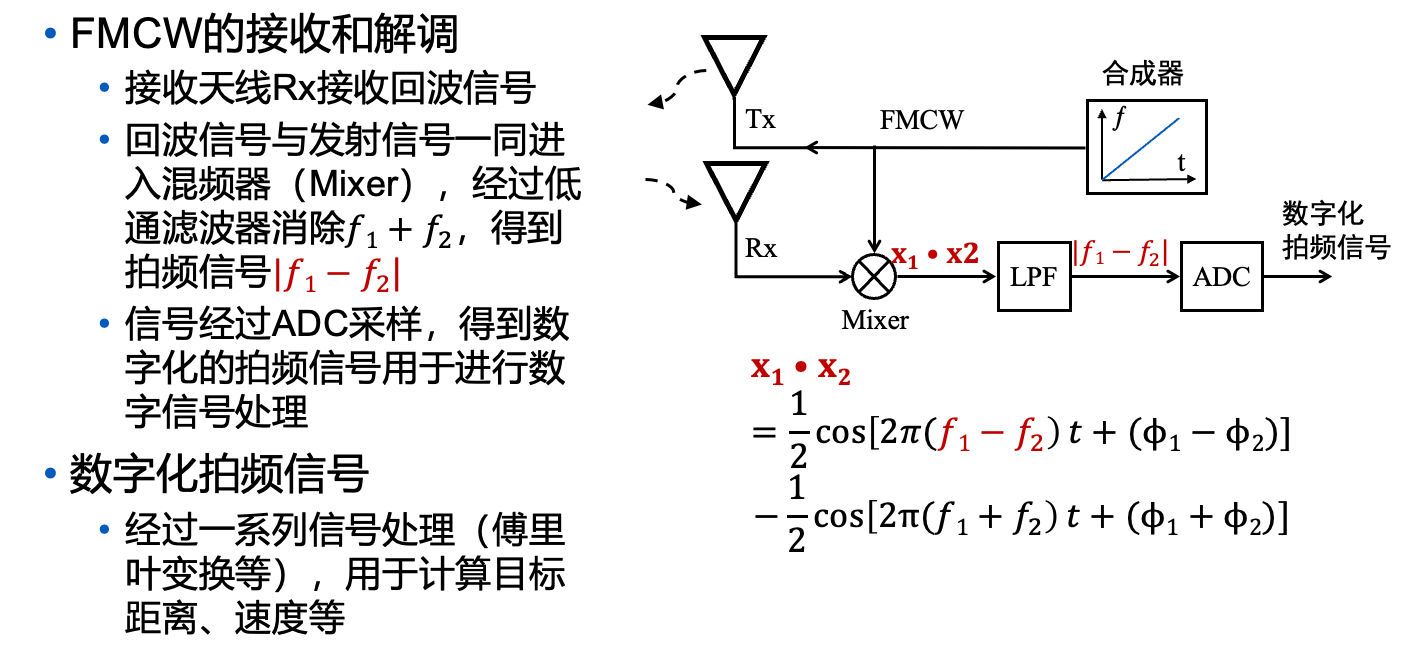
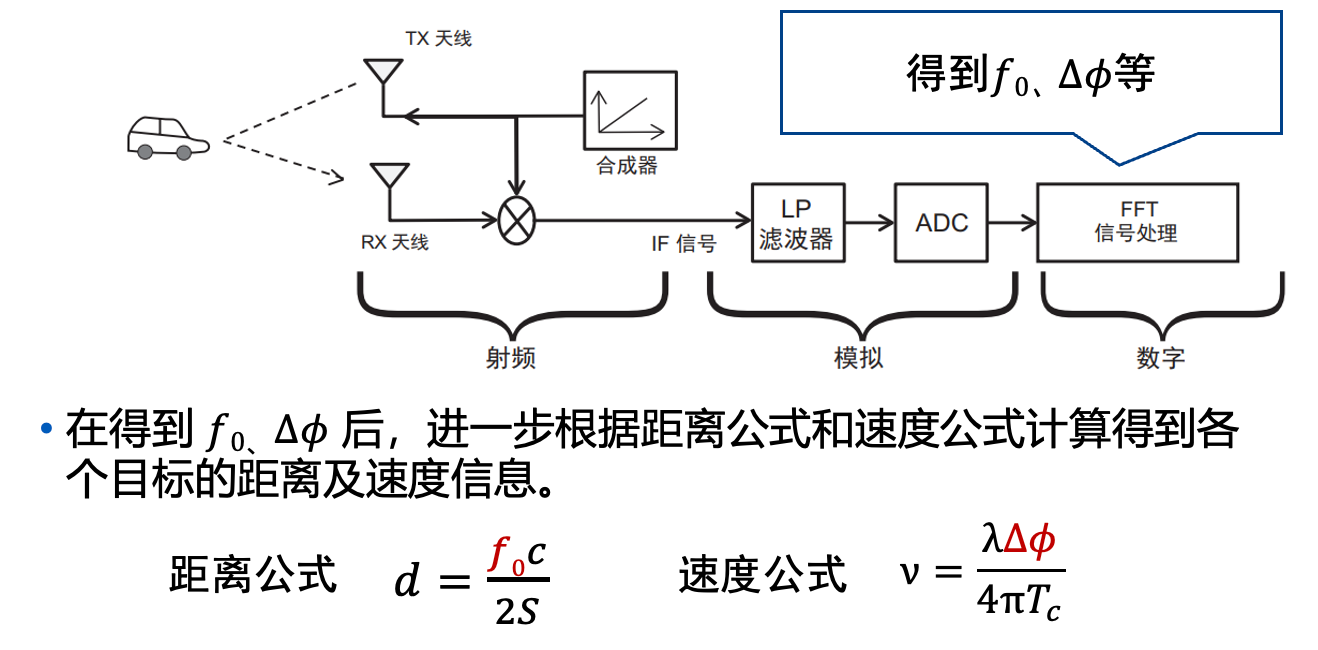
距离和速度感知的硬件实现¶
2. 毫米波雷达信号处理基础¶
距离和速度感知¶
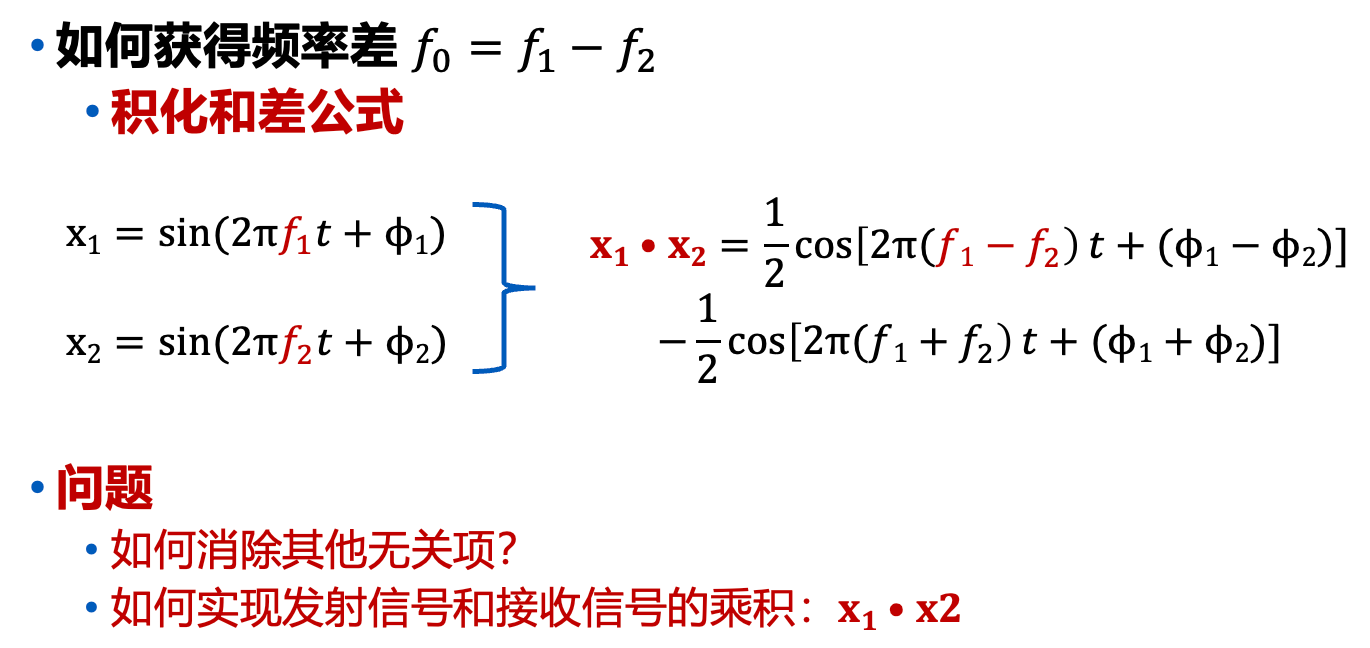
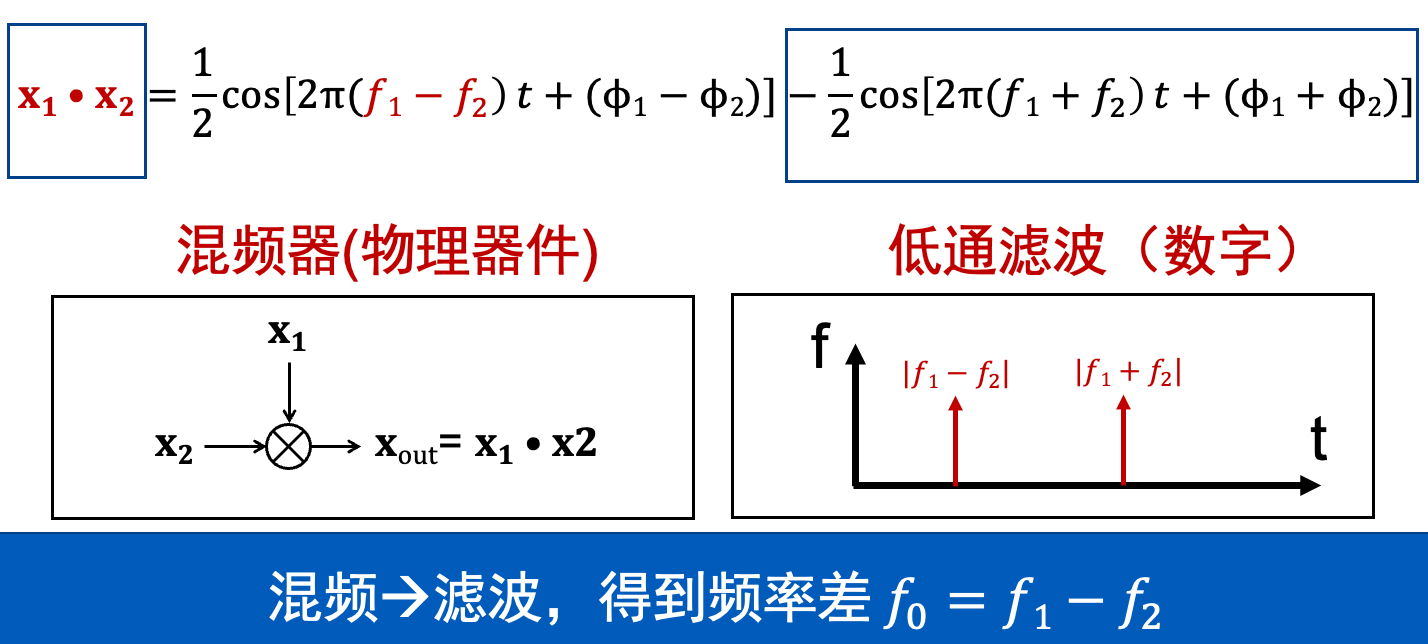
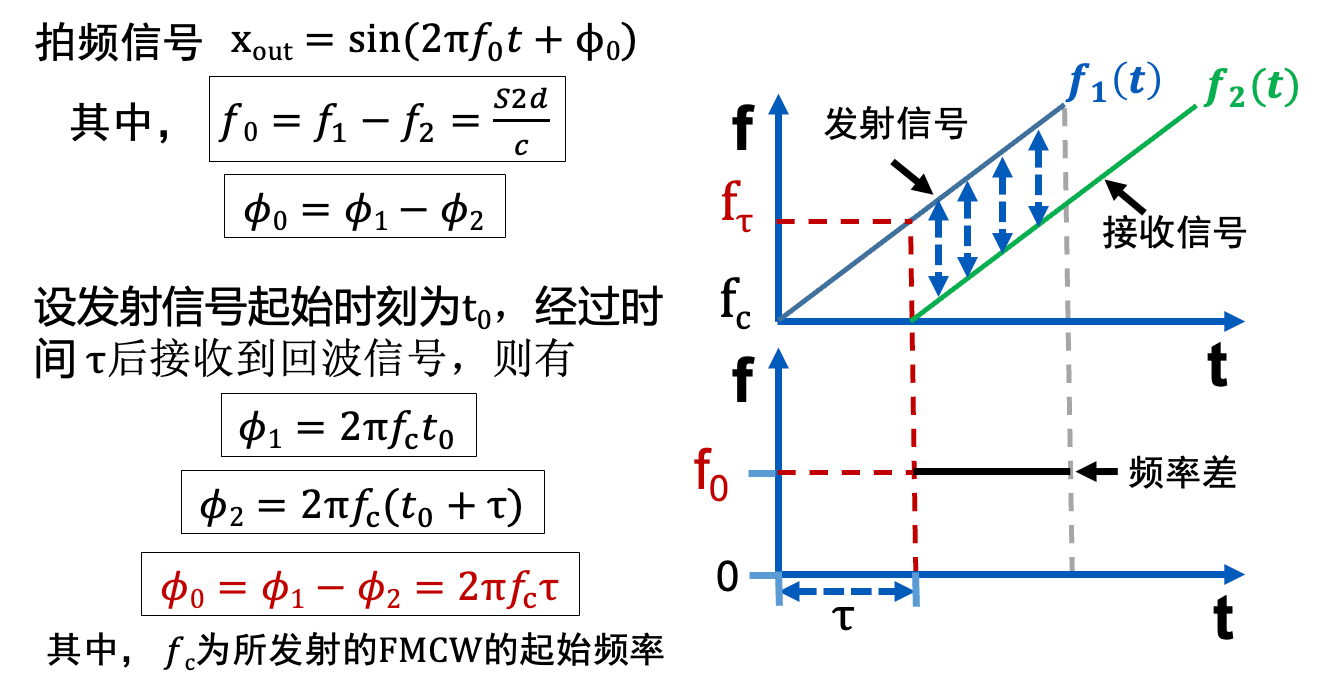
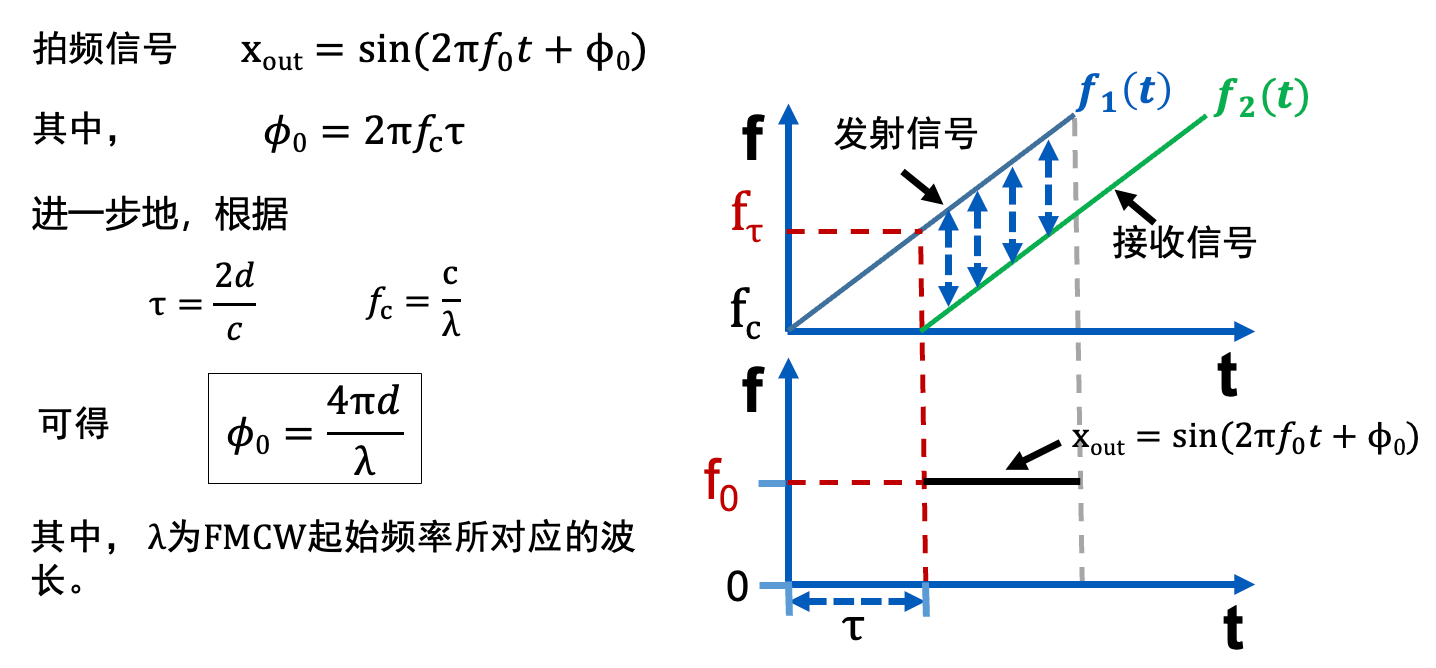
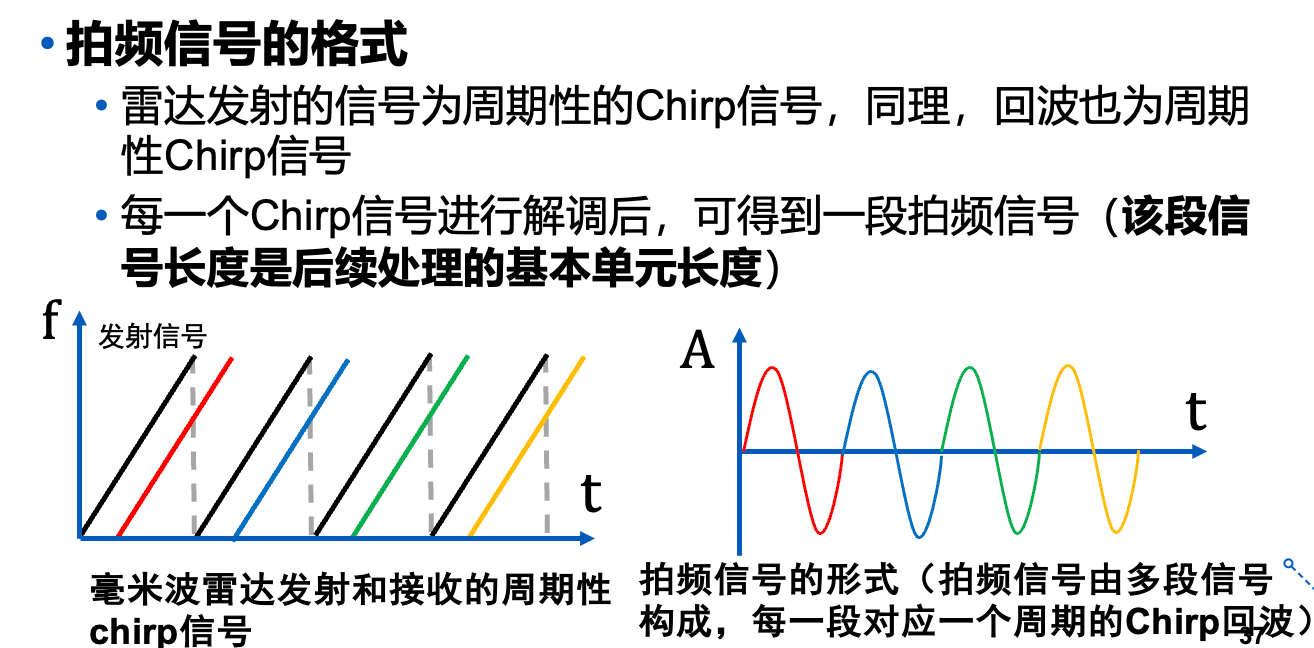
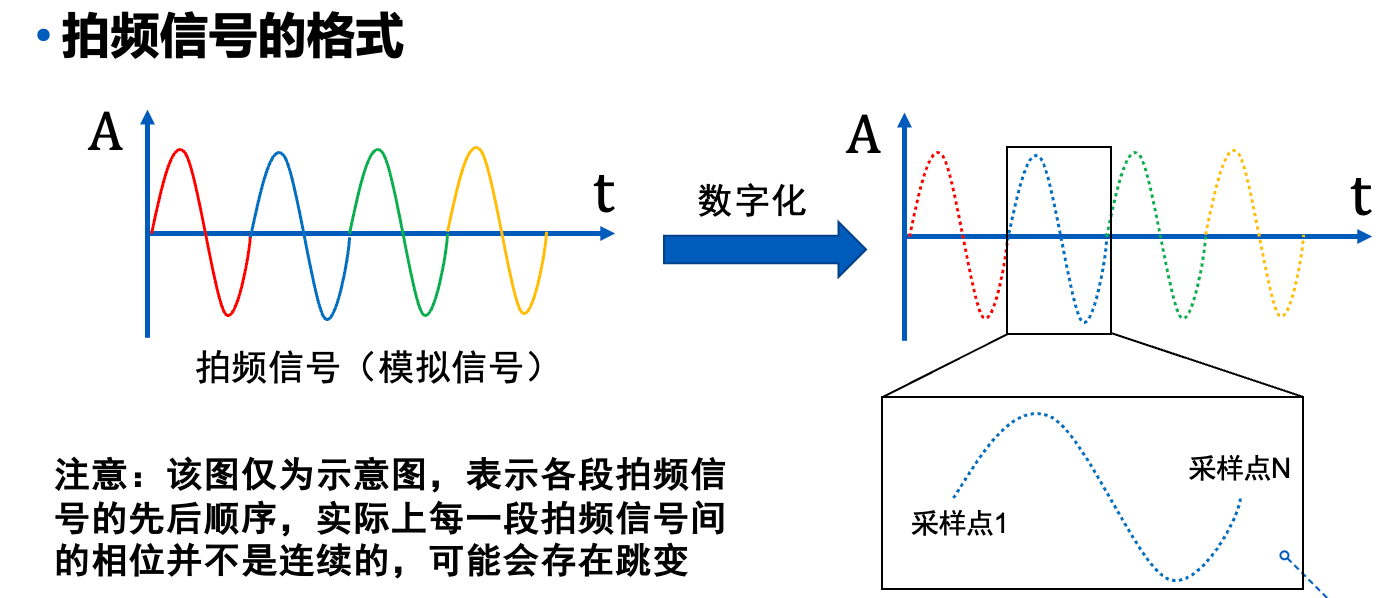
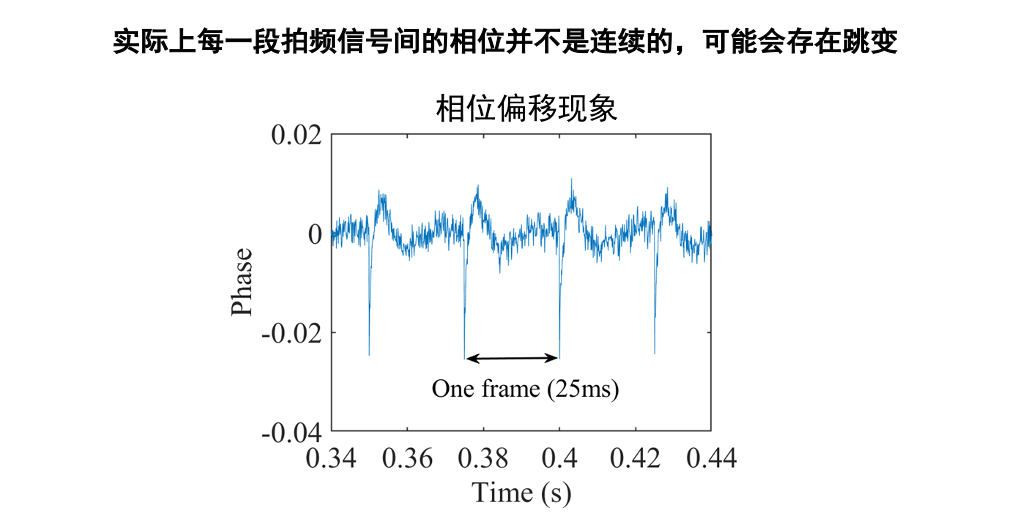
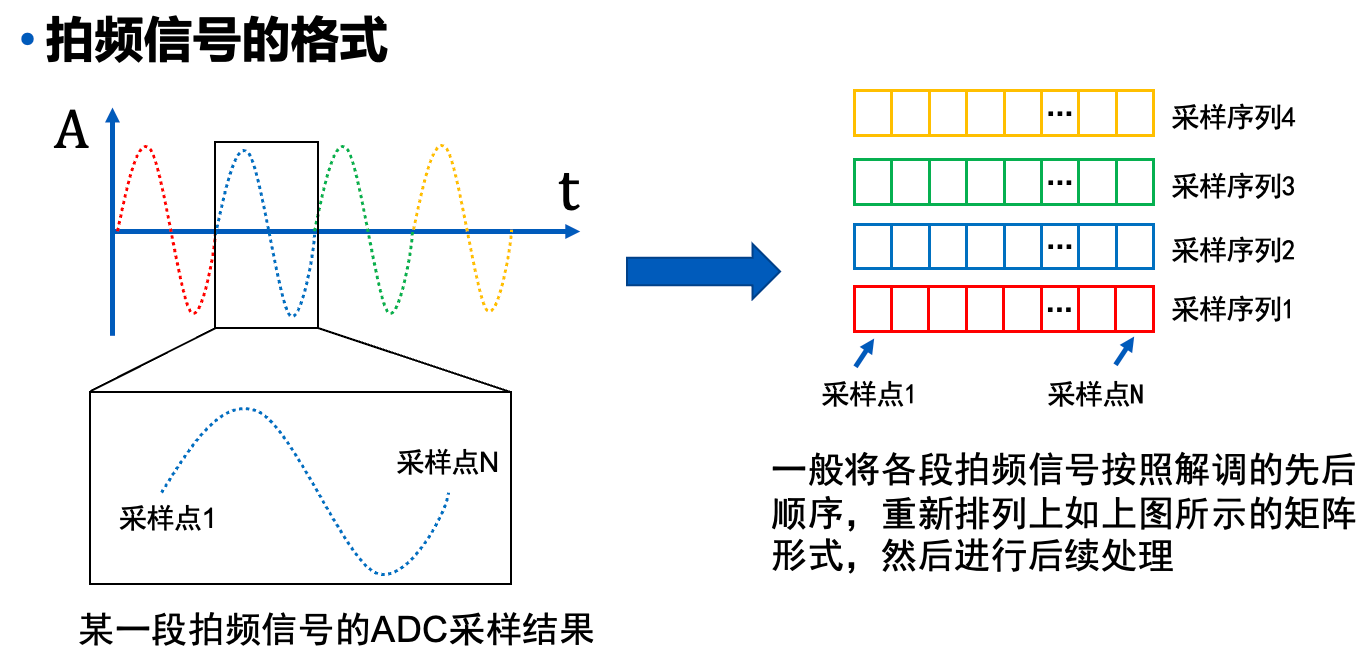
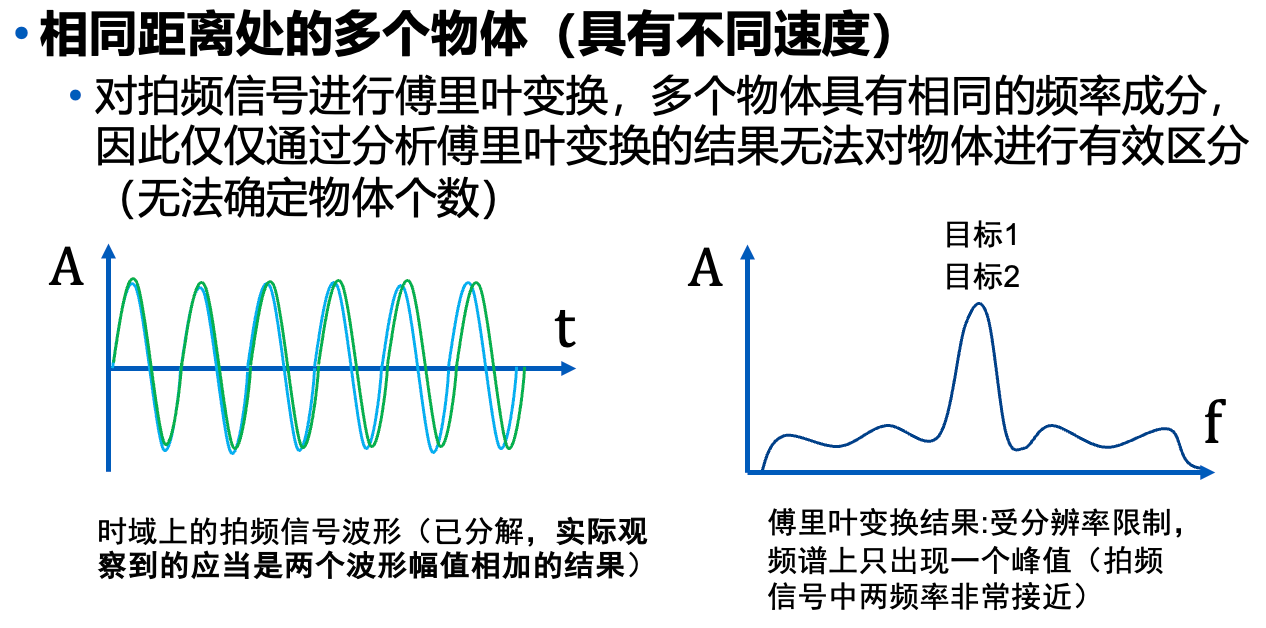
拍频信号¶
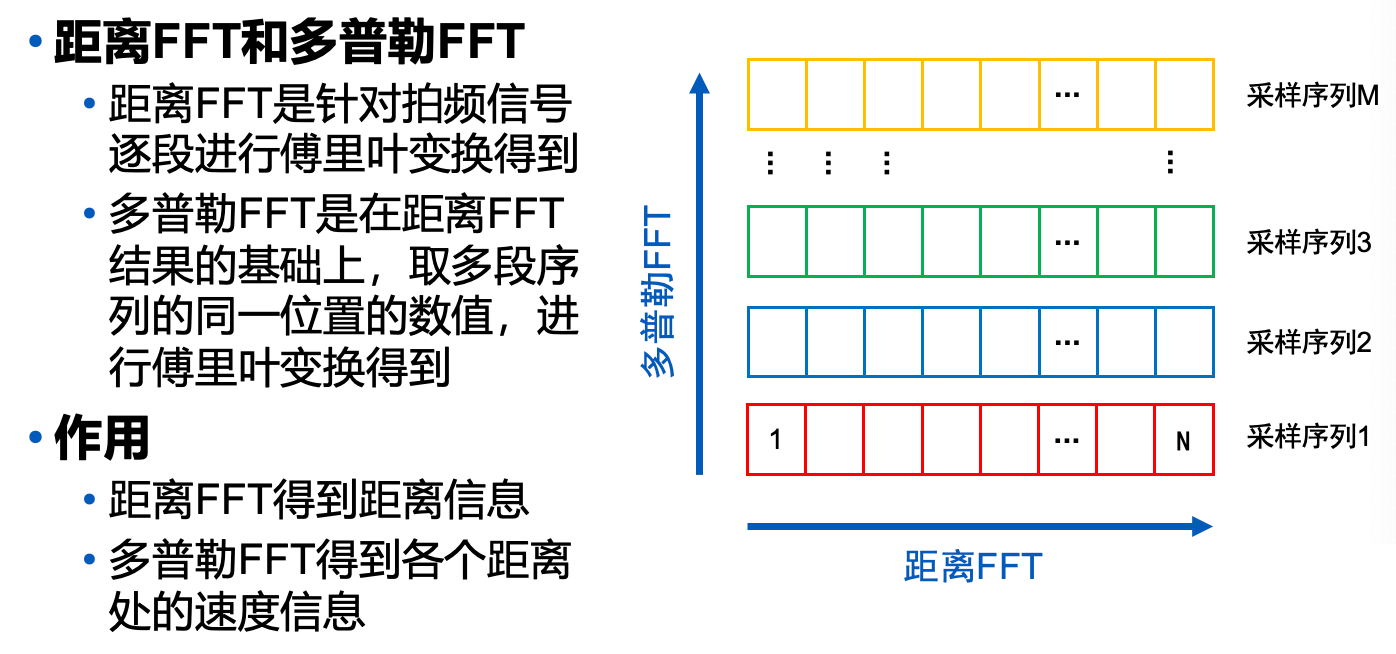
距离FFT和多普勒FFT¶
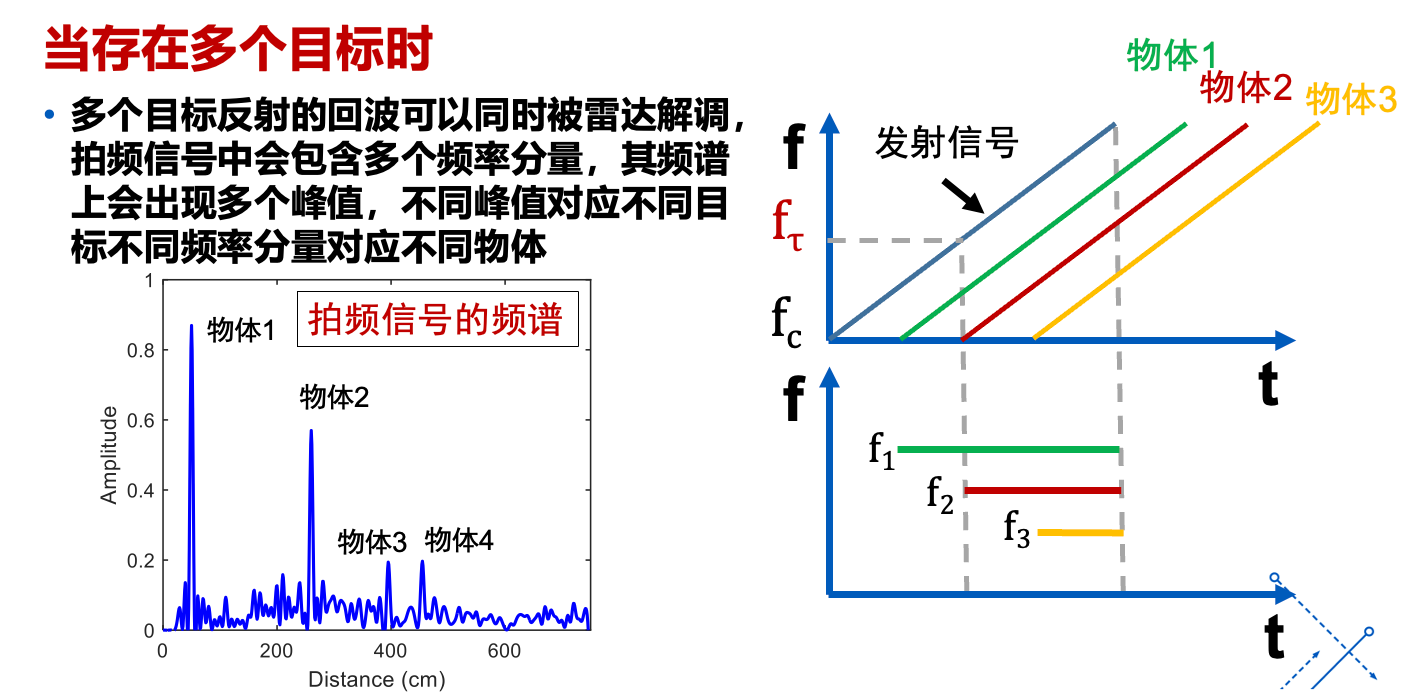
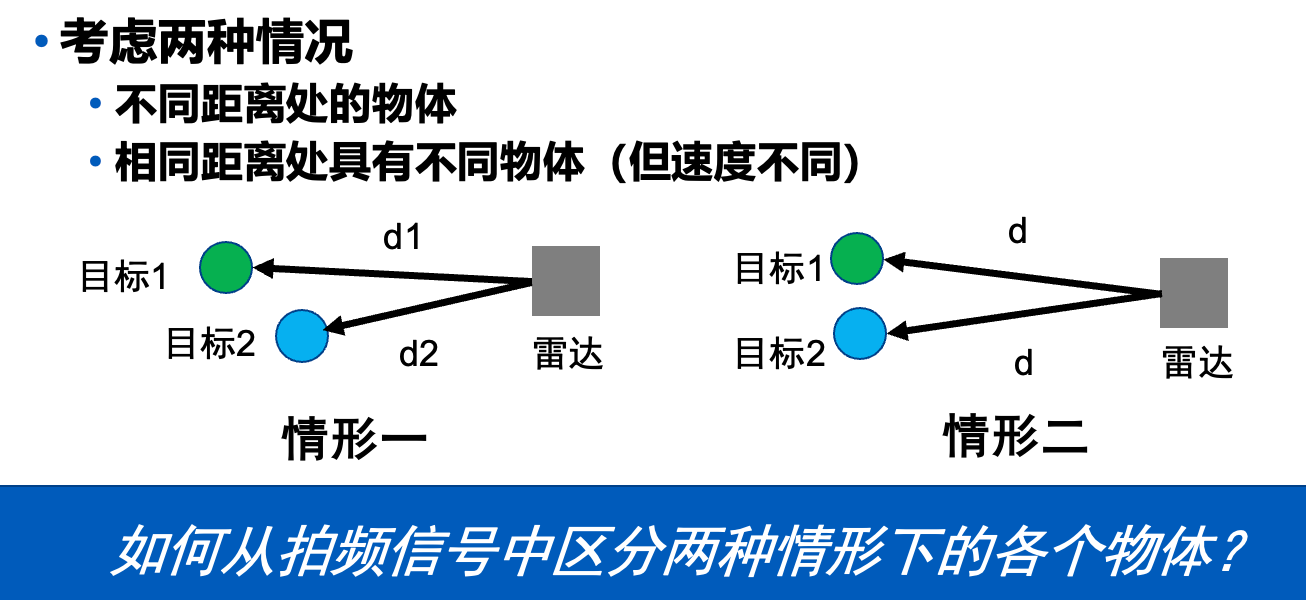
雷达多目标感知¶
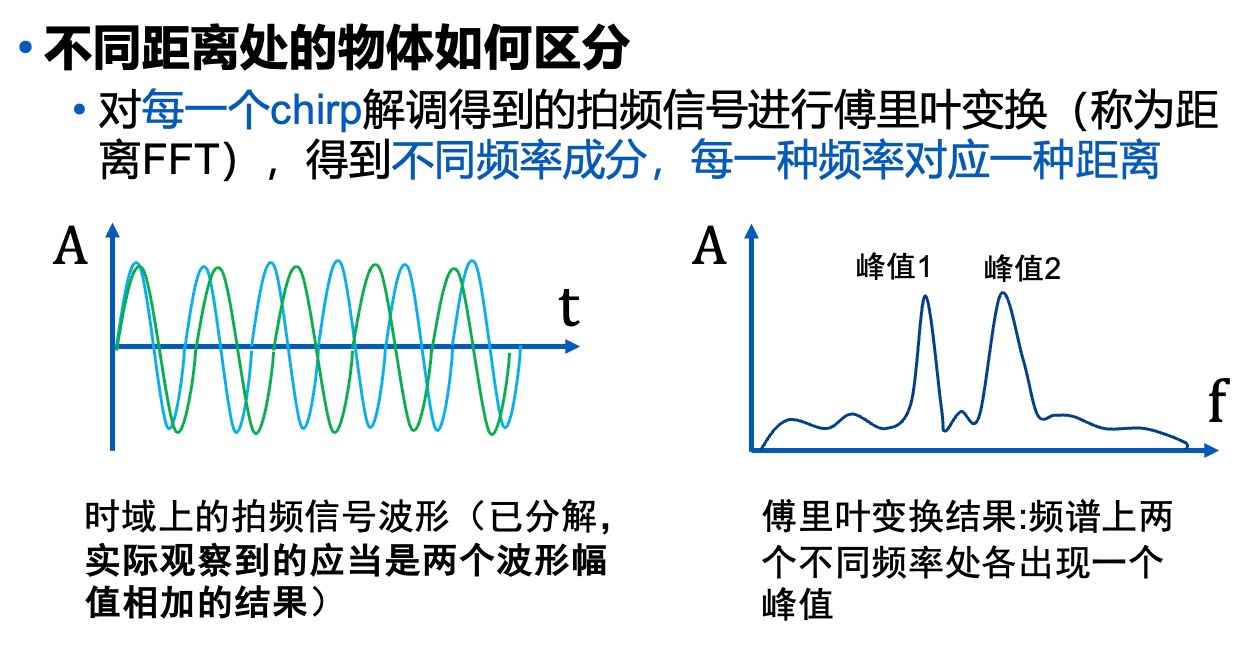
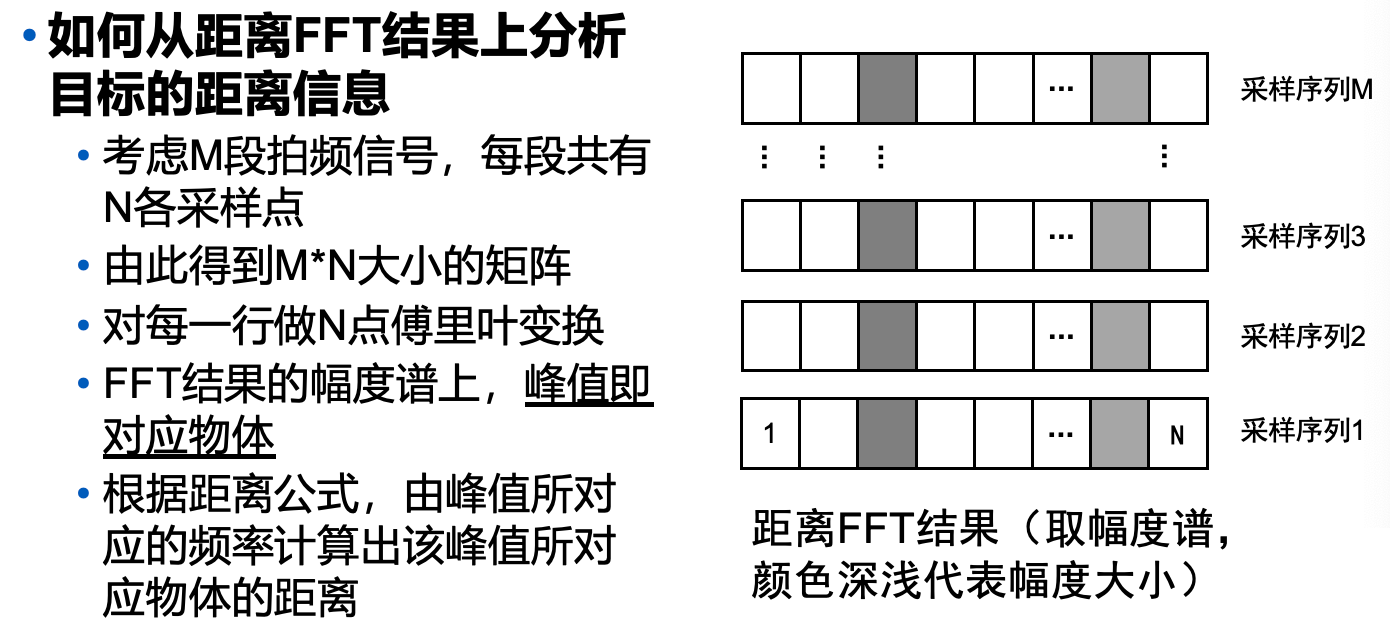
距离FFT¶

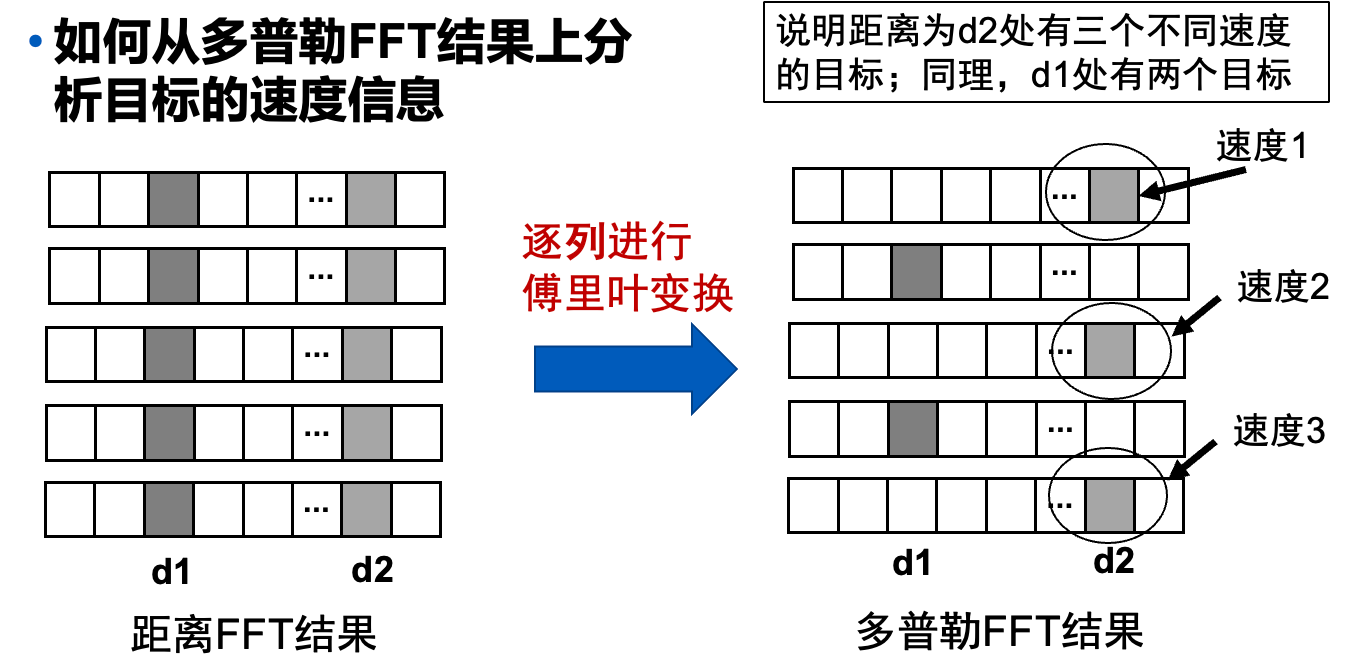
多普勒FFT¶
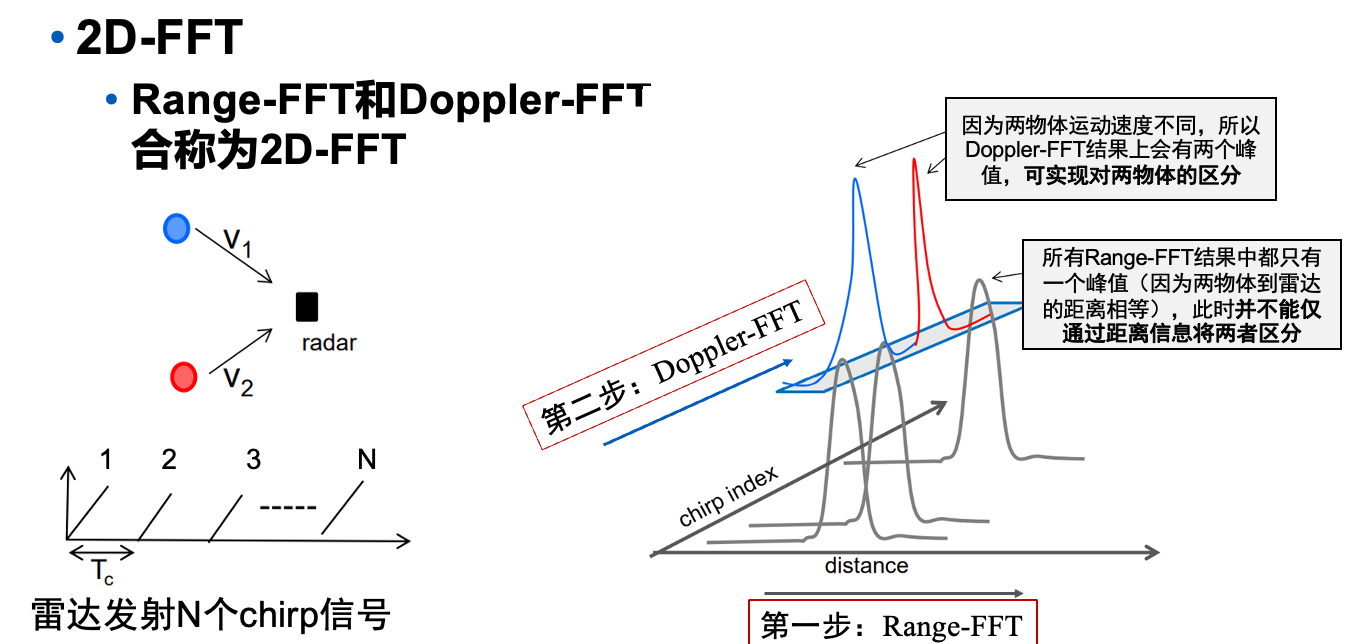
2D-FFT¶

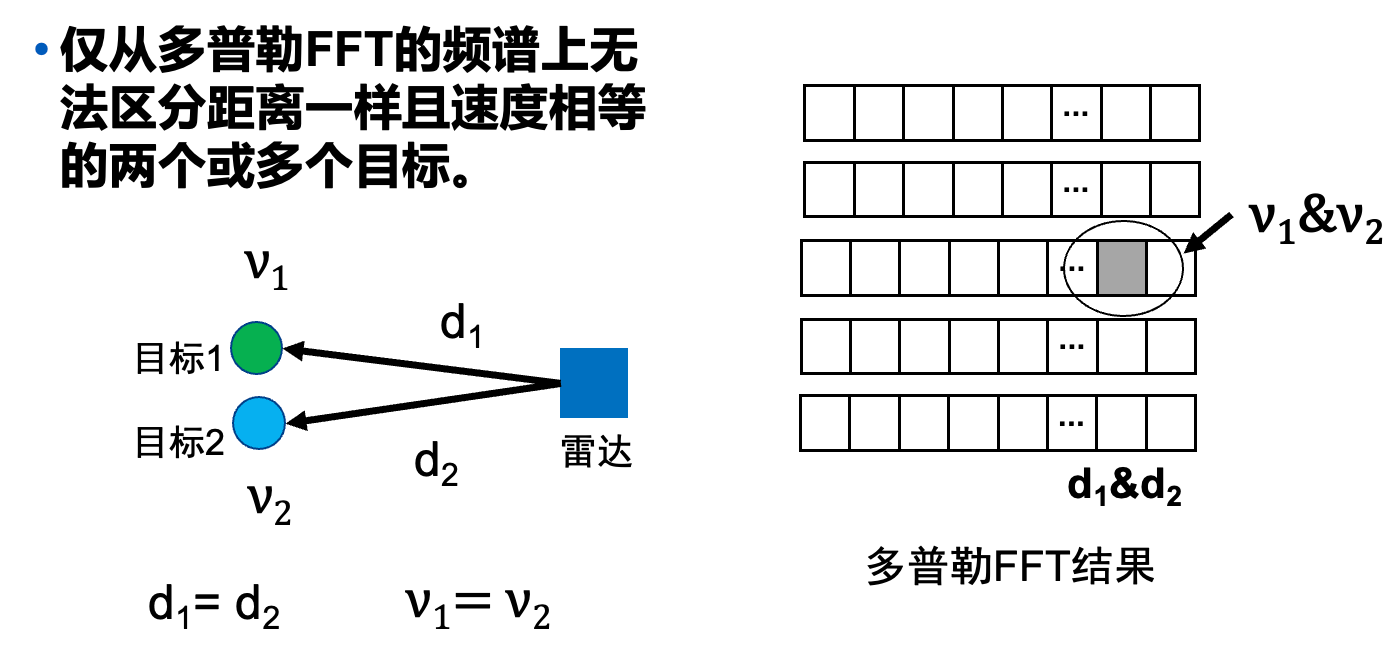
2D-FFT的缺陷
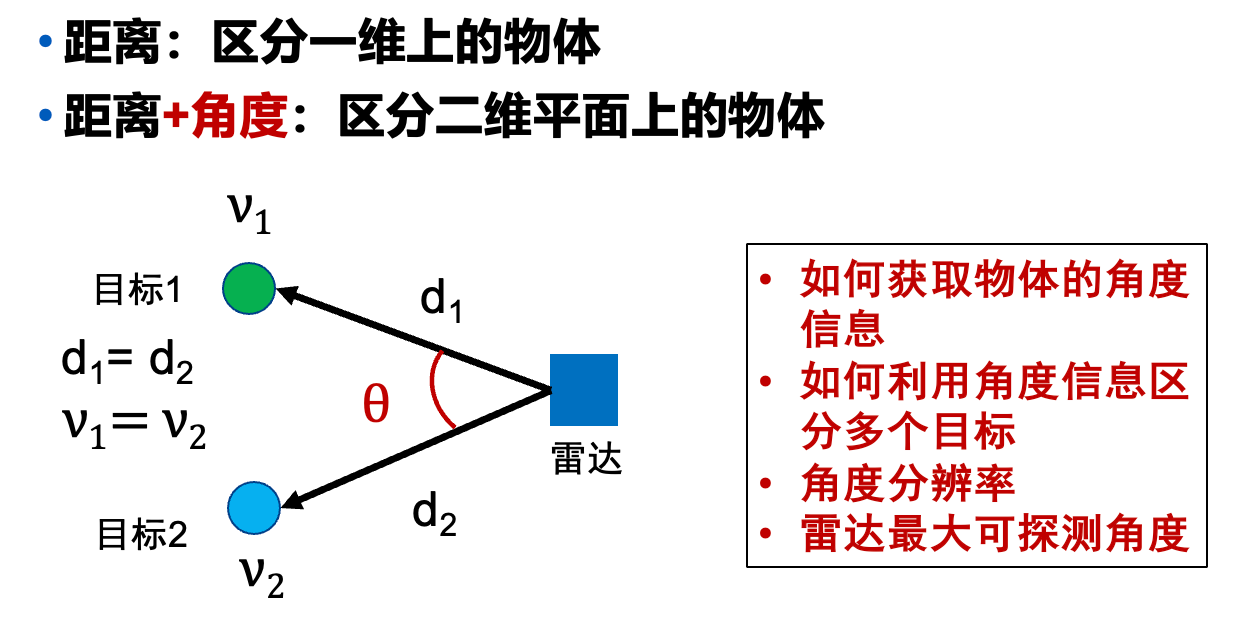
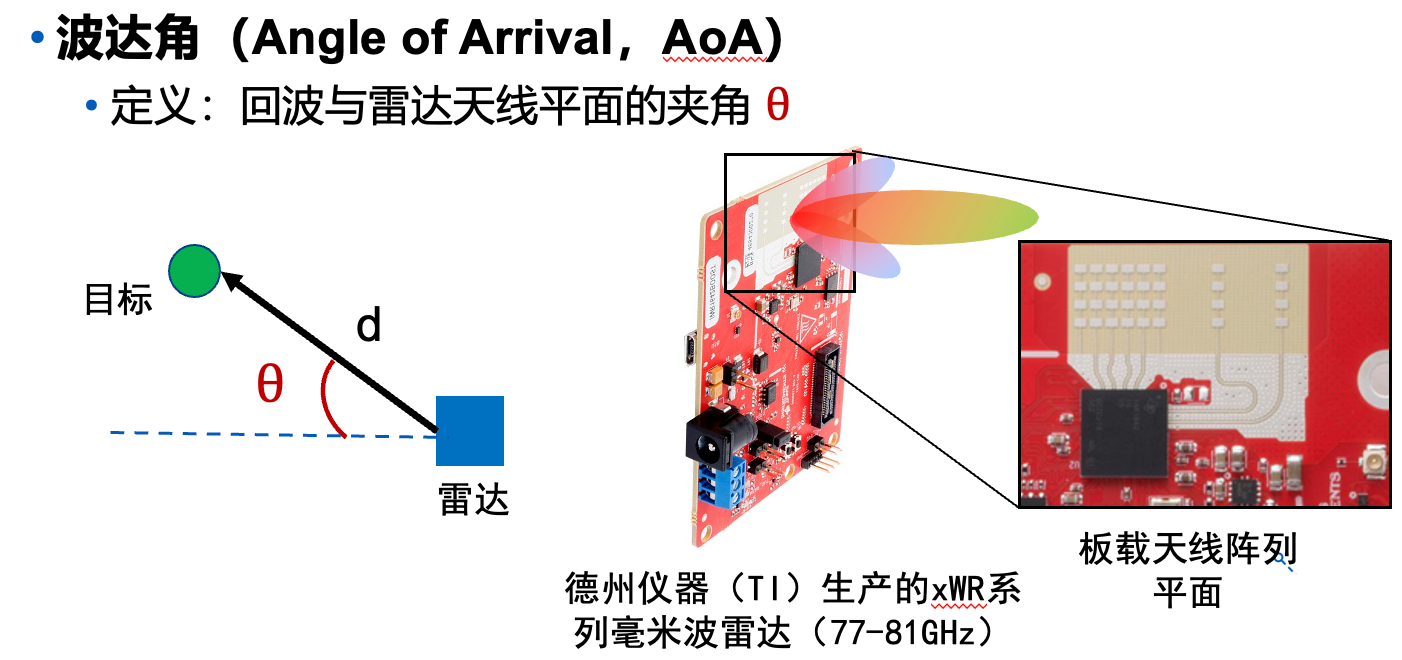
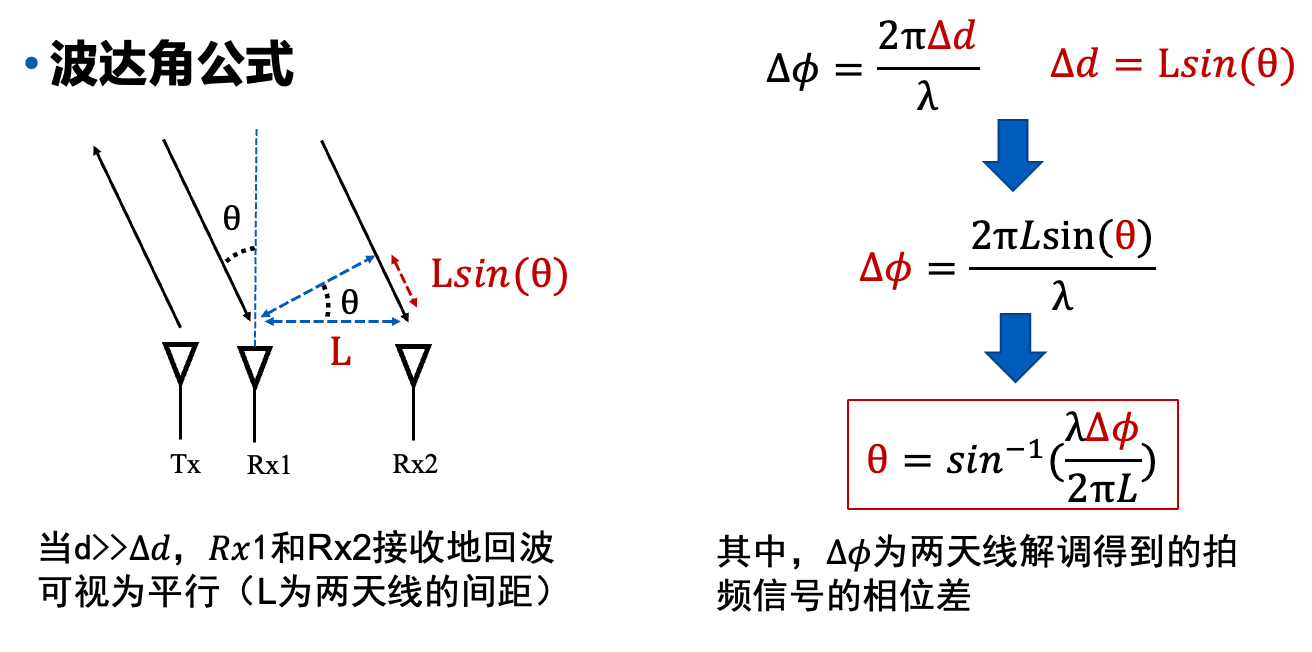
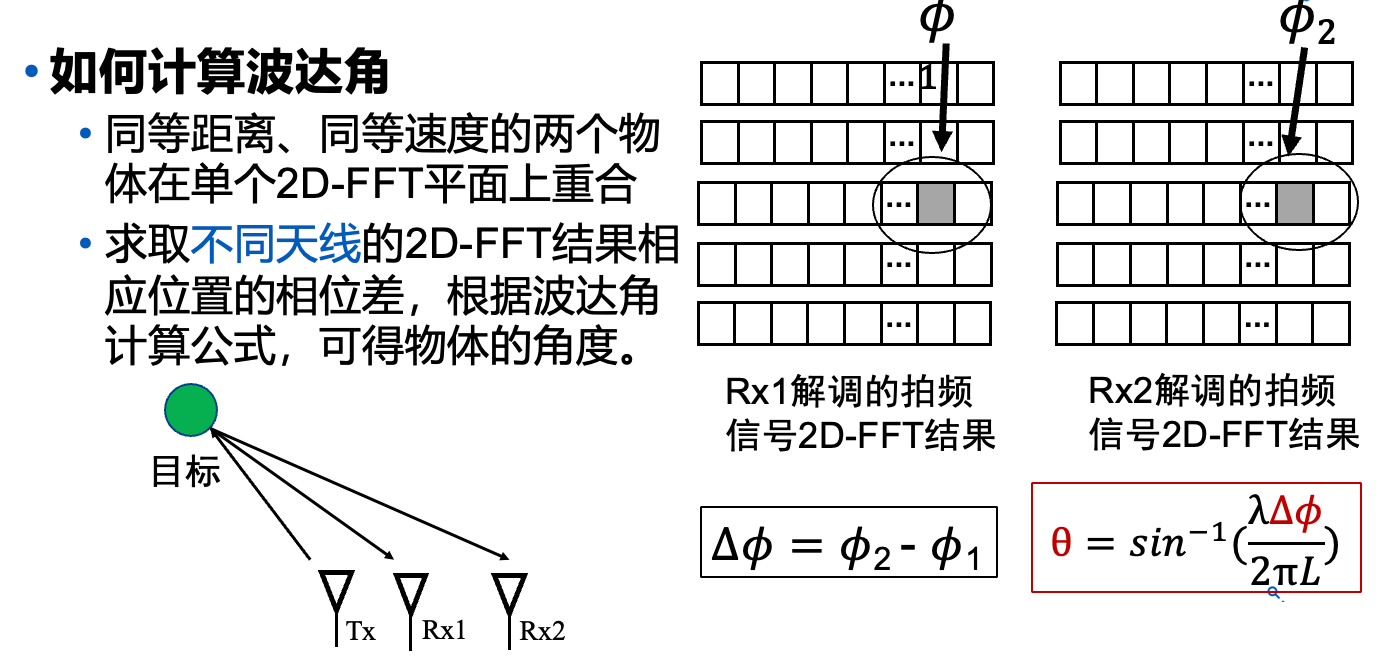
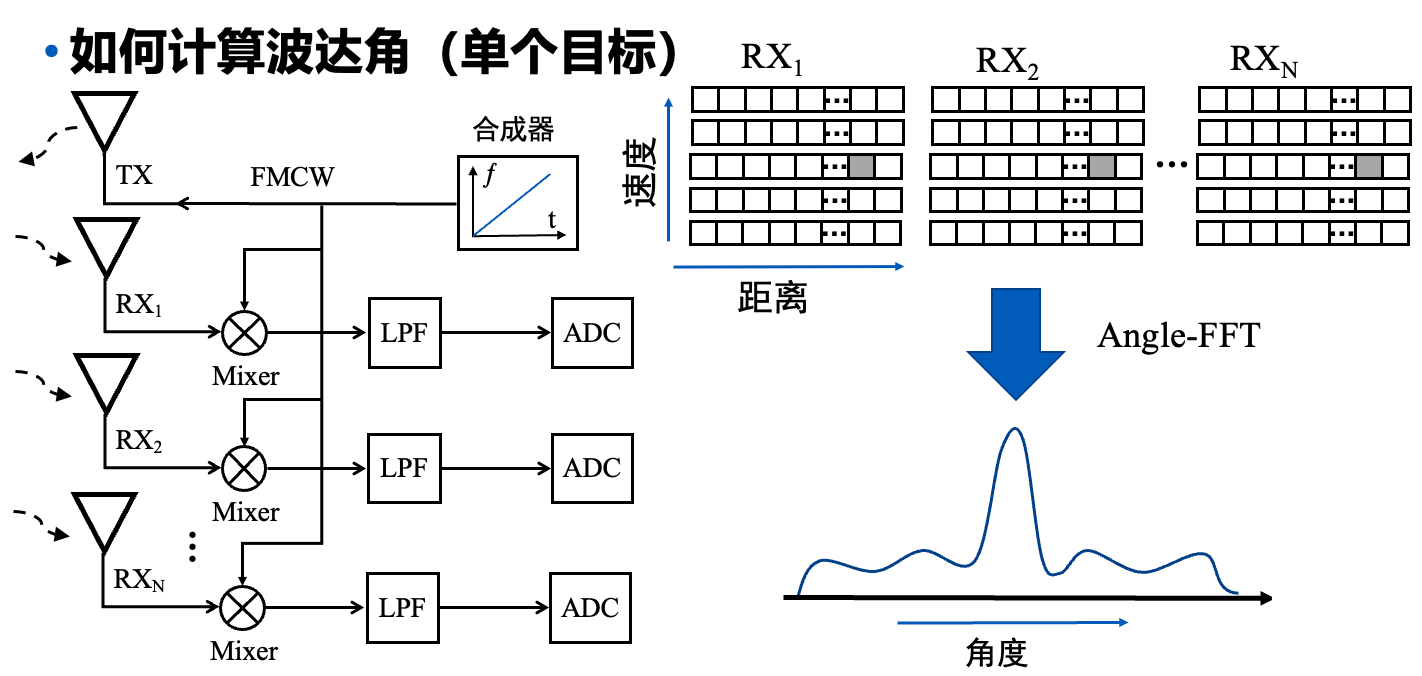
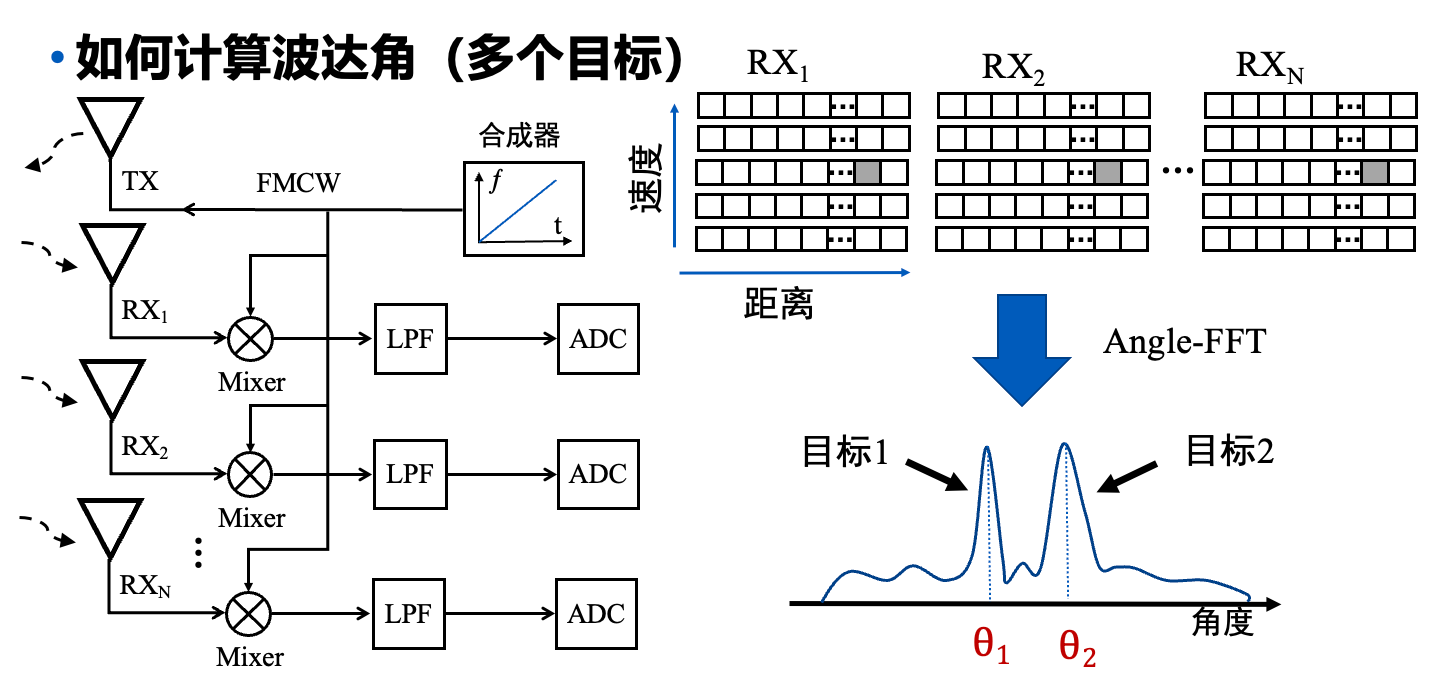
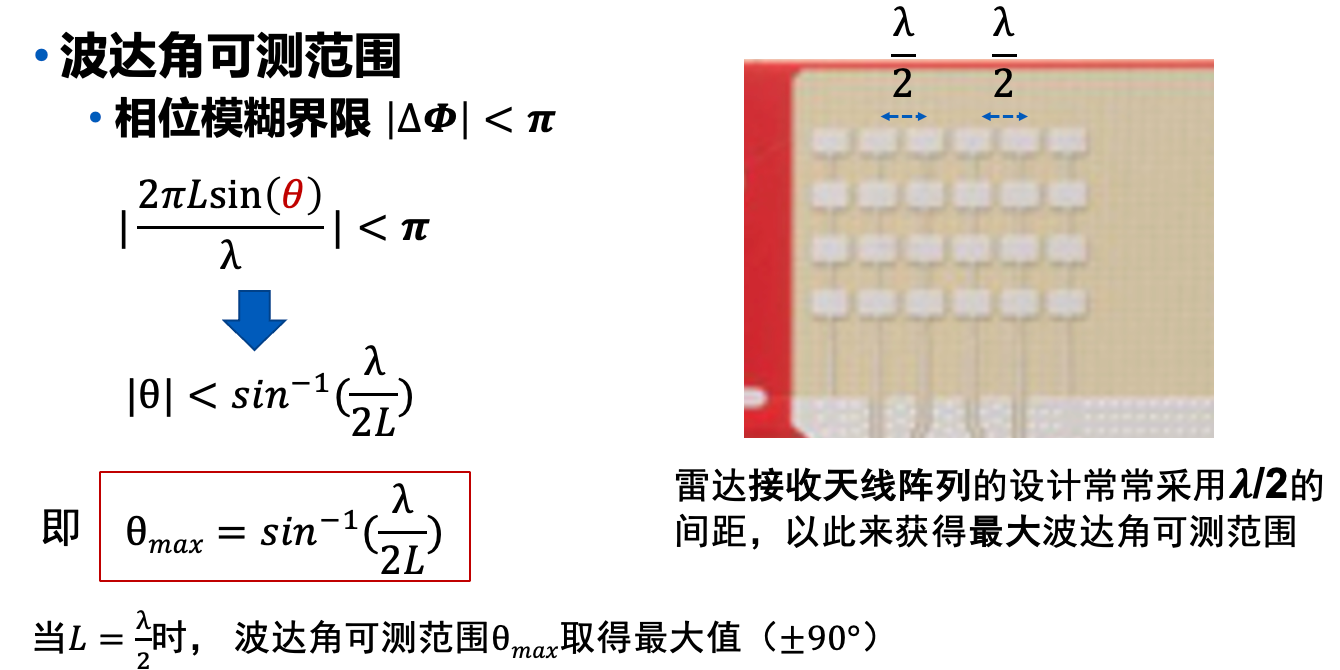
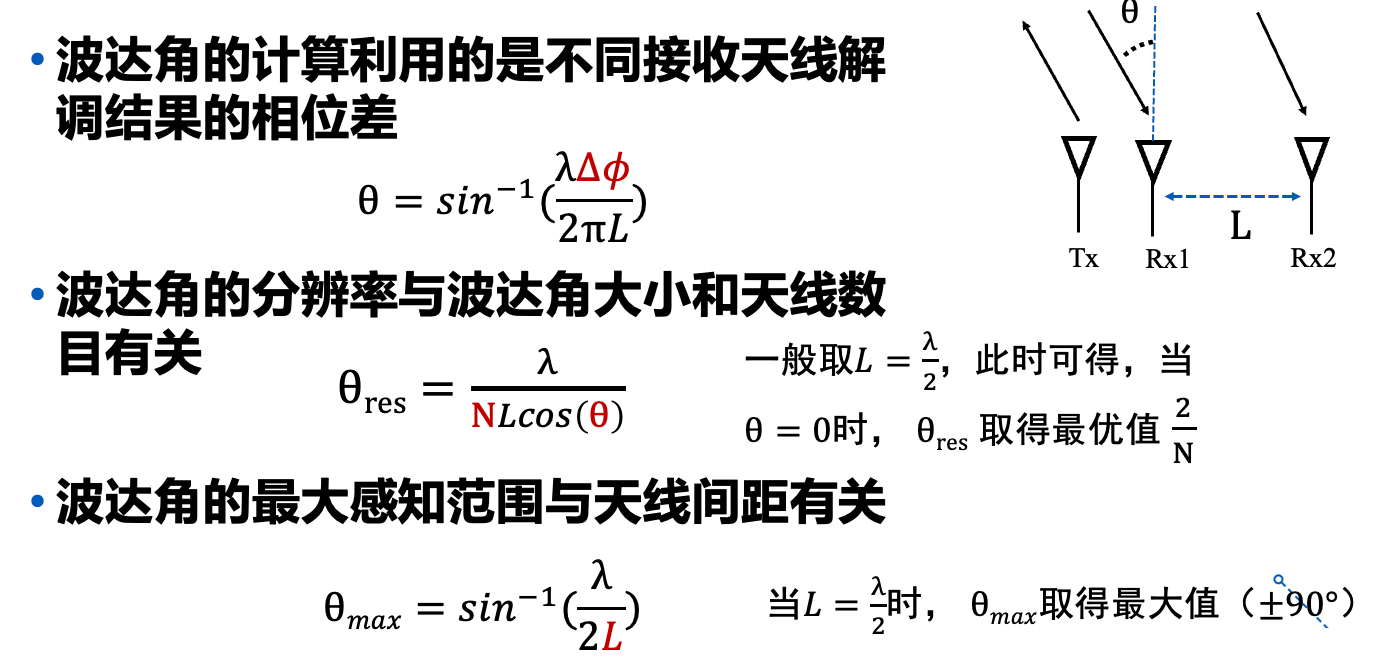
目标的方位角¶
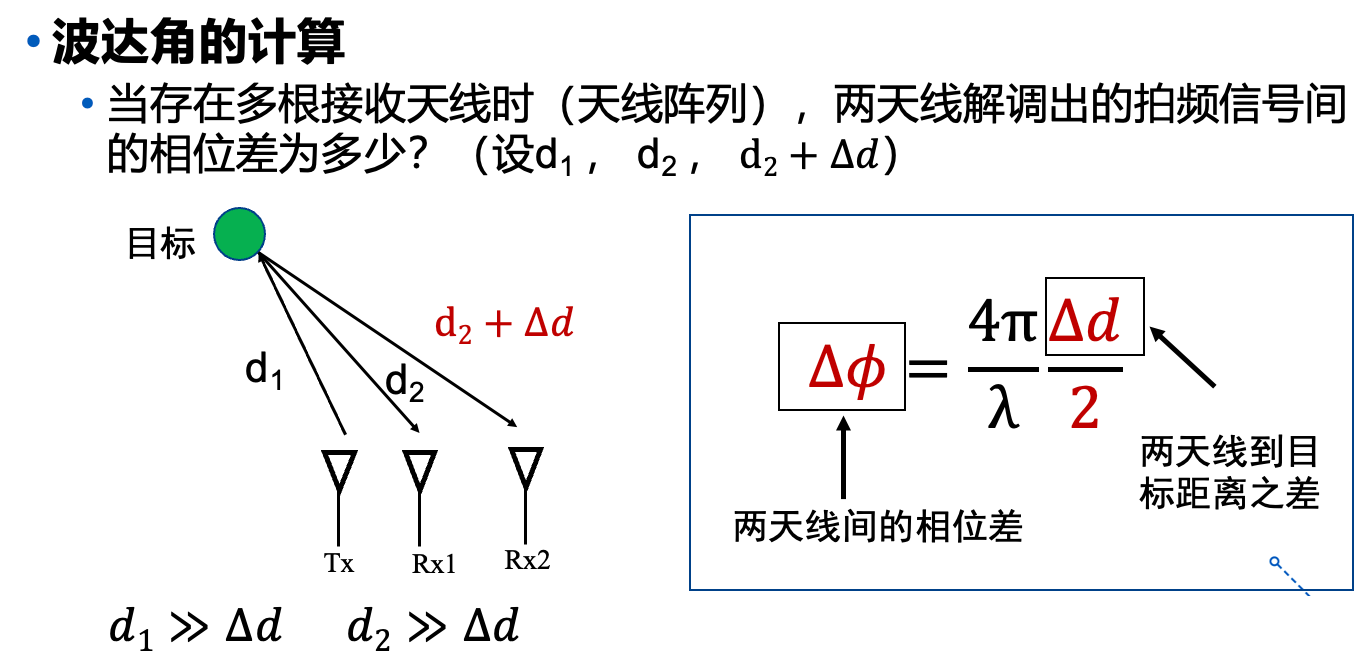
波达角¶
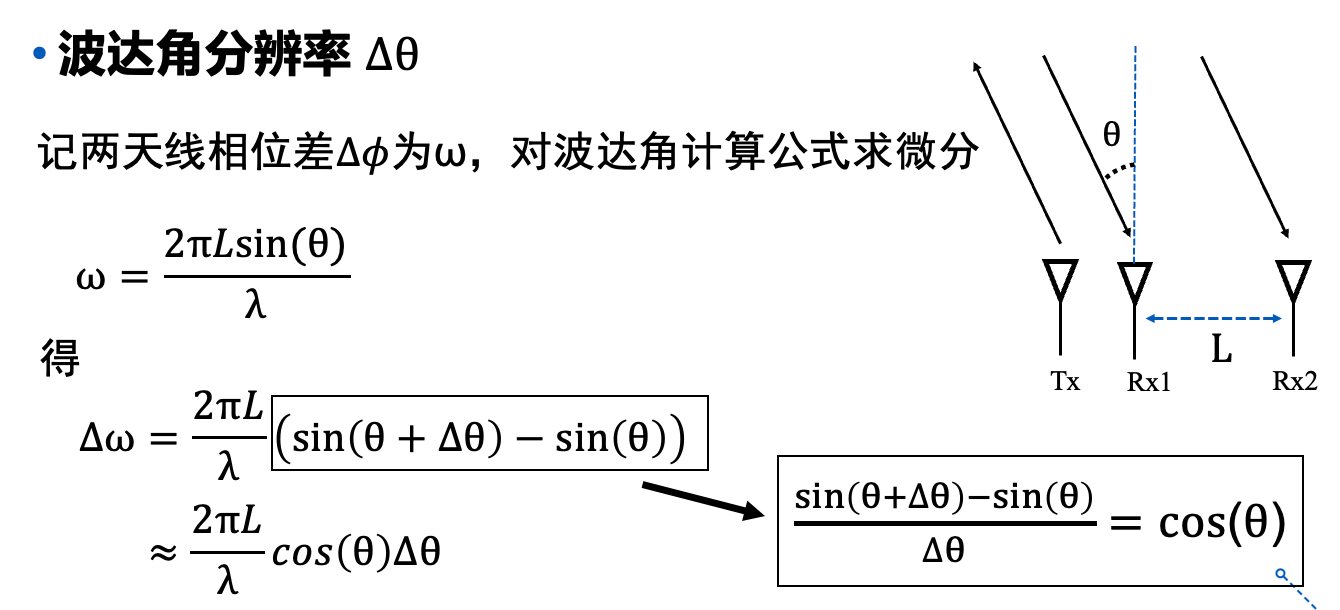
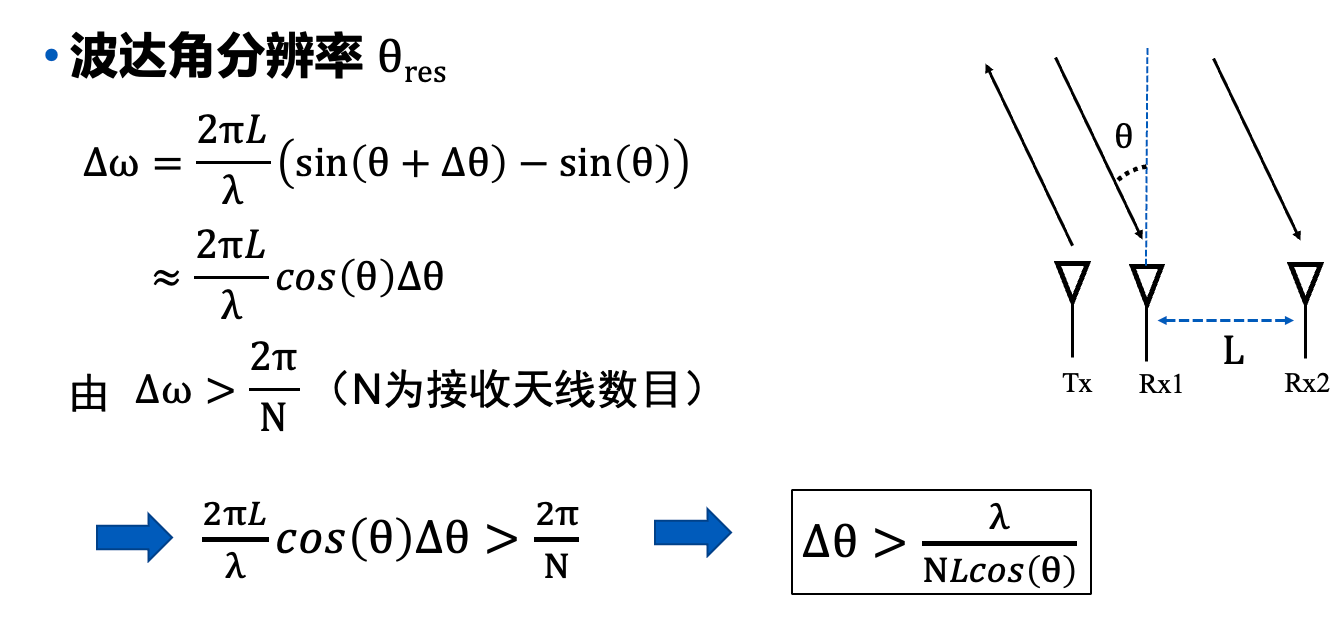
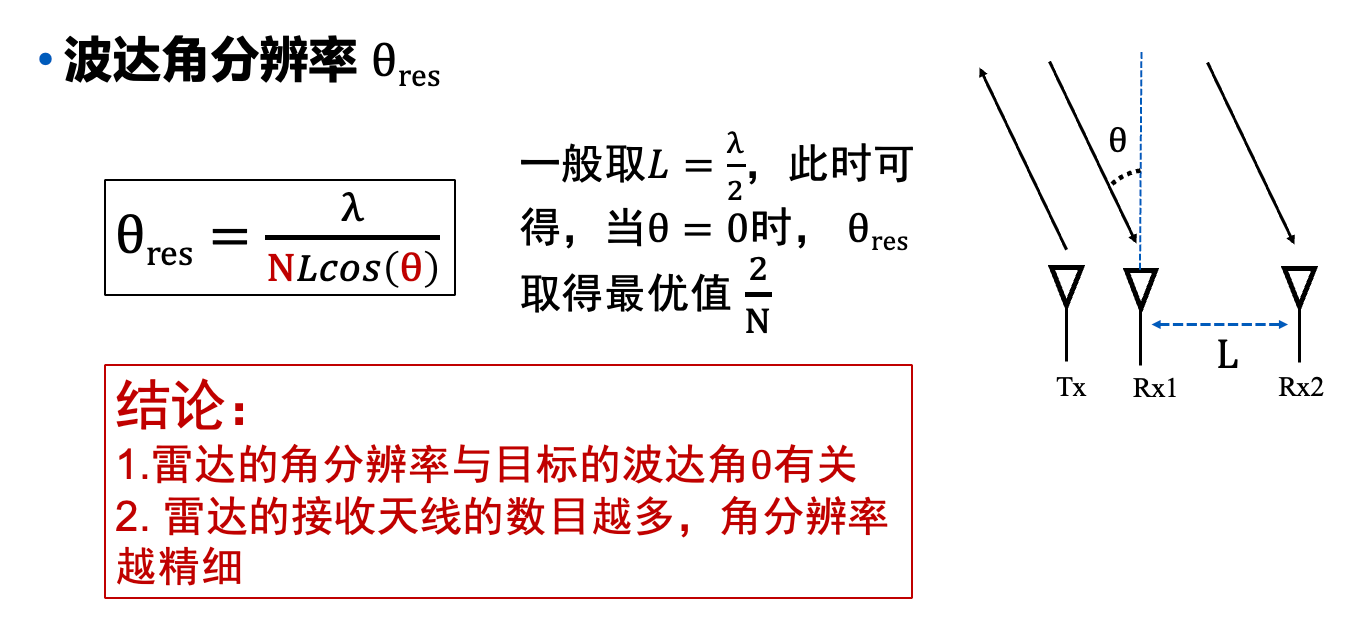
波达角分辨率¶
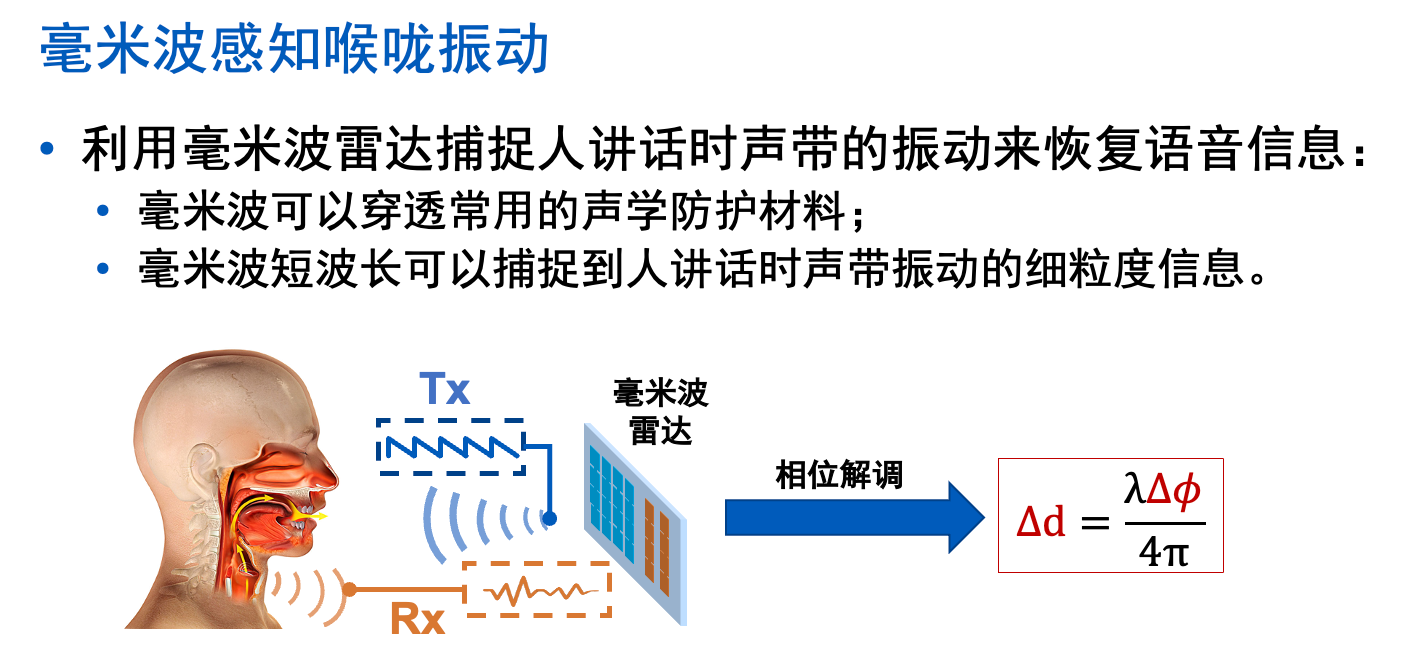
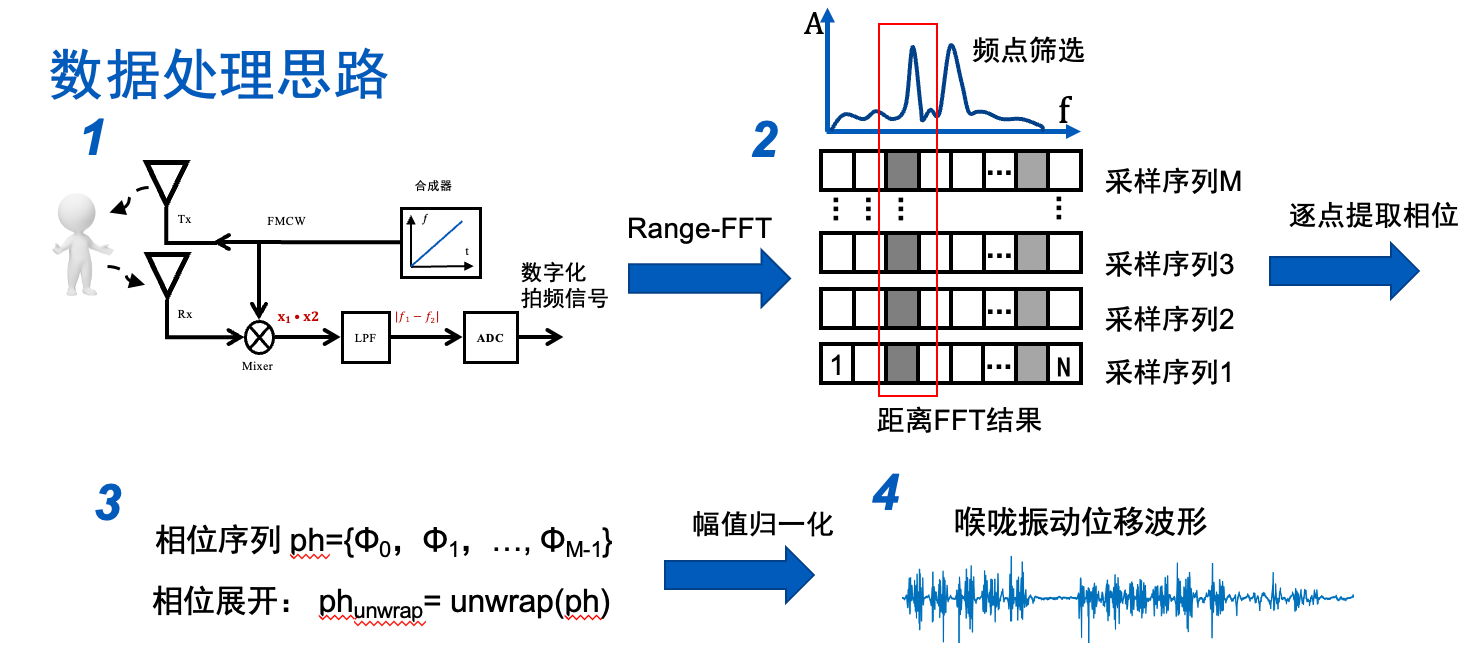
3. 基于毫米波的语音侧信道窃取¶
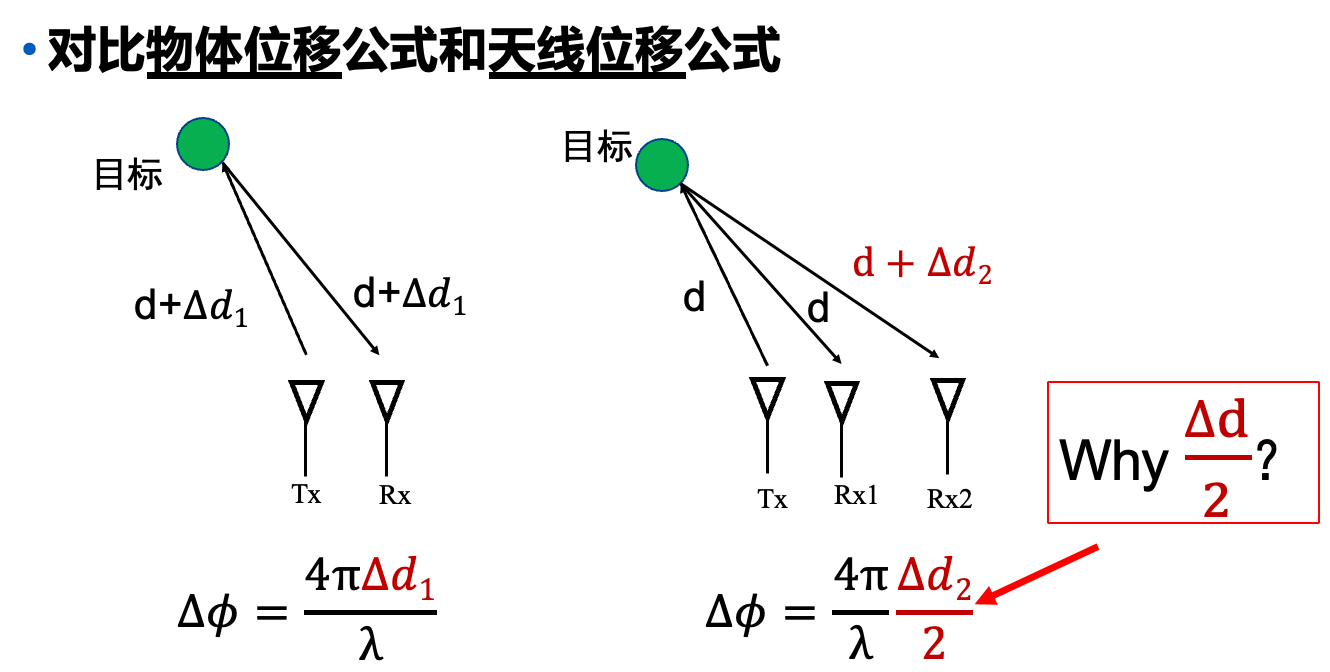
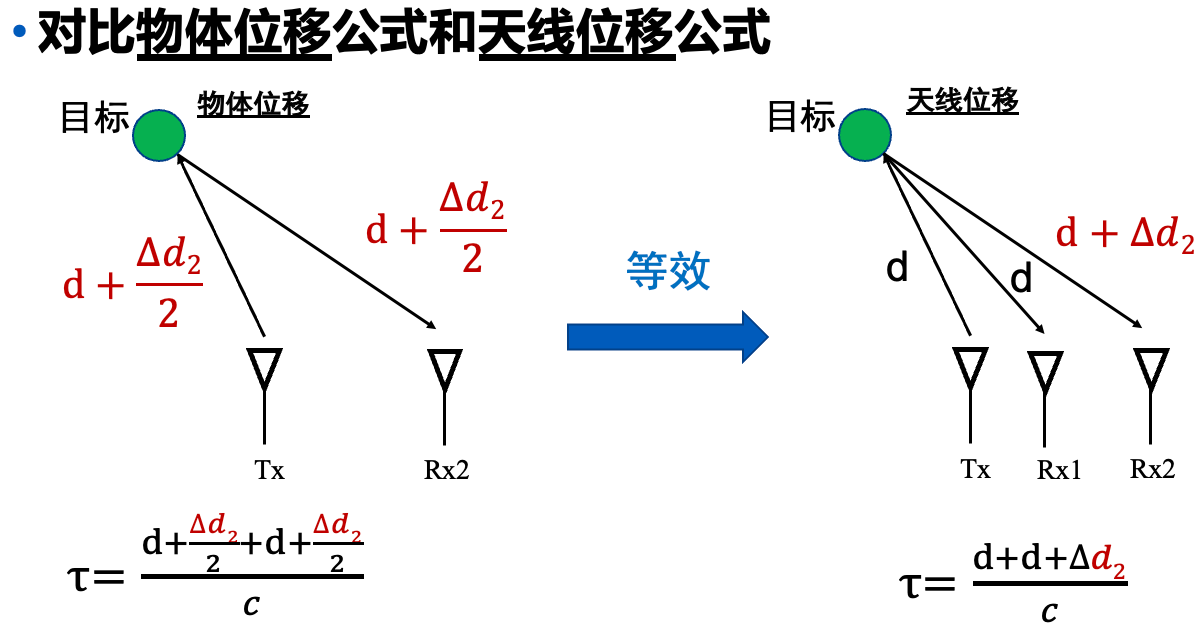
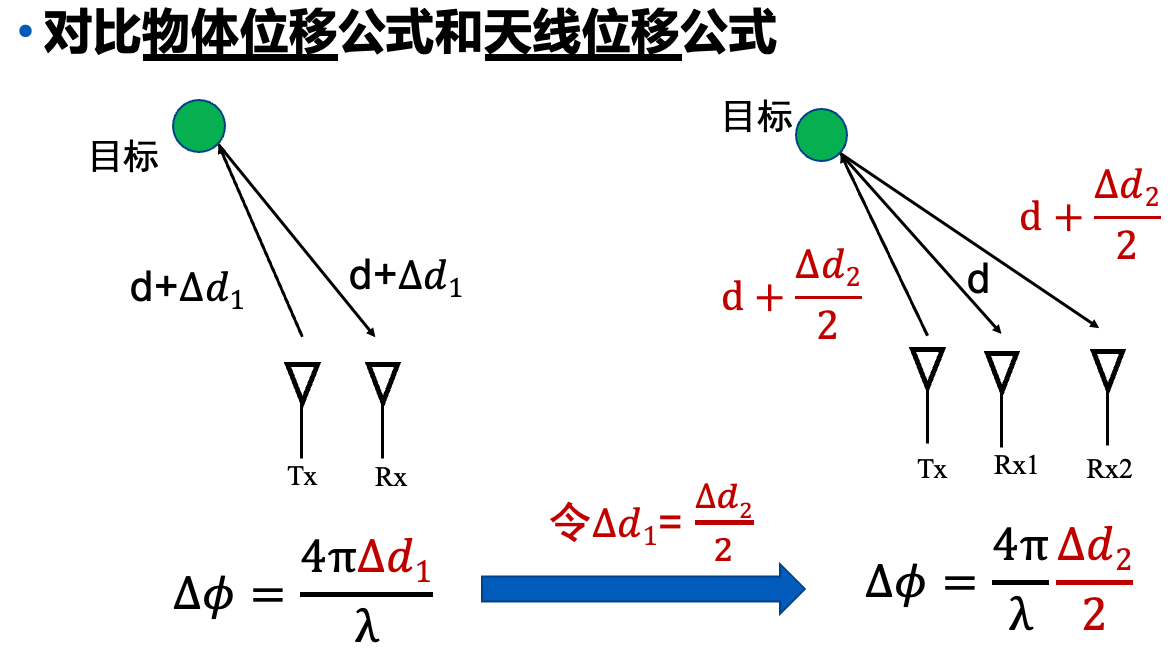
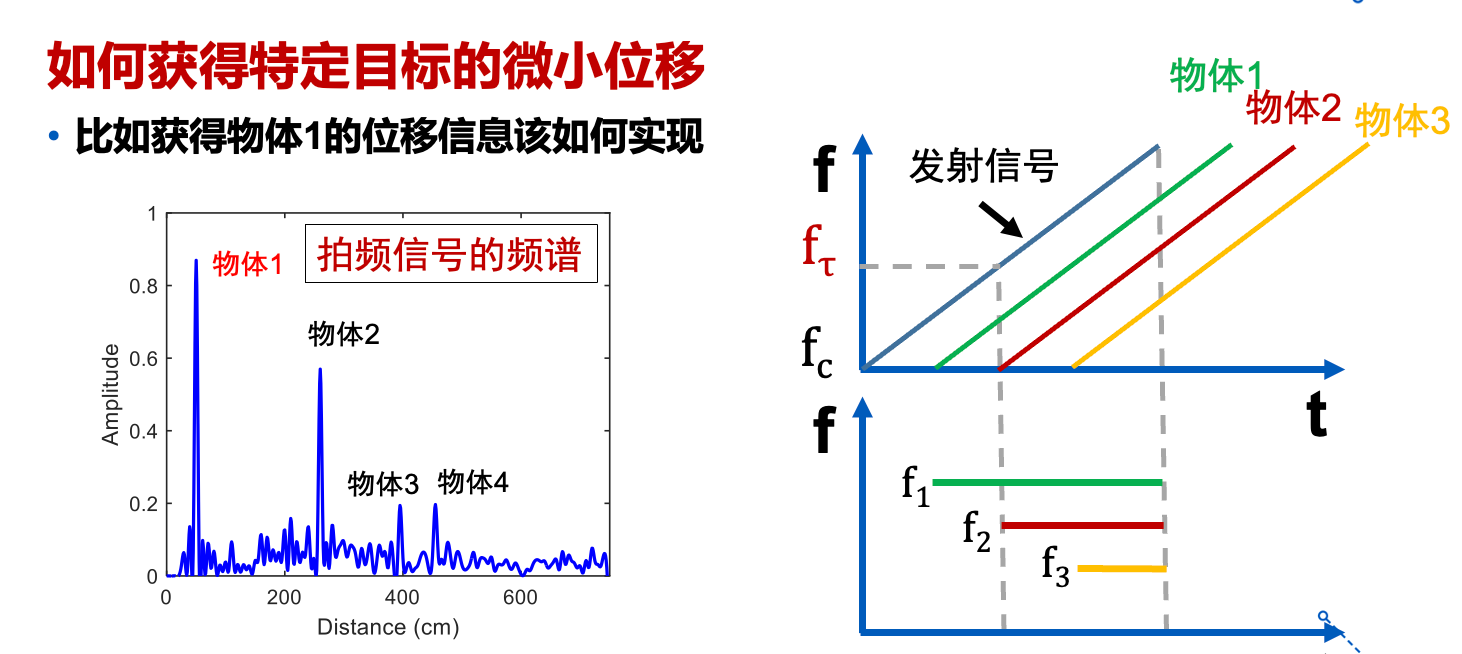
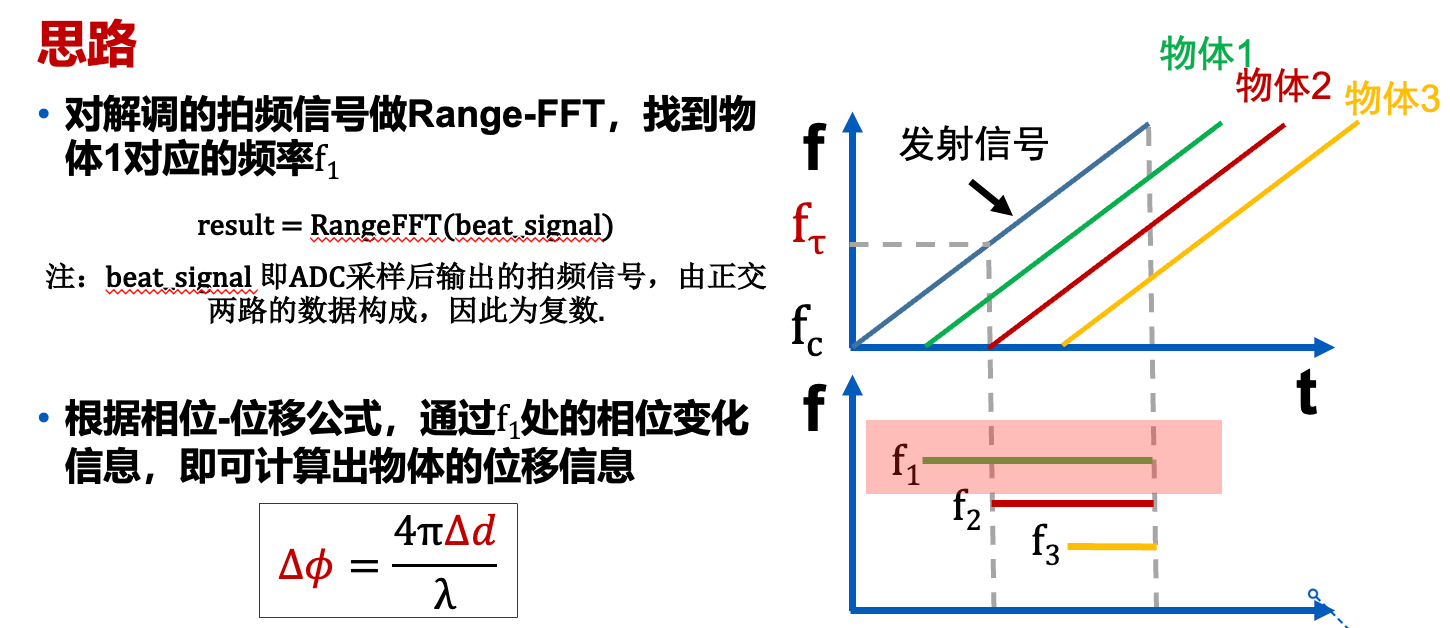
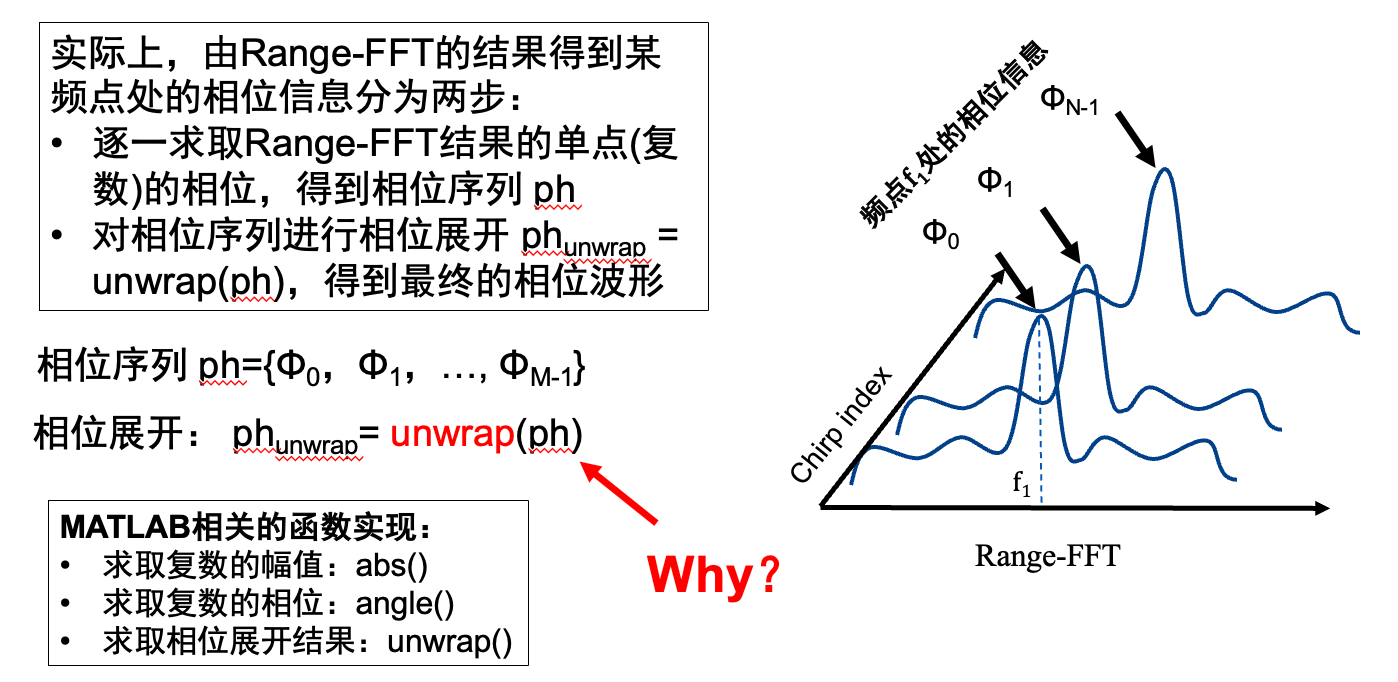
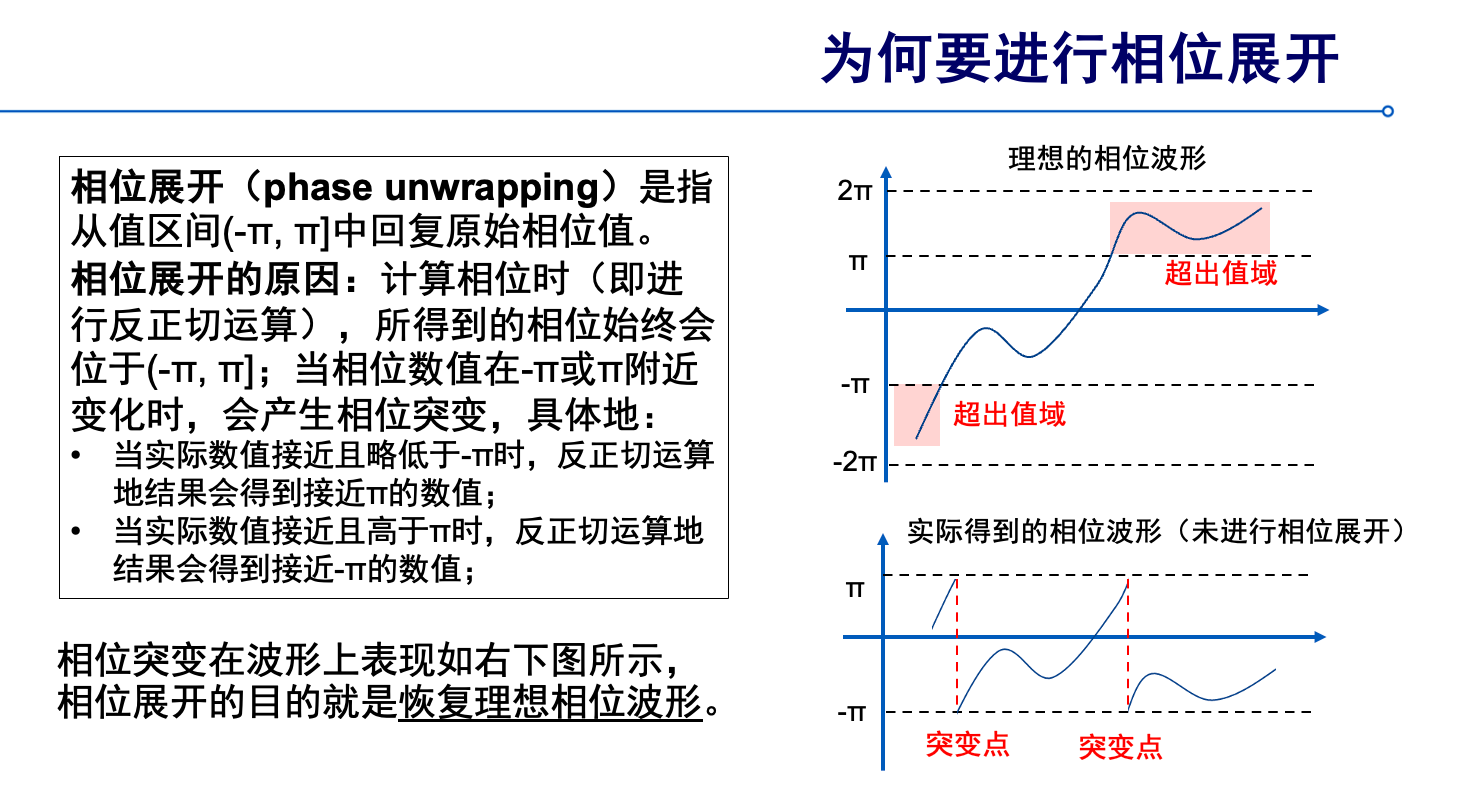
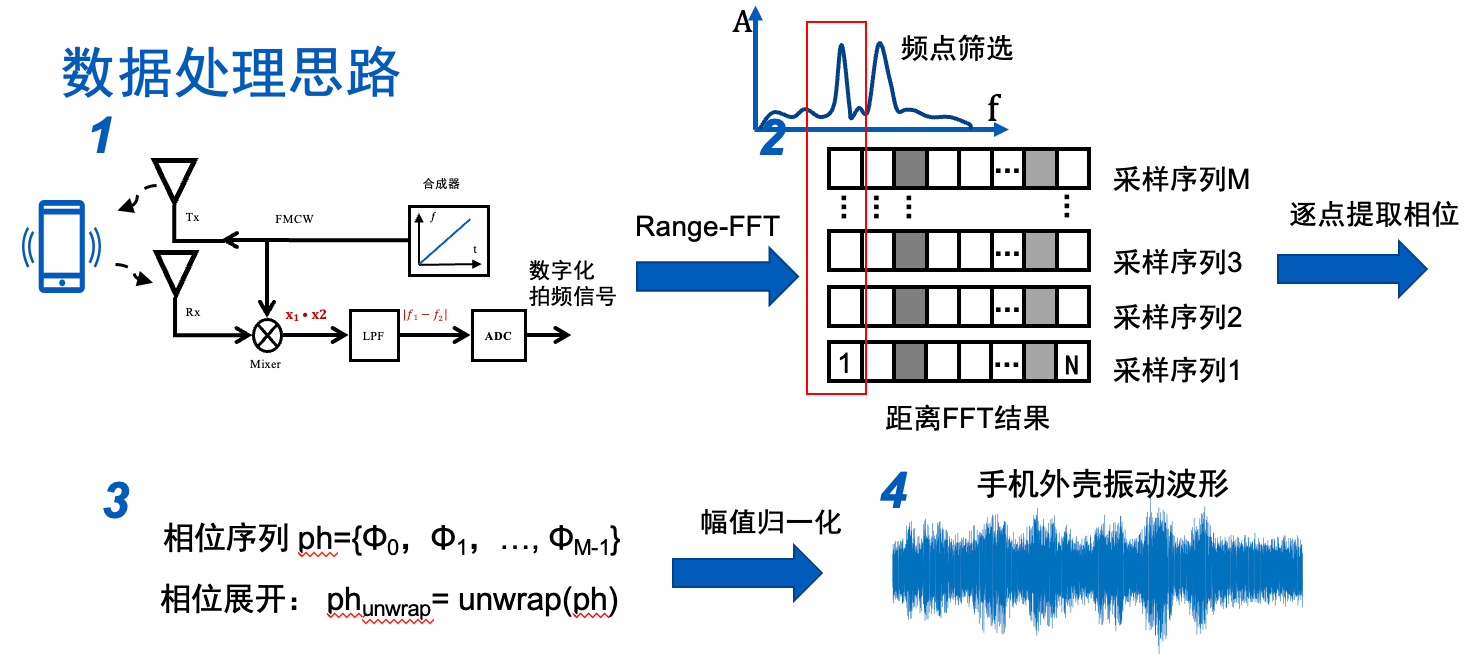
计算特定目标的位移¶
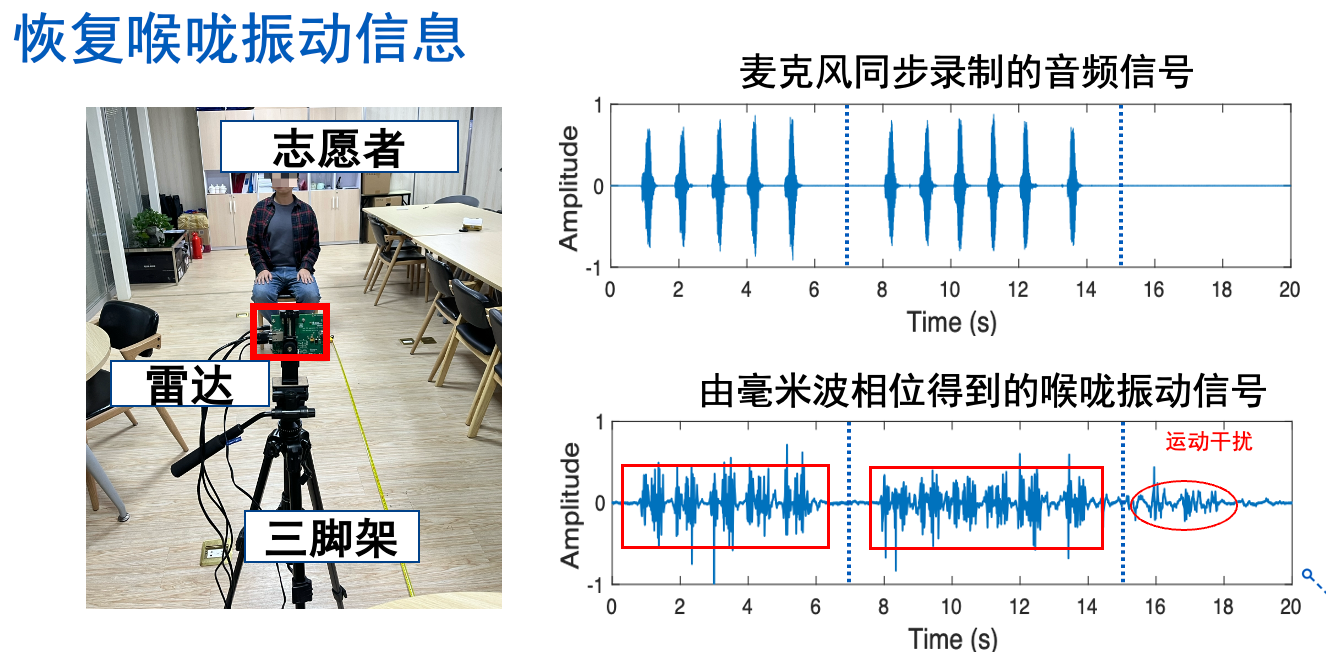
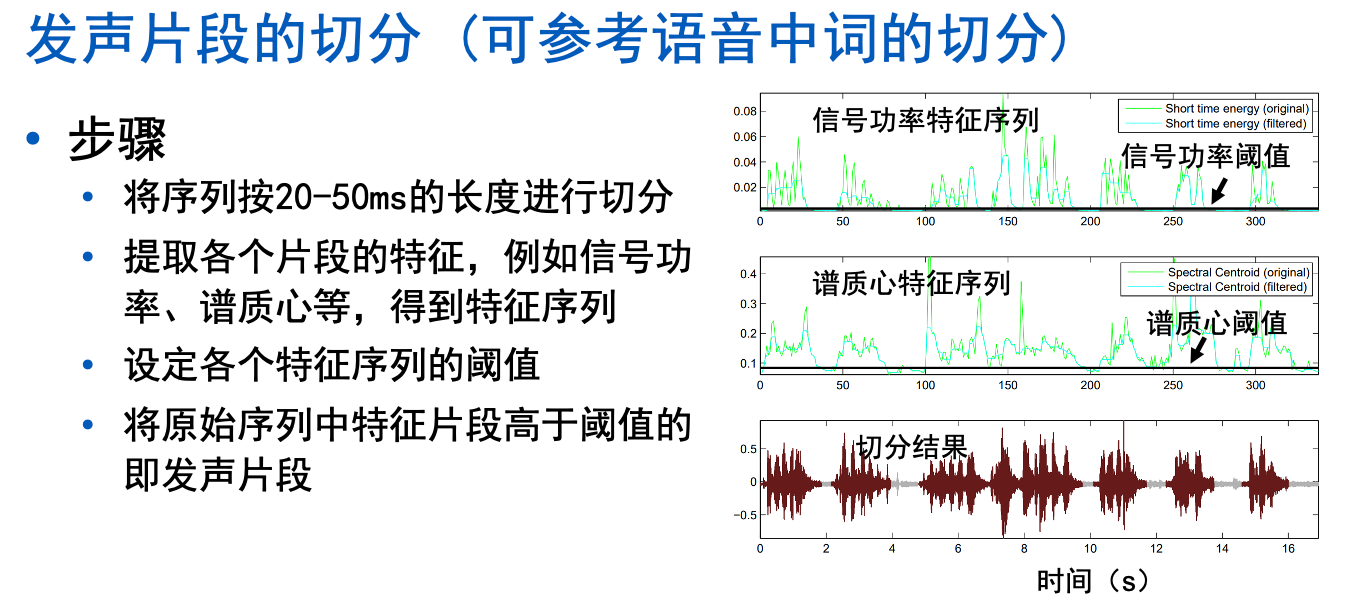
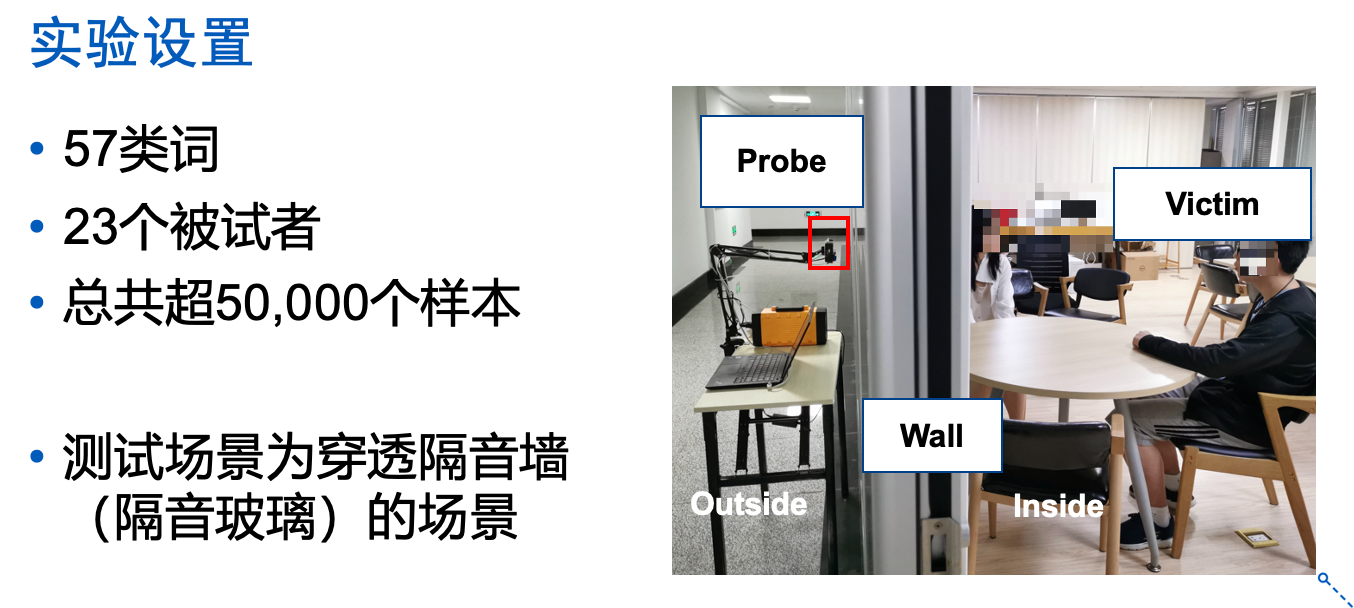
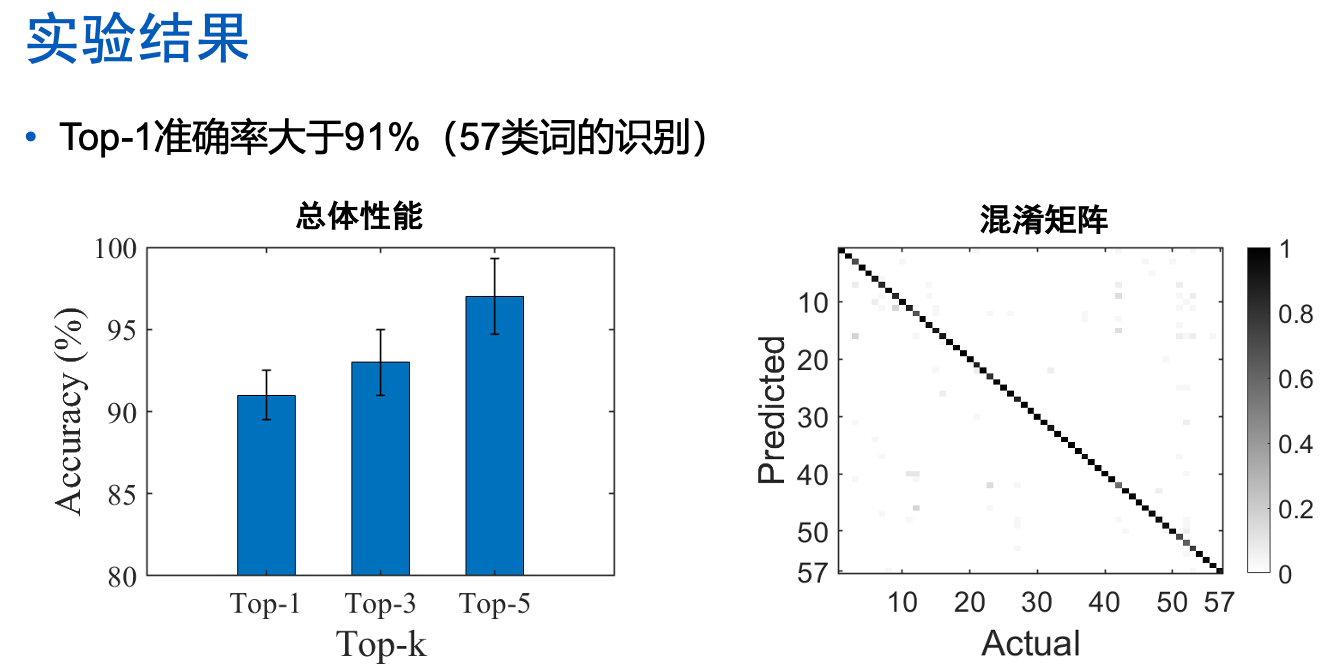
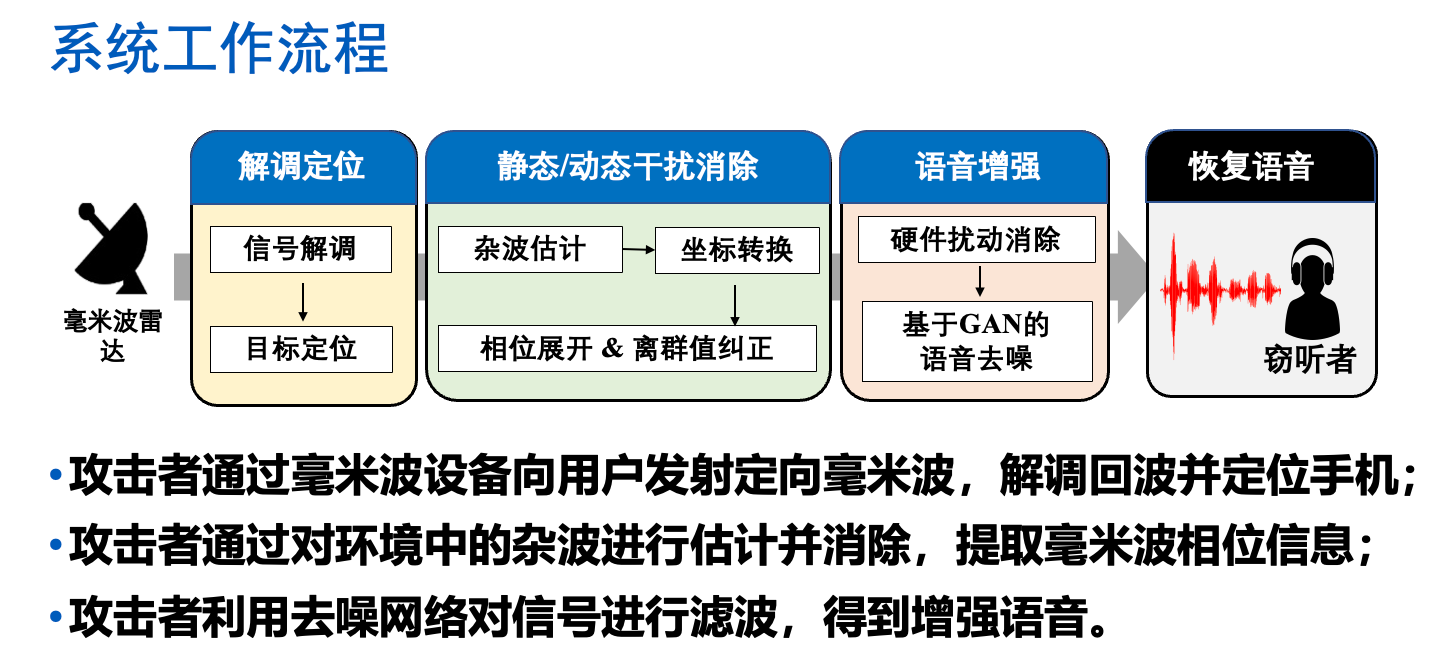
基于毫米波的语音侧信道窃听¶
1. Wavesdropper: 基于毫米波的可穿墙讲话人语音检测(针对人)¶

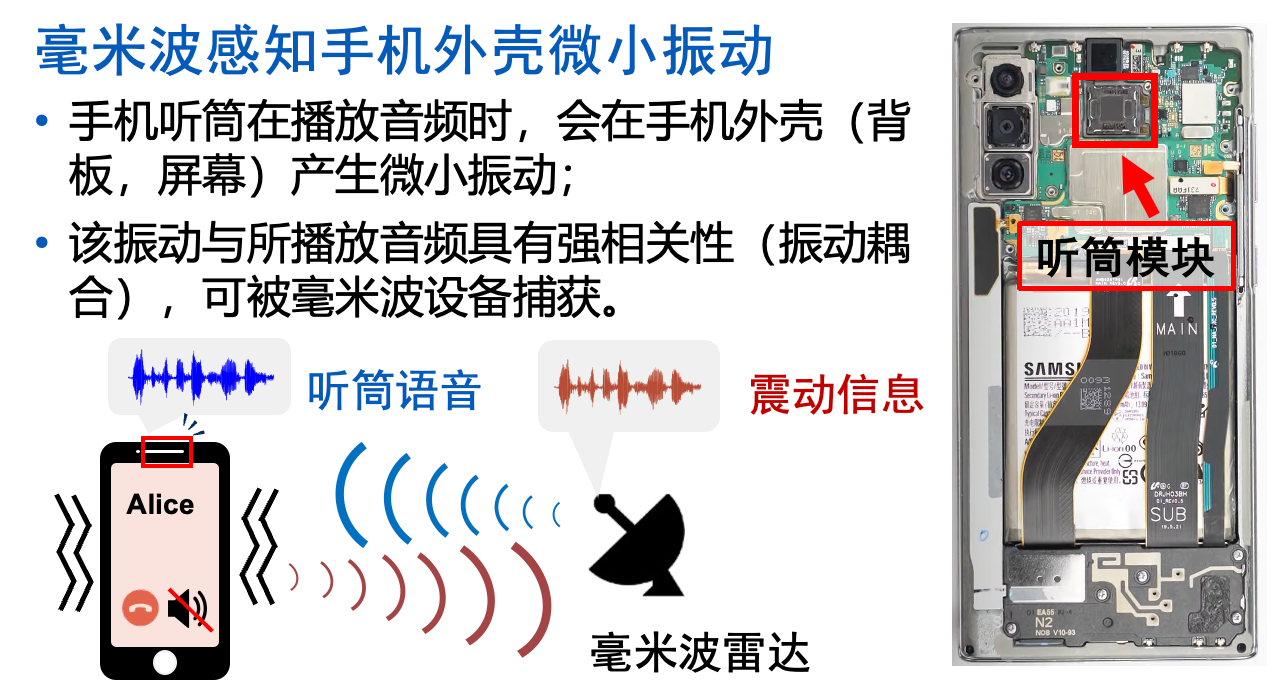
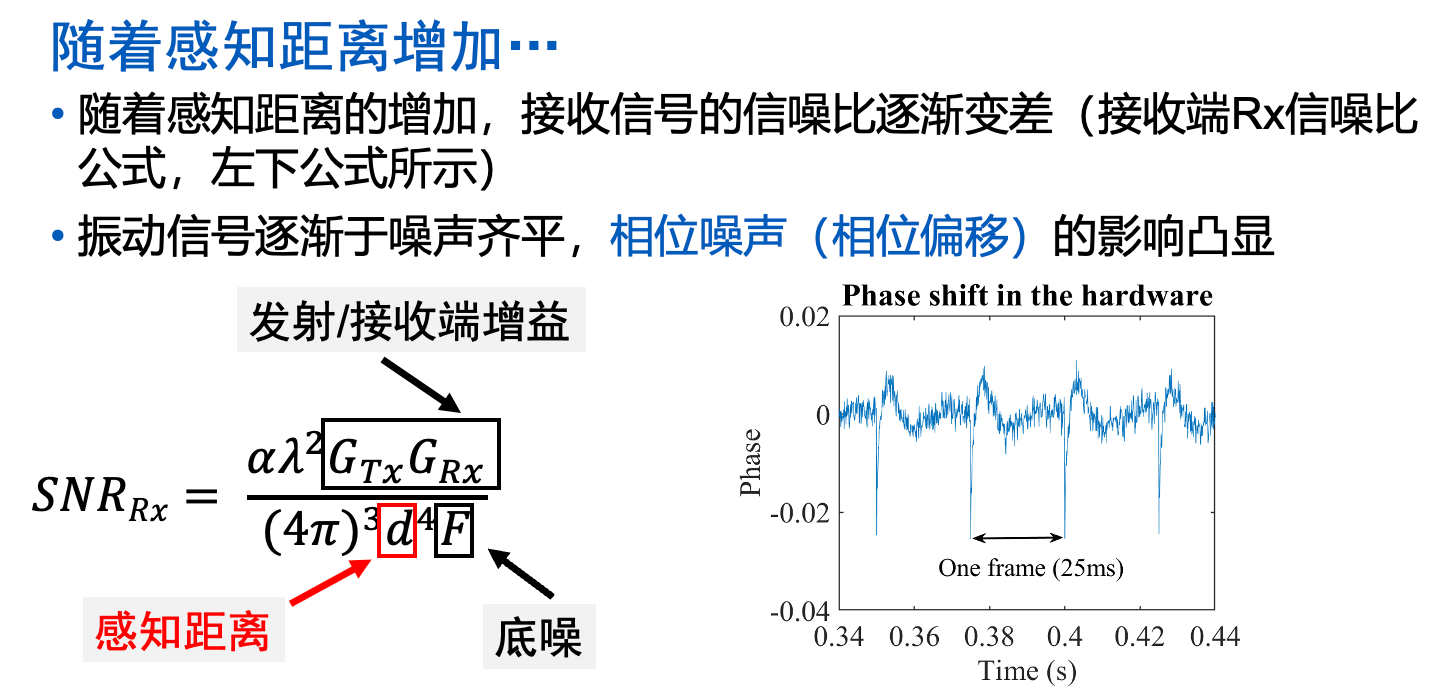
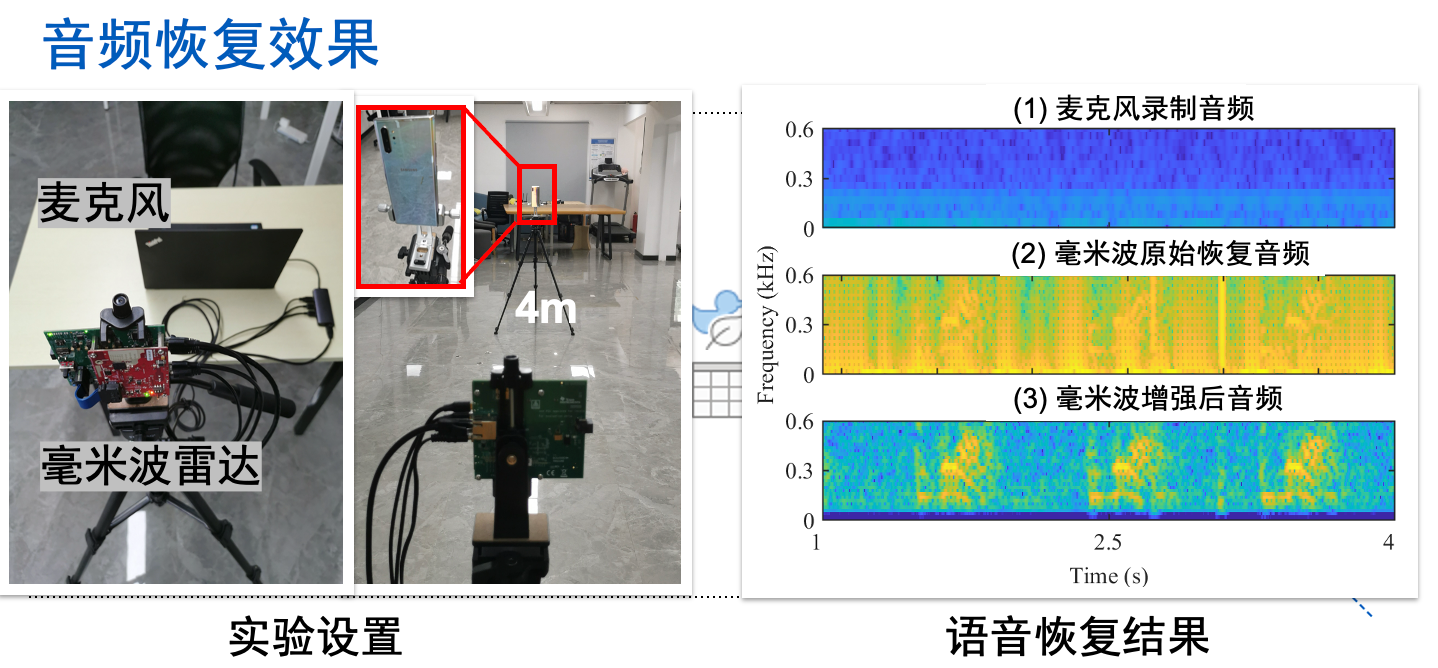
2. mmEve: 基于毫米波的远距离手机语音窃听(针对物体)¶
手机被手拿着的时候不可能是静止的,本身会有晃动,所以比识别静止的扬声器带来更大的挑战。
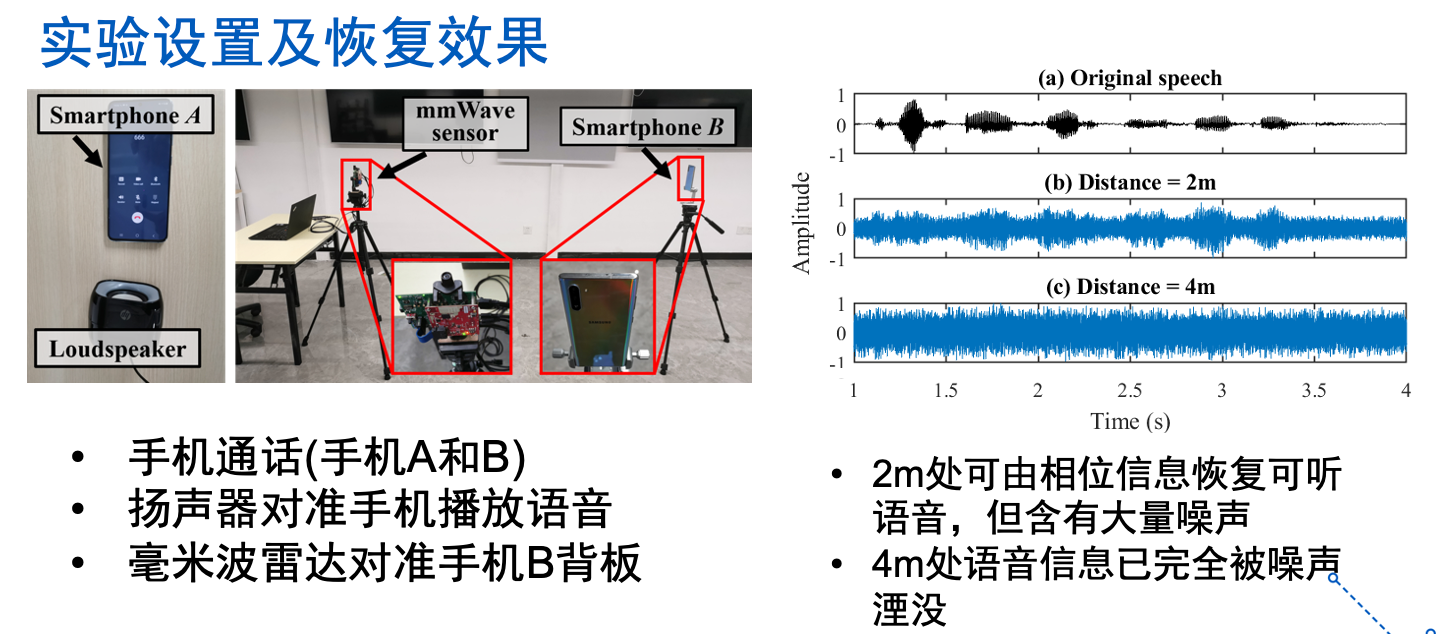
可以看到,波形被噪声淹没了,和人的恢复不一样,因为手机音量小,而且有外界干扰。
a是原始说话的波形,b是距离了2m,c是距离了4m。
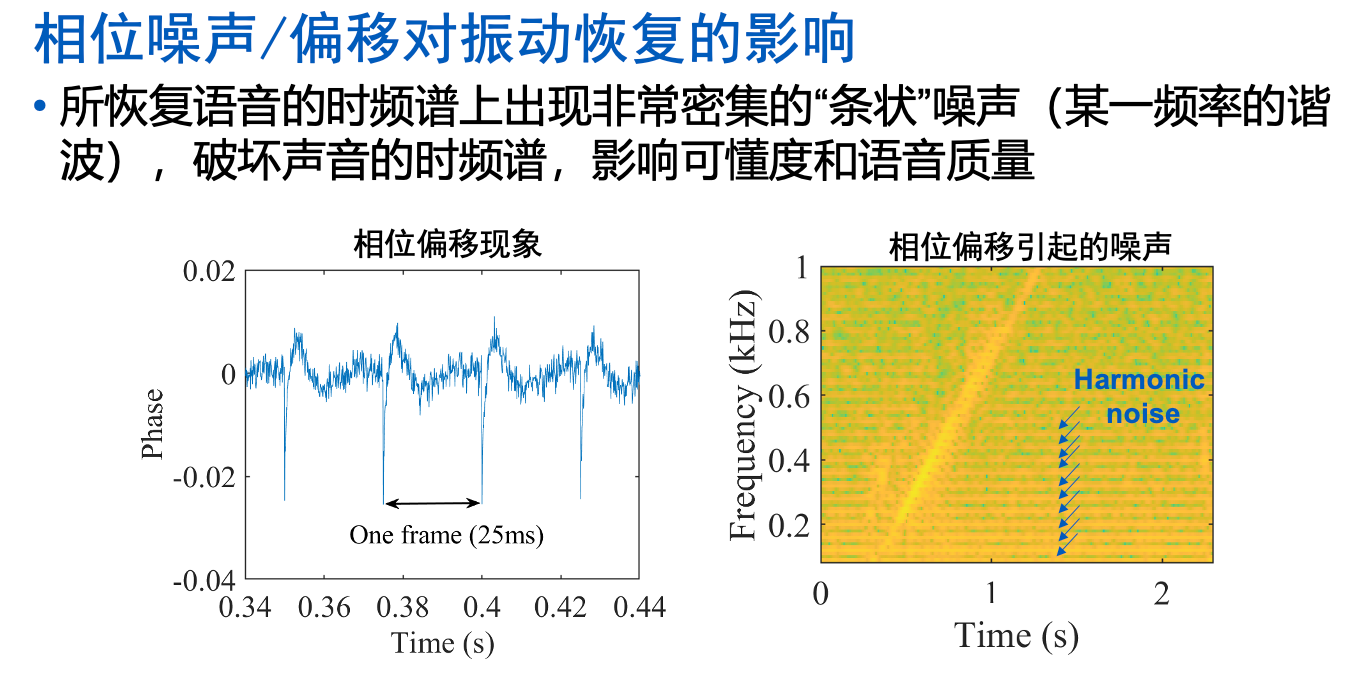
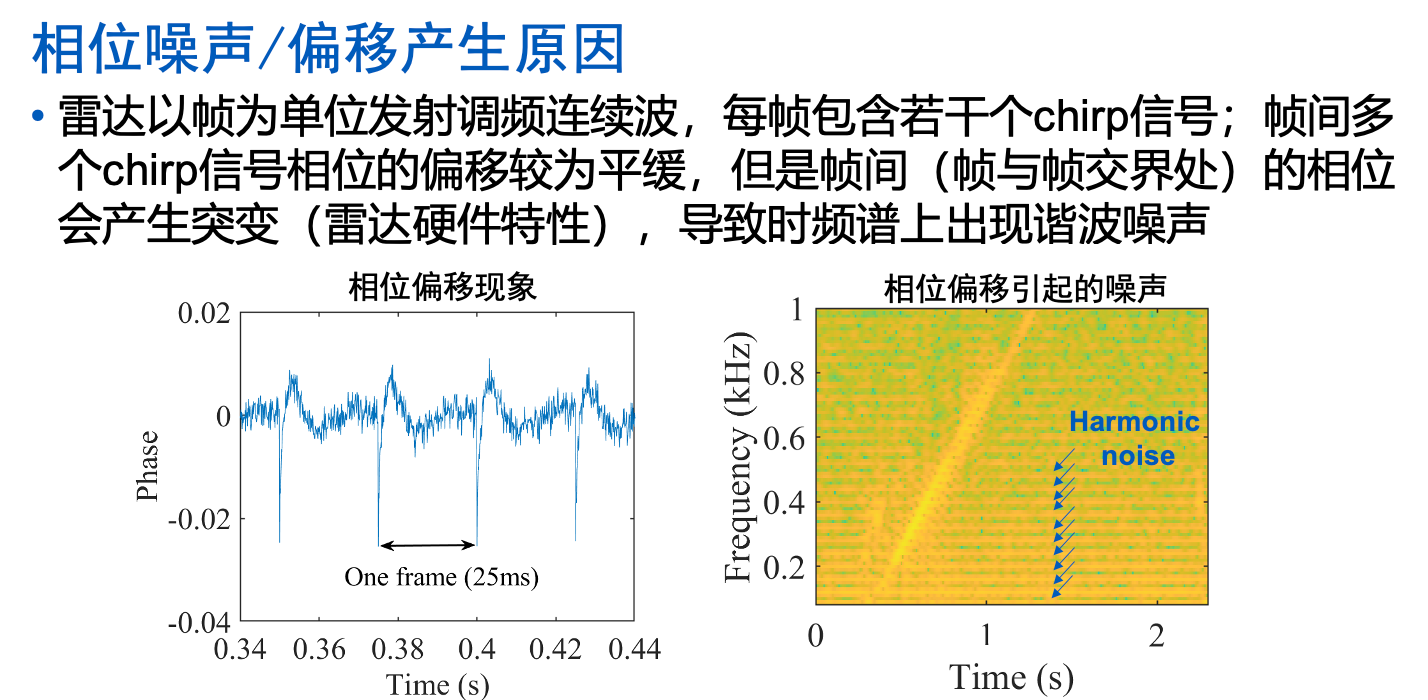
黄颜色的倾斜的是恢复出来的chirp信号,但是还有很多一条一条的黄颜色的都是噪声。
静态/动态干扰消除主要解决的就是手拿着手机带来的晃动带来的干扰。
毫米波本身是用来测速测距测位移的,而不是用来测声音的,所以就有了第三步的语音增强,因为噪声模式是固定的,所以可以通过生成对抗网络去进行学习和去噪。
间隔4m麦克风已经无法识别声音。
如何防护:在手机中使用缓振材料,吸波材料。
本文总阅读量次